一种自动驾驶汽车安全性等级评估方法及系统
本发明属于交通运输和自动驾驶领域,具体涉及一种自动驾驶汽车安全性等级评估方法及系统。
背景技术:
1、相对于传统的汽车,自动驾驶汽车在行驶安全性、出行体验性、环境友好性等方面都有更大的优势,因此,自动驾驶汽车是未来汽车发展的主要战略方向。自动驾驶汽车要大量推广的前提是有规范的安全性评价标准,其评价指标要与自动驾驶汽车安全存在关联,评价结果要高效实际,以真实的交通环境为出发点,进行安全可靠的测试。
2、以通过性评价和平均人工接管次数作为评价自动驾驶汽车安全性的指标是当下比较通用的方法,但是这种评价方法对测试用例有针对性,测试过程复杂且危险性较高,因此不具备普遍性也不贴近实际的交通道路情况。朱冰,张培兴,赵健.面向多维度逻辑场景的自动驾驶安全性聚类评价方法[j].汽车工程,2020,42(11)提出了一种面向逻辑多维度场景的自动驾驶安全性聚类评价方法,该方法使用高斯聚类的方法,综合考虑多维度逻辑场景下算法的统计学规律来获得量化指标,但指标的选取随着场景的不同而变化。
3、现有的自动驾驶汽车安全性评价方法大都以人驾车辆的数据为基础进行测评,对于影响自动驾驶汽车安全性的内部影响因素和外部影响因素没有综合考虑,与实际复杂的交通场景存在一定的偏差,在测试过程中的数据多样性、场景多样性、效率、测试维度、全面性等方面都存在一定的不足。仿真测试提供了在虚拟环境中重现车辆系统特征的方法,测试简单、成本低且易于复制。但仿真测试场景存在过程理想化、保真性不足等问题,难以做到贴近实际的复杂交通环境。
技术实现思路
1、本发明的目的在于提供一种自动驾驶汽车安全性等级评估方法及系统,以克服现有技术中以人驾车辆的数据为基础进行测评,仿真测试场景存在过程理想化、保真性不足等问题,难以做到贴近实际的复杂交通环境的问题。
2、本发明一种自动驾驶汽车安全等级评估方法,包括以下步骤:
3、建立自动驾驶汽车数字孪生测试系统;
4、利用建立的自动驾驶汽车数字孪生测试系统测试得到危险测试用例;
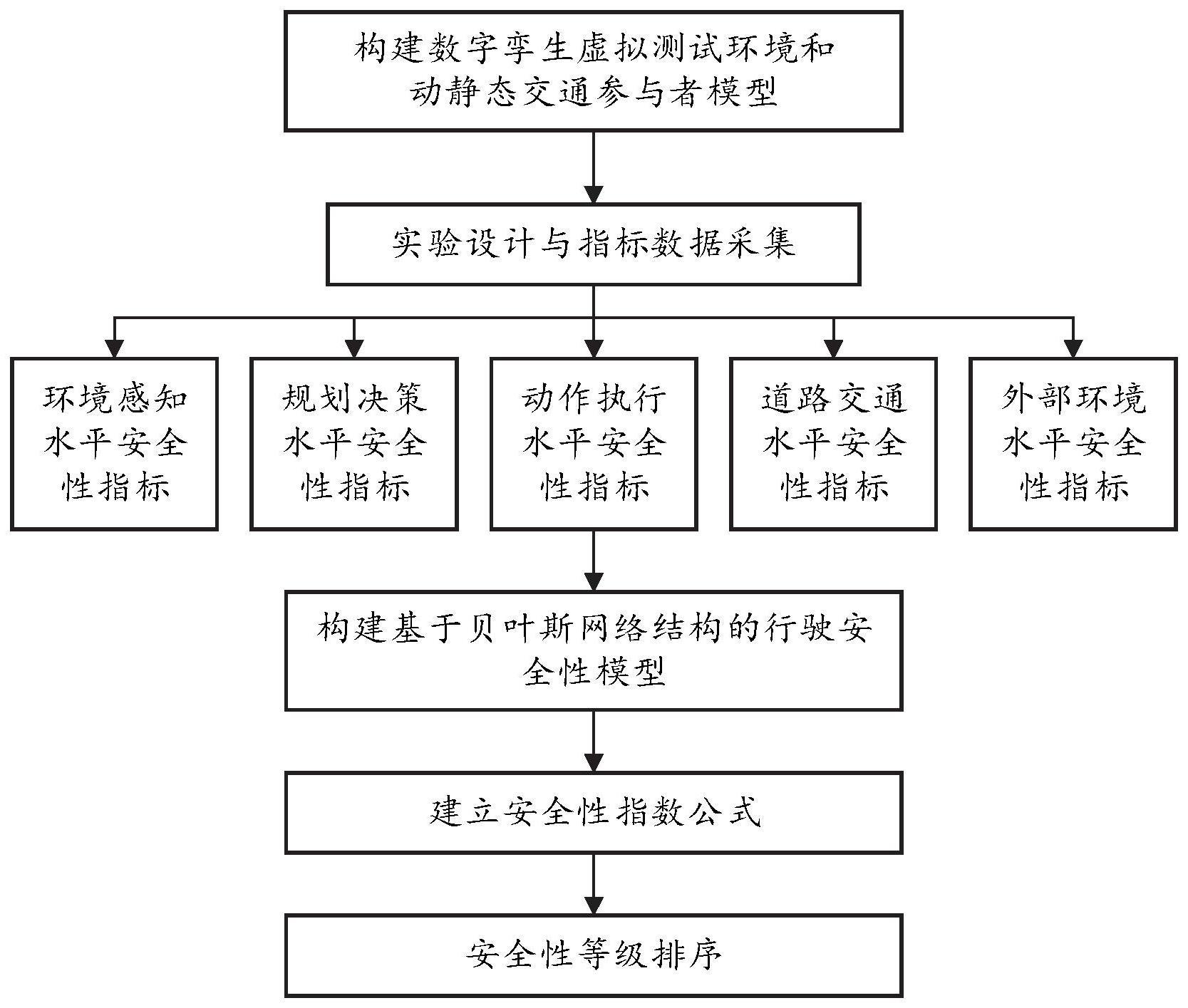
5、构建基于贝叶斯网络结构的车辆-交通-环境博弈模型;根据车辆-交通-环境博弈模型获得的敏感系数,根据敏感系数得到安全性指数;
6、以危险用例的安全性指数作为阈值,根据安全性指数确定自动驾驶汽车安全性。
7、优选的,建立自动驾驶汽车数字孪生测试系统具体包括:
