基于激光雷达的铁路危情监测方法与流程
本发明涉及轨道交通安全,尤其涉及基于激光雷达的铁路危情监测方法。
背景技术:
1、针对高铁和旅客列车安全为重点的铁路周界安全监测是目前铁路安全领域的发展重点,涉及铁路周界的安全问题的发生具有突发性和偶然性,而传统的巡查、管控的工作模式已不能满足现阶段铁路运营安全需求,因此迫切需要先进的技术手段全面、及时的发现铁路周界环境安全隐患,减轻人工排查沿线隐患的工作量及难度,为列车的安全运行提供有力保障。
2、基于非接触障碍物检测技术的周界安全监测是目前较为先进的技术,其主要是基于两类传感器:激光雷达传感器和视觉传感,它们都是通过监测物体侵入过程中的遮挡从而实现监测。对于基于激光雷达的铁路周界安全监测,其获得监测数据是包含背景和障碍物的点云数据,为了对障碍物完成识别和处理,需要将障碍物从点云中分割出来,以便于单独处理。一方面,现有的障碍物分割方法很容易出现将目标与地面聚为一类,或是雨雾天气下,目标易与周边稀疏的点聚为一类。并且由于点云数据在不同距离处具有不同的点云密度,容易导致对较远目标的分割产生分裂。另一方面,基于激光雷达的铁路危情监测,除了要应对正常晴好天气,还要应对暴雨浓雾等极端天气的印象,在雨雾天气的影响下,激光雷达采集到的点云数据存在一些雨滴云雾的干扰数据,甚至出现地面水滴溅起被雷达采集的情况;在这些雨雾干扰下,导致算法检测得到的障碍物可能存在漏报或者误报;而传统的直通滤波、均匀采样滤波、统计离散点滤波只能简单的进行去噪平滑处理,对较大颗粒的噪声点云无法进行处理。
技术实现思路
1、为了解决上述技术问题,本发明提供的技术方案包括:
2、基于激光雷达的铁路危情监测方法,包括步骤:
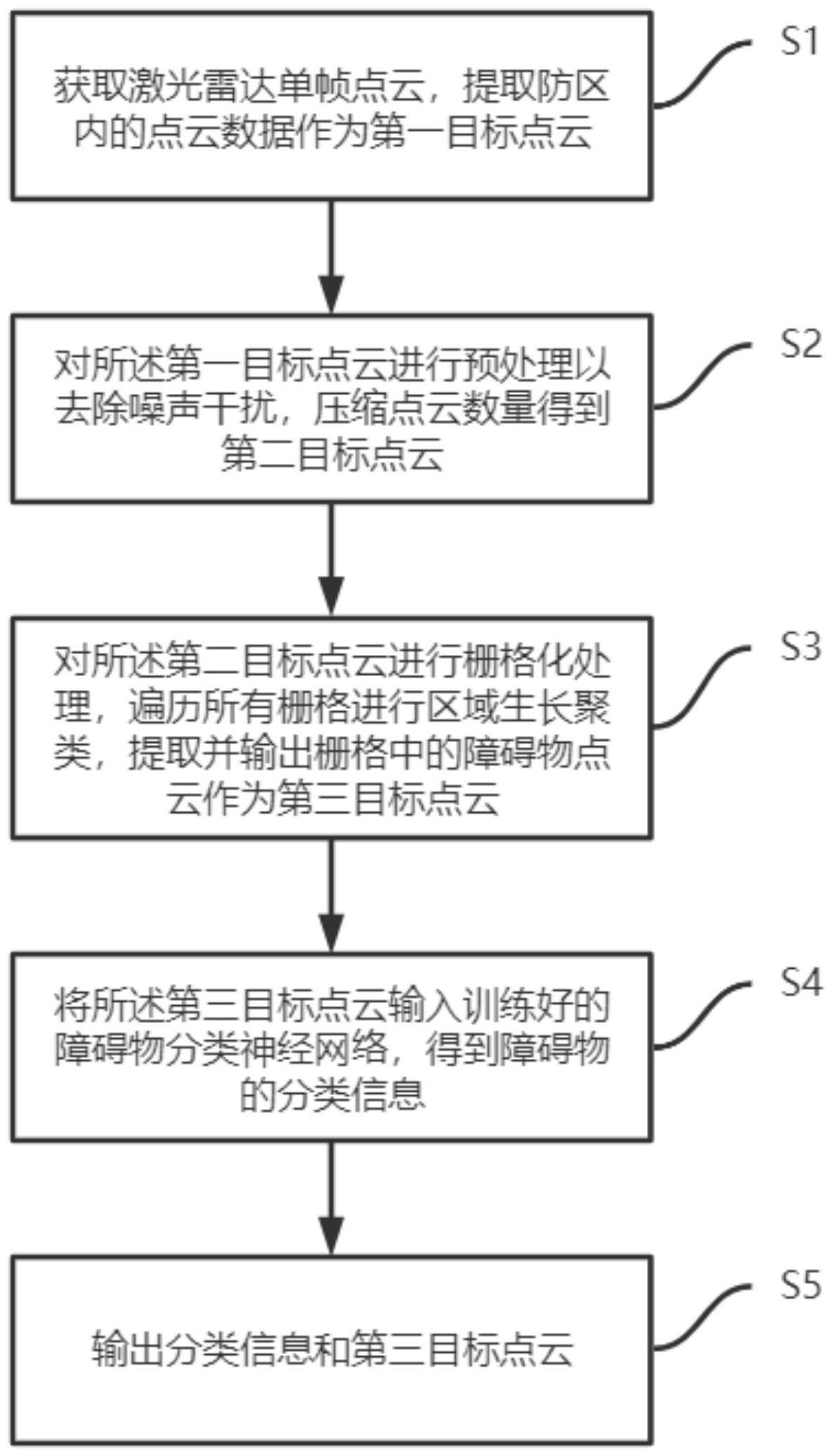
3、s1、获取激光雷达单帧点云,提取防区内的点云数据作为第一目标点云;
4、s2、对所述第一目标点云进行预处理以去除噪声干扰,压缩点云数量得到第二目标点云;
5、s3、对所述第二目标点云进行栅格化处理,遍历所有栅格进行区域生长聚类,提取并输出栅格中的障碍物点云作为第三目标点云;
6、s4、将所述第三目标点云输入训练好的障碍物分类神经网络,得到障碍物的分类信息;
7、s5、输出分类信息和第三目标点云。
8、在一些较优的实施例中,步骤s2中所述预处理以去除噪声干扰的方法包括:
9、s201、以激光雷达为原点,采用半径自适应滤波法对第一目标点云进行滤波;
10、s202、以晴好天气下无障碍物的单帧点云为标定点云,利用分割算法和标定点云对滤波后的第一目标点云中的疑似障碍物进行分割;
11、s203、设置判定阈值,滤除分割后的疑似障碍物点云中的压缩点云数量颗粒噪声点云,完成雨雾噪声干扰的去除;所述判定阈值包括疑似障碍物最小长宽高值、点占比。
