一种无人机回收双向流固耦合的数值模拟方法
本发明属于航空航天,具体涉及一种无人机回收双向流固耦合的数值模拟方法。
背景技术:
1、无人机回收技术在军事领域有很高的应用前景,近年来美国国防高级研究计划局(darpa)启动了一系列的无人机回收试飞,其中9次尝试回收三架“小精灵”无人机均已失败告终,无人机回收技术是其中最重要的一环。在未来作战中,大型有人机与小型无人机的结合,将使无人机的性能得到充分发挥,通过在敌防区外由现役战机投放,无人机执行相应作战任务后回收,借助载机较长的滞空时间和航程,无人机的作战距离和反应时间得到有效提升,在热点区域上空既可以通过不断派出无人机对敌方保持压力,也可以用“机海”战术掩护有人机作战。
2、但在回收过程中,拖曳对接装置、载机尾流会与无人机之间相互影响,让所有组件协同工作,增加对接成功的几率,就需要完整的数值模拟方法分析整个对接过程的运动变化。现有的技术中,多为单一简单模型的流固耦合,存在载机尾迹和柔性绳拖曳等共同作用时,具有复杂曲面的无人机回收过程较难实现。
3、专利《cn109783978a-一种基于ansys workbench的微型扑翼飞行器气动数值模拟仿真方法》描述的是使用ansys workbench软件实现对简单扑翼模型的流固耦合模拟,其方法只适用于简单模型,对于多个模型的刚柔耦合复杂流程模拟难以实现,复杂曲面网格适应性也较差。
技术实现思路
1、本发明的目的在于提供一种无人机回收双向流固耦合的数值模拟方法,提出完整的多复杂曲面模型刚柔耦合计算流程,解决多个模型刚柔耦合难以计算、计算效率低的问题。
2、本发明是通过以下技术方案来实现:
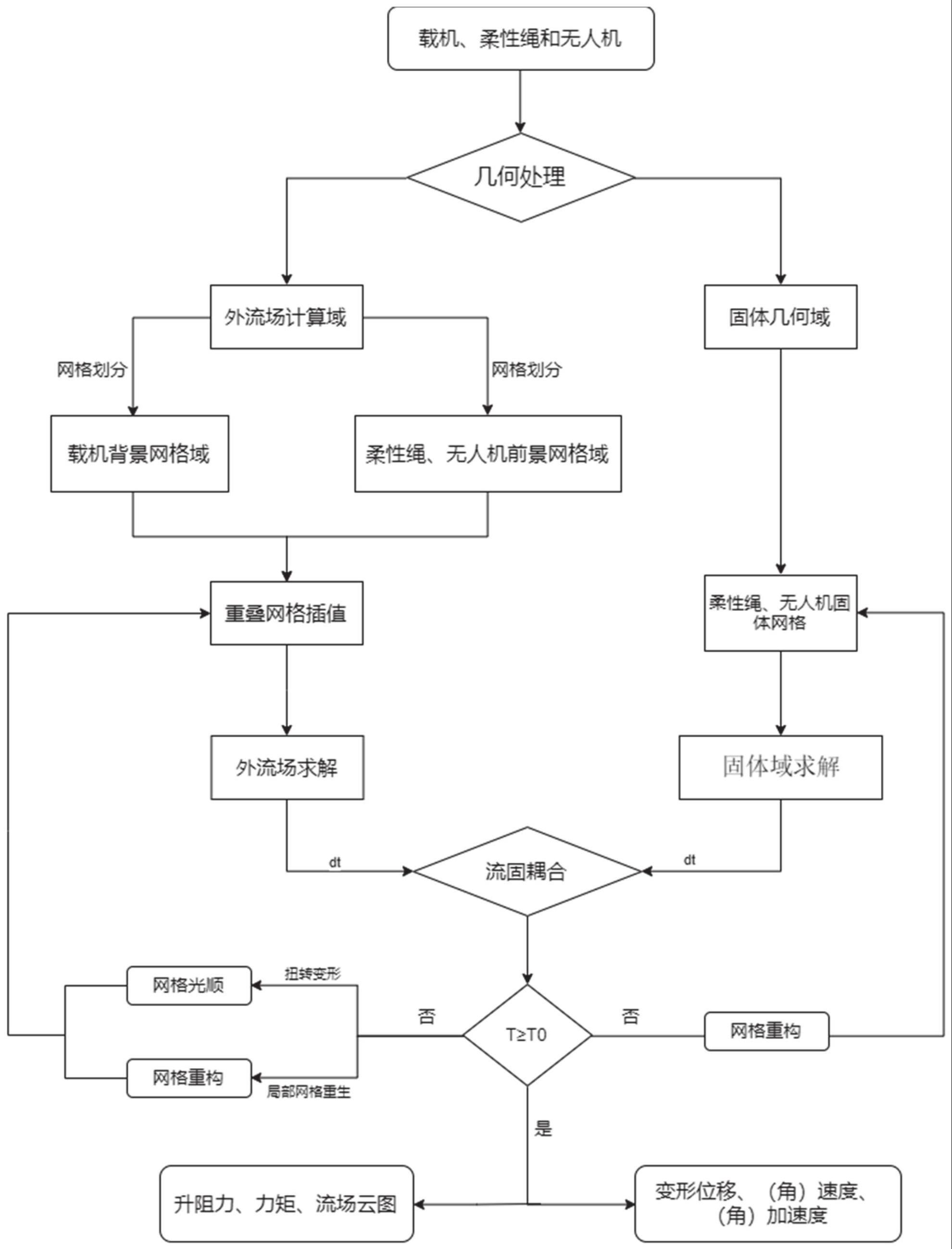
3、一种无人机回收双向流固耦合的数值模拟方法,包括以下步骤:
4、步骤1、选取载机、柔性绳和无人机模型作为模拟对象;
5、步骤2、通过几何处理对模拟对象进行不同计算区域划分,得到外流场计算域和固体计算域;
6、步骤3、对固体计算域进行网格划分,均布模型表面网格节点,得到固体计算网格;
7、对外流场计算域进行网格划分,生成载机背景网格域和包含柔性绳、无人机的前景网格域,在前景网格域与背景网格域重叠部分,通过局部加密控制其网格尺寸,构建插值后的重叠网格;
8、步骤4、使用流体求解器对插值后的重叠网格进行计算,得到网格节点处的流场数据;
9、使用固体求解器计算步骤3中生成的固体计算网格,得到网格节点处的固体变形数据;
10、步骤5、将步骤4得到的流场数据和固体变形数据,通过流固双向耦合的方式,输出耦合结果;
11、步骤6、以无人机回收时间t0作为判断条件,对耦合部分使用的流体域和固体域进行网格调整和结果输出;
12、如不满足流固耦合模拟时间t≥t0,进行步骤7,反之,进行步骤8;
13、步骤7、外流场计算域网格根据网格变形阈值进行网格扭转变形和局部网格重生;
14、固体几何域网格进行网格重构;
