一种基于人工智能的夜间灯光影像灯光渔船检测方法与流程
本发明涉及灯光渔船识别应用,特别是涉及一种基于人工智能的夜间灯光影像灯光渔船检测方法。
背景技术:
1、夜间灯光遥感的快速发展为灯光渔船的实时空间位置监测、捕捞作业强度估算和非法捕捞管理等提供了有效的技术支持,对推动渔业资源可持续发展具有重要意义。夜间灯光遥感不仅具有探测范围广、效率高、成本较低等优势还能直观反映夜间的船舶分布情况。
2、当前基于夜间灯光影像的灯光渔船目标检测主要是阈值法,但鲁棒性与可迁移性较差,在复杂场景与大数据的情况下检测性能急剧下降。目前目标检测领域的深度学习方法主要分为两类,一种主要包括fast r-cnn、faster rcnn、mask r-cnn、spp-net、fpn等两阶算法。另一种主要是yolo系列。如图1所示,遥感影像中船只目标较小,容易受到周边环境影响,且夜间灯光影像一般是单波段影像,因此现有目标检测网络较难提取目标特征,因此识别精度较低。
技术实现思路
1、本发明所要解决的技术问题是提供一种基于人工智能的夜间灯光影像灯光渔船检测方法,提升灯光渔船的识别精度。
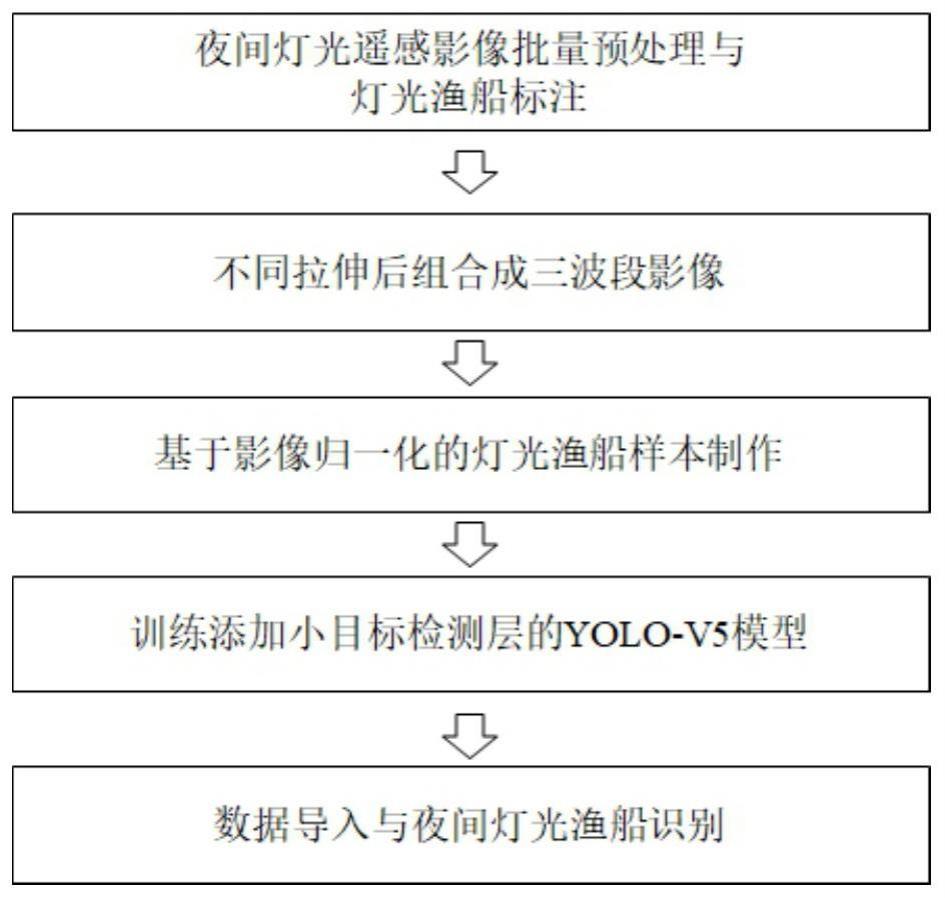
2、本发明解决其技术问题所采用的技术方案是:提供一种基于人工智能的夜间灯光影像灯光渔船检测方法,包括以下步骤:
3、(1)对获取的单波段夜间灯光影像进行预处理,并进行灯光渔船的标注;
4、(2)将预处理后的单波段夜间灯光影像采用两种不同拉伸方式进行处理,并将拉伸处理后的影像与未拉伸前的影像进行组合,形成三波段影像;
5、(3)将组合后的影像进行归一化并映射到预设空间,并生成n*n大小的切片影像;
6、(4)将得到的切片影像分成训练集、验证集和测试集,得到灯光渔船样本集;
7、(5)在yolo-v5网络模型的基础上构建目标识别模型,并使用所述灯光渔船样本集对目标识别模型进行训练,得到灯光渔船识别模型;
8、(6)采用步骤(2)-步骤(3)的方式对待识别的单波段夜间灯光影像进行处理,并将处理后的待识别的单波段夜间灯光影像输入至灯光渔船识别模型,得到夜间灯光渔船的识别结果。
9、所述步骤(1)中的预处理是指对单波段夜间灯光影像进行辐射校正,并批量去除影像中的异常值和负值。
10、所述步骤(2)中的两种不同拉伸方式分别为2%线性拉伸方式和平方根拉伸方式,拉伸处理后的影像表示为:g(x,y)=[(d-c)/(b-a)]*(f(x,y)+c),其中,g(x,y)表示拉伸处理后的影像的像元值,f(x,y)为预处理后的单波段夜间灯光影像的像元值,d和c分别为输出图像的最大值和最小值;当拉伸方式为2%线性拉伸方式时,b和a分别表示单波段夜间灯光影像的累计频率为98%的像元值和2%的像元值,当拉伸方式为平方根拉伸方式时,b和a分别表示单波段夜间灯光影像的最大像元值的平方根和最小像元值的平方根。
