一种基于体素划分的实时点云目标检测方法及装置与流程
本发明涉及人工智能领域,尤其涉及一种基于体素划分的实时点云目标检测方法及装置。
背景技术:
1、点云数据是指在一个三维坐标系中的一组向量的集合。空间信息以点的形式记录,每一个点包含有三维坐标。根据点云采集设备的数据采集能力的差异,有些点云数据中可能还含有颜色信息或反射强度信息等,在点云数据的应用过程中,通常要采用点云检测和分割技术,以基于点云数据进行目标物检测和点云分割。其中,点云检测技术指通过对点云数据进行处理,检测出出点云数据匹配的场景中的目标物的位置以便于后续进行处理。
2、目前,现有方案由于点云数据具有稀疏性和无规则性的特点,因此,在对道路状态进行图像数据采集及道路状态分析时,通过点云数据进行目标检测及状态分析时往往准确率偏低。
技术实现思路
1、本发明提供了一种基于体素划分的实时点云目标检测方法及装置,用于提高目标检测及状态分析的准确率。
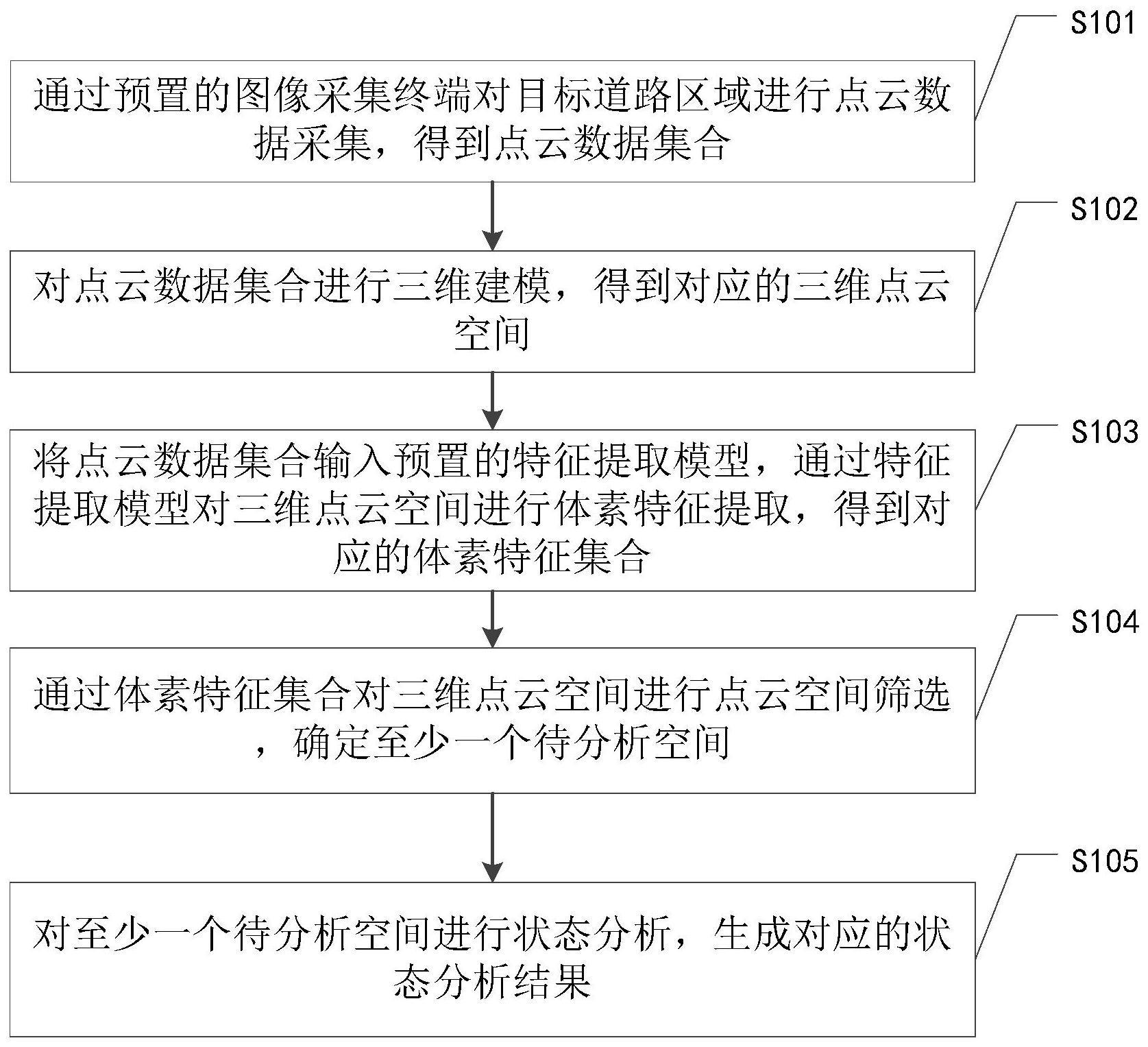
2、本发明提供了一种基于体素划分的实时点云目标检测方法,所述基于体素划分的实时点云目标检测方法包括:通过预置的图像采集终端对目标道路区域进行点云数据采集,得到点云数据集合;对所述点云数据集合进行三维建模,得到对应的三维点云空间;将所述点云数据集合输入预置的特征提取模型,通过所述特征提取模型对所述三维点云空间进行体素特征提取,得到对应的体素特征集合;通过所述体素特征集合对所述三维点云空间进行点云空间筛选,确定至少一个待分析空间;对所述至少一个待分析空间进行状态分析,生成对应的状态分析结果。
3、在本发明中,所述对所述点云数据集合进行三维建模,得到对应的三维点云空间,包括:对所述点云数据集合进行语义分割,确定对应的语义信息;对所述点云数据集合进行深度真值分析,确定对应的深度真值集合;通过所述语义信息及所述深度真值集合对所述点云数据集合进行三维建模,得到对应的三维点云空间。
4、在本发明中,所述将所述点云数据集合输入预置的特征提取模型,通过所述特征提取模型对所述三维点云空间进行体素特征提取,得到对应的体素特征集合,包括:将所述点云数据集合输入所述特征提取模型进行体素点分析,确定对应的体素点集合;基于所述体素点集合,对所述三维点云空间进行空间分割,确定对应的多个点云子空间;分别对每一所述点云子空间进行体素特征提取,得到对应的体素特征集合。
5、在本发明中,所述分别对每一所述点云子空间进行体素特征提取,得到对应的体素特征集合,包括:分别对每一所述点云子空间进行体素蔟分析,确定对应的体素簇;通过所述体素簇对每一所述点云子空间进行体素分布分析,确定与每一所述点云子空间对应的体素分布数据;基于与每一所述点云子空间对应的体素分布数据分别对每一所述点云子空间进行体素特征提取,得到对应的体素特征集合。