12、在一些较优的实施例中,步骤s201中的所述半径自适应滤波法包括步骤:
13、设置初始搜索圆半径r,设置每个激光点在搜索圆半径r内的邻域中至少包含的近邻点数量k;
14、计算第一目标点云中每个点到原点的x方向的距离lxi,计算邻阈半径系数λ,其中lmin为第一目标点云中离原点最近的点的x方向距离,α为调整系数且α∈(0,1);
15、对第一目标点云中每个点计算其自适应半径阈值r′=rλlxi,然后以r′为半径进行圆内邻近点搜索,保留圆内的点,删除圆外的点。
16、在一些较优的实施例中,步骤s2中所述压缩点云数量的方法包括:
17、根据单帧点云创建下采样最小立方栅格,设定栅格边长l,所述边长l与邻近点个数k成正比,与点云的平均密度成反比;
18、将预处理后第一目标点云划分到m*n*l个下采样最小立方栅格中,其中,m=ceil(lx/l),n=ceil(ly/l),z=ceil(lz/l),lx表示点云x轴方向最大范围,ly表示点云y轴方向最大范围,lz表示点云z轴方向最大范围;对于任一点pi,其所属下采样最小立方栅格号为(mpi,npi,lpi),
19、
20、将下采样最小立方栅格号相同的点云数据分别归集为若干栅格点云集合;
21、依次计算各栅格点云集合的中心坐标,保留该中心坐标所代表的点云数据,删除该栅格内其他点云数据。
22、在一些较优的实施例中,步骤s3中所述栅格化处理的方法包括:以激光雷达为中心,建立球坐标系,球坐标系中任一点p的坐标:p(ρ、θ、φ),其中ρ为径向距离、θ为方位角、φ为极角;以δρ、δθ和δφ来划分栅格。
23、在一些较优的实施例中,所述步骤s3包括:
24、s301、对所述第二目标点云进行栅格化处理,计算栅格中点云特征值,将特征值方差大于第一预设阈值的栅格,标记为多障碍栅格;
25、s302、遍历所有栅格,对多障碍栅格进行邻域栅格区域生长聚类,对其他栅格判断其是否存在障碍,若是,则标记为障碍栅格;
26、s303、提取多障碍栅格中的障碍物点云;
27、s304、遍历所有障碍栅格,进行栅格内区域生长聚类,并提取障碍栅格中的障碍物点云;
28、s305、判断障碍物点云特征值是否满足第二预设阈值,若是,则输出障碍物点云;
29、所述特征值包括栅格内点云的高度差,重心和方差。
30、在一些较优的实施例中,步骤s302中所述对其他栅格判断其是否存在障碍的方法包括:计算栅格内各点云的高度差是否小于预设高度差阈值,若是,则判定其存在障碍。
31、在一些较优的实施例中,所述区域生长聚类的方法包括:
32、依次遍历所有栅格,若栅格内点云数大于5,且点云间高度差大于高度差阈值,则将该栅格标记为种子栅格;
33、以种子栅格为中心,依次遍历其周边8邻域的栅格,寻找并标记其他种子栅格;