15、步骤8、输出计算结果,查看载机的尾迹作用区域对柔性绳和无人机运动轨迹的影响,判断回收过程成功率和隔模型布局的合理性,来对不同部件进行调整优化,更改模拟对象不同的适用材料特性。
16、进一步,步骤2中,在无人机回收过程中,外流场计算域包含载机、柔性绳和无人机;
17、固体计算域包含柔性绳和无人机,其中载机只负责产生尾迹,并作用于柔性绳子和无人机部分,不参与固体的变形计算。
18、进一步,步骤3中,对固体计算域进行网格划分,具体如下:
19、针对柔性绳和无人机绘制内部固体网格,网格尺寸以无人机后缘大小为参考进行划分,柔性绳使用六面体网格扫掠,无人机表面使用非结构网格填充,得到固体计算网格。
20、进一步,步骤3中,对外流场计算域进行网格划分,具体包括以下步骤:
21、3.1、针对载机单独绘制流体网格,作为重叠网格的背景网格部分;
22、3.2、整个载机部分使用10倍~20倍机翼后缘尺寸划分,对柔性绳和无人机所处的相对空间位置进行局部的空间网格加密,用来后续的重叠部分网格插值,对于气动特性影响突出的主翼、平尾、垂尾和无人机机翼部位构建加密框,表面网格为三角形,空间网格使用ploy-hexcore方法创建截面形状为六边形填充;柔性绳和无人机共同绘制流体网格,作为重叠网格的前景网格部分;
23、3.3、柔性绳和无人机根据最小曲面尺寸进行网格划分,以3.2中前景网格处加密的空间网格尺寸进行柔性绳和无人机周边网格的加密,构建插值后的重叠网格。
24、进一步,步骤4中,流场数据的具体得到过程为:使用流体求解器对插值后的重叠网格进行定常计算,使用定常计算的最终解作为非定常计算的初始场,开始计算外流场计算域的非定常计算部分,得到网格节点处的流场数据。
25、进一步,步骤4中,固体变形数据的具体得到过程为:
26、使用固体求解器计算步骤3中生成的固体计算网格,选取和外流场非定常计算相同的时间步长,赋予柔性绳和无人机对应的材料属性,添加重力作用,监测对应的变形和速度参数,得到网格节点处的固体变形数据。
27、进一步,步骤5具体为:
28、将步骤4得到的流场数据和固体变形数据,通过流固双向耦合的方式,建立流体域和固体域的力和位移参数交换,设置流固耦合模拟时间t和耦合时间步长,调整结果输出频率为多次耦合保存,并输出最后一次的耦合结果。
29、进一步,步骤7中,外流场计算域网格通过网格光顺,根据网格变形阈值进行网格扭转变形;同时,外流场计算域网格通过网格最小尺寸和0.95网格斜度值的线弹性体方法进行局部网格重生。
30、进一步,步骤8中,计算结果包括升阻力、力矩、流场云图、变形位移、速度和加速度。
31、与现有技术相比,本发明具有以下有益的技术效果:
32、本发明公开了一种无人机回收双向流固耦合的数值模拟方法,采用远场背景网格和运动部件(如无人机)前景网格,前景网格局部扭转变形和重构的方法,实现多个模型的刚柔耦合。同时对于多个运动部件都具有很好的鲁棒性,复杂曲面的计算如无人机回收,能较为真实的反应无人机回收过程运动变化,能够准确的模拟无人机的运动边界,提供载机尾流和柔性绳拖曳共同作用下的回收安全性评估。