6、在本发明中,所述通过所述体素特征集合对所述三维点云空间进行点云空间筛选,确定至少一个待分析空间,包括:对所述体素特征集合与预置的模板体素特征集合进行相似度计算,确定对应的相似度计算结果;通过所述相似度计算结果对所述三维点云空间进行点云空间筛选,确定至少一个待分析空间。
7、在本发明中,所述通过所述相似度计算结果对所述三维点云空间进行点云空间筛选,确定至少一个待分析空间,包括:对所述相似度计算结果进行排序处理,确定对应的相似度排序结果;通过所述相似度排序结果对所述三维点云空间进行点云空间筛选,确定至少一个待分析空间。
8、在本发明中,所述对所述至少一个待分析空间进行状态分析,生成对应的状态分析结果,包括:对所述至少一个待分析空间进行体素特征匹配,确定对应的待处理体素特征集合;将所述待处理体素特征集合输入预置的卷积神经网络进行卷积处理,得到对应的体素卷积特征;通过所述体素卷积特征对所述至少一个待分析空间进行状态匹配,确定对应的状态分析结果。
9、本发明第二方面提供了一种基于体素划分的实时点云目标检测装置,所述基于体素划分的实时点云目标检测装置包括:
10、采集模块,用于通过预置的图像采集终端对目标道路区域进行点云数据采集,得到点云数据集合;
11、建模模块,用于对所述点云数据集合进行三维建模,得到对应的三维点云空间;
12、提取模块,用于将所述点云数据集合输入预置的特征提取模型,通过所述特征提取模型对所述三维点云空间进行体素特征提取,得到对应的体素特征集合;
13、筛选模块,用于通过所述体素特征集合对所述三维点云空间进行点云空间筛选,确定至少一个待分析空间;
14、分析模块,用于对所述至少一个待分析空间进行状态分析,生成对应的状态分析结果。
15、在本发明中,所述建模模块具体用于:对所述点云数据集合进行语义分割,确定对应的语义信息;对所述点云数据集合进行深度真值分析,确定对应的深度真值集合;通过所述语义信息及所述深度真值集合对所述点云数据集合进行三维建模,得到对应的三维点云空间。
16、在本发明中,所述提取模块还包括:输入单元,用于将所述点云数据集合输入所述特征提取模型进行体素点分析,确定对应的体素点集合;分割单元,用于基于所述体素点集合,对所述三维点云空间进行空间分割,确定对应的多个点云子空间;提取单元,用于分别对每一所述点云子空间进行体素特征提取,得到对应的体素特征集合。