11、所述步骤(3)具体为:对三波段影像的像元值利用归一化至[0,1]范围内,使得处理前后影像的像元值形成一一映射的关系,随后乘以255并采用8位进行存储,使影像映射到[0,28-1],对不同幅宽的影像设置步长,进行裁剪生成n*n的切片影像;其中,g(x,y)″表示归一化后的三波段影像的像元值,g(x,y)′为三波段影像的像元值,min和max分别表示三波段影像中最小像元值和最大像元值。
12、所述步骤(5)中的目标识别模型包括:输入层,用于对输入的图片进行mosaic的数据增强,自适应图片缩放以及计算锚点坐标,并增加一个用于检测弱小目标的检测头;主干网络,聚集不同的细粒度图像并形成图像特征图;颈部模块,用于对图像特征图进行上采样,得到不同大小的特征图,并将不同大小的特征图分别与主干网络中不同层的特征图进行合并融合,得到多尺度特征图;预测层,用于生成检测框,采用多尺度特征图检测目标,通过大图像检测小目标,小图像检测大目标。
13、所述主干网络通过焦点模块对图像进行下采样,并利用csp模块和spp模块提取图像中的特征。
14、所述颈部模块采用fpn+pan的结构,其中,上采样过程由3组bottleneckcsp模块、大小为1步长为1的conv模块、upsample模块和concat模块连接完成。
15、所述预测层对多尺度特征图通过conv2d卷积操作,得到四个大小的特征图,其中最大的特征图用于检测小目标。
16、所述步骤(5)中的使用所述灯光渔船样本集对目标识别模型进行训练,具体为:
17、将灯光渔船样本集中的标注信息转为txt文本格式;
18、将灯光渔船样本集中的训练集输入至目标识别模型进行训练;
19、将灯光渔船样本集中的验证集输入至训练好的目标识别模型中进行验证,当验证结果符合要求时,将训练好的目标识别模型作为灯光渔船识别模型。
20、有益效果
21、由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:本发明针对夜间灯光影像等信息较单一的单波段影像采用拉伸的方式组成多波段影像,有效增强特征信息的提取,提升了模型的精度。本发明将夜间灯光影像中的灯光渔船作为模型的样本数据,通过将小目标检测层引入到模型的检测层中,能够更精确识别灯光渔船位置信息。
技术特征:
1.一种基于人工智能的夜间灯光影像灯光渔船检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于人工智能的夜间灯光影像灯光渔船检测方法,其特征在于,所述步骤(1)中的预处理是指对单波段夜间灯光影像进行辐射校正,并批量去除影像中的异常值和负值。
3.根据权利要求1所述的基于人工智能的夜间灯光影像灯光渔船检测方法,其特征在于,所述步骤(2)中的两种不同拉伸方式分别为2%线性拉伸方式和平方根拉伸方式,拉伸处理后的影像表示为:g(x,y)=[(d-c)/(b-a)]*(f(x,y)+c),其中,g(x,y)表示拉伸处理后的影像的像元值,f(x,y)为预处理后的单波段夜间灯光影像的像元值,d和c分别为输出图像的最大值和最小值;当拉伸方式为2%线性拉伸方式时,b和a分别表示单波段夜间灯光影像的累计频率为98%的像元值和2%的像元值,当拉伸方式为平方根拉伸方式时,b和a分别表示单波段夜间灯光影像的最大像元值的平方根和最小像元值的平方根。