34、重复上面两个步骤,直至邻域栅格内不存在种子栅格,完成单个障碍物的聚类。
35、在一些较优的实施例中,还包括步骤:
36、s6、利用所述分类信息和第三目标点云重构障碍物真实三维图像,并通过交互装置展示和进行报警。
37、有益效果
38、本发明实现了对于各种情况下的激光雷达点云数据的过滤和聚类,能够避免是离雷达较远的障碍物因点云的系数而被分割为多类的情况,还能滤除极端天气下的雨雾及其他细小物体对激光雷达点云的噪声干扰,从而提高了障碍物分割点云分割、匹配和分类的效率和准确度,提高了监测精度、减少算力资源的占用和监测流程的耗时。
技术特征:
1.基于激光雷达的铁路危情监测方法,其特征在于,包括步骤:
2.如权利要求1所述的基于激光雷达的铁路危情监测方法,其特征在于,步骤s2中所述预处理以去除噪声干扰的方法包括:
3.如权利要求2所述的基于激光雷达的铁路危情监测方法,其特征在于,步骤s201中的所述半径自适应滤波法包括步骤:
4.如权利要求1所述的基于激光雷达的铁路危情监测方法,其特征在于,步骤s2中所述压缩点云数量的方法包括:
5.如权利要求1所述的基于激光雷达的铁路危情监测方法,其特征在于,步骤s3中所述栅格化处理的方法包括:以激光雷达为中心,建立球坐标系,球坐标系中任一点p的坐标:其中ρ为径向距离、θ为方位角、为极角;以δρ、δθ和来划分栅格。
6.如权利要求1或5所述的基于激光雷达的铁路危情监测方法,其特征在于,所述步骤s3包括:
7.如权利要求6所述的基于激光雷达的铁路危情监测方法,其特征在于,步骤s302中所述对其他栅格判断其是否存在障碍的方法包括:计算栅格内各点云的高度差是否小于预设高度差阈值,若是,则判定其存在障碍。
8.如权利要求6所述的基于激光雷达的铁路危情监测方法,其特征在于,所述区域生长聚类的方法包括:
9.如权利要求6所述的基于激光雷达的铁路危情监测方法,其特征在于,还包括步骤:
技术总结
本发明公开了基于激光雷达的铁路危情监测方法,包括步骤:获取激光雷达单帧点云,提取防区内的点云数据作为第一目标点云;对第一目标点云进行预处理以去除噪声干扰,压缩点云数量得到第二目标点云;对第二目标点云进行栅格化处理,遍历所有栅格进行区域生长聚类,提取并输出栅格中的障碍物点云作为第三目标点云;将第三目标点云输入训练好的障碍物分类神经网络,得到障碍物的分类信息;输出分类信息和第三目标点云。本发明实现了对于各种情况下的激光雷达点云数据的过滤和聚类,能够避免是离雷达较远的障碍物因点云的系数而被分割为多类的情况,还能滤除极端天气下的雨雾及其他细小物体对激光雷达点云的噪声干扰。
技术研发人员:王成,武玉琪,潘泽民
受保护的技术使用者:四川西南交大铁路发展股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!