17、本发明提供的技术方案中,通过预置的图像采集终端对目标道路区域进行点云数据采集,得到点云数据集合;对所述点云数据集合进行三维建模,得到对应的三维点云空间;将所述点云数据集合输入预置的特征提取模型,通过所述特征提取模型对所述三维点云空间进行体素特征提取,得到对应的体素特征集合;通过所述体素特征集合对所述三维点云空间进行点云空间筛选,确定至少一个待分析空间;对所述至少一个待分析空间进行状态分析,生成对应的状态分析结果,本发明通过对目标道路区域进行三维建模和特征提取,并将提取得到的体素特征集合进行状态分析,进而实现对目标道路区域的实时点云目标检测,提高了对目标道路区域的目标检测及状态分析的准确率。
技术特征:
1.一种基于体素划分的实时点云目标检测方法,其特征在于,方法包括:
2.根据权利要求1所述的基于体素划分的实时点云目标检测方法,其特征在于,所述对所述点云数据集合进行三维建模,得到对应的三维点云空间,包括:
3.根据权利要求1所述的基于体素划分的实时点云目标检测方法,其特征在于,所述将所述点云数据集合输入预置的特征提取模型,通过所述特征提取模型对所述三维点云空间进行体素特征提取,得到对应的体素特征集合,包括:
4.根据权利要求3所述的基于体素划分的实时点云目标检测方法,其特征在于,所述分别对每一所述点云子空间进行体素特征提取,得到对应的体素特征集合,包括:
5.根据权利要求1所述的基于体素划分的实时点云目标检测方法,其特征在于,所述通过所述体素特征集合对所述三维点云空间进行点云空间筛选,确定至少一个待分析空间,包括:
6.根据权利要求5所述的基于体素划分的实时点云目标检测方法,其特征在于,所述通过所述相似度计算结果对所述三维点云空间进行点云空间筛选,确定至少一个待分析空间,包括:
7.根据权利要求1所述的基于体素划分的实时点云目标检测方法,其特征在于,所述对所述至少一个待分析空间进行状态分析,生成对应的状态分析结果,包括:
8.一种基于体素划分的实时点云目标检测装置,其特征在于,所述基于体素划分的实时点云目标检测装置包括:
9.根据权利要求8所述的基于体素划分的实时点云目标检测装置,其特征在于,所述建模模块具体用于:
10.根据权利要求8所述的基于体素划分的实时点云目标检测装置,其特征在于,所述提取模块还包括:
技术总结
本发明涉及人工智能领域,公开了一种基于体素划分的实时点云目标检测方法及装置,用于提高目标检测及状态分析的准确率。方法包括:通过预置的图像采集终端对目标道路区域进行点云数据采集,得到点云数据集合;对所述点云数据集合进行三维建模,得到对应的三维点云空间;将所述点云数据集合输入预置的特征提取模型,通过所述特征提取模型对所述三维点云空间进行体素特征提取,得到对应的体素特征集合;通过所述体素特征集合对所述三维点云空间进行点云空间筛选,确定至少一个待分析空间;对所述至少一个待分析空间进行状态分析,生成对应的状态分析结果。
技术研发人员:张雪兵,张培
受保护的技术使用者:深圳优立全息科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!