4.根据权利要求1所述的基于人工智能的夜间灯光影像灯光渔船检测方法,其特征在于,所述步骤(3)具体为:对三波段影像的像元值利用归一化至[0,1]范围内,使得处理前后影像的像元值形成一一映射的关系,随后乘以255并采用8位进行存储,使影像映射到[0,28-1],对不同幅宽的影像设置步长,进行裁剪生成n*n的切片影像;其中,g(x,y)″表示归一化后的三波段影像的像元值,g(x,y)′为三波段影像的像元值,min和max分别表示三波段影像中最小像元值和最大像元值。
5.根据权利要求1所述的基于人工智能的夜间灯光影像灯光渔船检测方法,其特征在于,所述步骤(5)中的目标识别模型包括:输入层,用于对输入的图片进行mosaic的数据增强,自适应图片缩放以及计算锚点坐标,并增加一个用于检测弱小目标的检测头;主干网络,聚集不同的细粒度图像并形成图像特征图;颈部模块,用于对图像特征图进行上采样,得到不同大小的特征图,并将不同大小的特征图分别与主干网络中不同层的特征图进行合并融合,得到多尺度特征图;预测层,用于生成检测框,采用多尺度特征图检测目标,通过大图像检测小目标,小图像检测大目标。
6.根据权利要求5所述的基于人工智能的夜间灯光影像灯光渔船检测方法,其特征在于,所述主干网络通过焦点模块对图像进行下采样,并利用csp模块和spp模块提取图像中的特征。
7.根据权利要求5所述的基于人工智能的夜间灯光影像灯光渔船检测方法,其特征在于,所述颈部模块采用fpn+pan的结构,其中,上采样过程由3组bottleneckcsp模块、大小为1步长为1的conv模块、upsample模块和concat模块连接完成。
8.根据权利要求5所述的基于人工智能的夜间灯光影像灯光渔船检测方法,其特征在于,所述预测层对多尺度特征图通过conv2d卷积操作,得到四个大小的特征图,其中最大的特征图用于检测小目标。
9.根据权利要求5所述的基于人工智能的夜间灯光影像灯光渔船检测方法,其特征在于,
技术总结
本发明涉及一种基于人工智能的夜间灯光影像灯光渔船检测方法,包括以下步骤:对获取的单波段夜间灯光影像进行预处理,并进行灯光渔船的标注;将预处理后的单波段夜间灯光影像采用两种不同拉伸方式进行处理,并将拉伸处理后的影像与未拉伸前的影像进行组合,形成三波段影像;将三波段影像进行归一化并映射到预设空间,生成N*N大小的切片影像;将切片影像分成训练集、验证集和测试集,得到灯光渔船样本集;在YOLO‑V5网络模型的基础上构建目标识别模型,并使用灯光渔船样本集对目标识别模型进行训练,得到灯光渔船识别模型;将对待识别的单波段夜间灯光影像输入至灯光渔船识别模型,得到夜间灯光渔船的识别结果。本发明能够准确识别夜间作业的灯光渔船。
技术研发人员:周为峰,胡慧娟,姜博辉,程田飞
受保护的技术使用者:中国水产科学研究院东海水产研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!