33、本发明通过定常加非定常的模拟方式能更真实的反映回收过程流场的变化,能同时适应多个无人机的回收过程,整个流程操作简单,适用性强,工程实用性高。
34、通过本发明方法获得无人机在回收过程各气动参数变化,如速度、角速度、角加速度、力矩、升阻力以及绳子的变形位移和云图,能快速判断回收过程的成功率和布局的合理性,方便对不同部件进行调整优化,配置不同的材料特性。
技术特征:
1.一种无人机回收双向流固耦合的数值模拟方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种无人机回收双向流固耦合的数值模拟方法,其特征在于,步骤2中,在无人机回收过程中,外流场计算域包含载机、柔性绳和无人机;
3.根据权利要求1所述的一种无人机回收双向流固耦合的数值模拟方法,其特征在于,步骤3中,对固体计算域进行网格划分,具体如下:
4.根据权利要求1所述的一种无人机回收双向流固耦合的数值模拟方法,其特征在于,步骤3中,对外流场计算域进行网格划分,具体包括以下步骤:
5.根据权利要求1所述的一种无人机回收双向流固耦合的数值模拟方法,其特征在于,步骤4中,流场数据的具体得到过程为:使用流体求解器对插值后的重叠网格进行定常计算,使用定常计算的最终解作为非定常计算的初始场,开始计算外流场计算域的非定常计算部分,得到网格节点处的流场数据。
6.根据权利要求1所述的一种无人机回收双向流固耦合的数值模拟方法,其特征在于,步骤4中,固体变形数据的具体得到过程为:
7.根据权利要求1所述的一种无人机回收双向流固耦合的数值模拟方法,其特征在于,步骤5具体为:
8.根据权利要求1所述的一种无人机回收双向流固耦合的数值模拟方法,其特征在于,步骤7中,外流场计算域网格通过网格光顺,根据网格变形阈值进行网格扭转变形;同时,外流场计算域网格通过网格最小尺寸和0.95网格斜度值的线弹性体方法进行局部网格重生。
9.根据权利要求1所述的一种无人机回收双向流固耦合的数值模拟方法,其特征在于,步骤8中,计算结果包括升阻力、力矩、流场云图、变形位移、速度和加速度。
技术总结
本发明属于航空航天技术领域,涉及一种无人机回收双向流固耦合的数值模拟方法,包括以下步骤:对模拟对象进行不同计算区域划分,得到外流场计算域和固体计算域;对固体计算域进行网格划分,得到固体计算网格;对外流场计算域进行网格划分,构建插值后的重叠网格;对插值后的重叠网格进行计算,得到流场数据;计算固体计算网格,得到固体变形数据;将流场数据和固体变形数据,通过流固双向耦合的方式,输出耦合结果;以无人机回收时间T0作为判断条件,如流固耦合模拟时间T<T0,外流场计算域网格根据网格变形阈值进行网格扭转变形和局部网格重生,固体几何域网格进行网格重构;如T≥T0,则输出计算结果,更改模拟对象不同的适用材料特性。
技术研发人员:徐晓刚,张扬,昌敏,任武
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!