8、对车联网与智能汽车试验场进行高精地图测绘,利用微观交通仿真软件sumo和ue5,通过实测测绘和手工建模建立包含测试道路、路测设施及背景环境的三维数字化试验场和面向数字孪生测试的虚拟孪生测试环境;建立基于euht的综合通信网络,提供高速率低延时通信;建立自动驾驶汽车数字孪生测试系统。
9、优选的,设计多元且真实的测试场景,使用sumo在虚拟孪生测试环境中生成测试车辆或车流,针对可能出现的不同交通情况以及不同的测试场景进行大量的测试,利用自动驾驶汽车数字孪生测试系统,实时精准地获取安全性评估所需要环境感知水平、规划决策水平、动作执行水平、道路交通水平和外部环境水平安全性指标的对应数据,并以碰撞时间(ttc)的倒数(ttc-1)为危险阈值,筛选得到危险测试用例。
10、优选的,碰撞时间的倒数ttc-1>0.7s-1。
11、优选的,构建基于贝叶斯网络结构的车辆-交通-环境博弈模型包括:
12、确定变量集和变量域;
13、确定节点网络;
14、确定节点的先验概率和条件概率。
15、优选的,父节点a包含n个状态,子节点b包含m个状态,a和b的条件概率为:
16、
17、优选的,由于a、b之间的关系为独立的,边缘概率可由以下公式求解:
18、
19、假设行驶安全状态为am,它拥有2个父节点,环境感知水平和规划决策水平,其中环境感知水平状态为bi,规划决策水平状态为bj,则:
20、p(bi,am,bj)=p(bi)p(am|bi,bj)p(bj) (4)
21、优选的,所述安全性指数e用于刻画自动驾驶汽车当前的安全性,安全性指数
22、
23、其中xi(i∈[1,7])表示第i个指标。
24、优选的,行驶安全性通过行驶过程中自动驾驶系统的环境感知水平、动作执行水平、车辆运行状态水平以及外部因素的道路交通水平、外部环境水平共同确定。
25、一种自动驾驶汽车安全性等级评估系统,包括预处理模块和评估模块;
26、预处理模块,用于建立自动驾驶汽车数字孪生测试系统;同时根据建立的自动驾驶汽车数字孪生测试系统测试得到危险测试用例;
27、评估模块,用于存储构建的基于贝叶斯网络结构的车辆-交通-环境博弈模型;并根据车辆-交通-环境博弈模型获得的敏感系数,根据敏感系数得到安全性指数;以危险用例的安全性指数作为阈值,根据安全性指数确定自动驾驶汽车安全性。
28、与现有技术相比,本发明具有以下有益的技术效果:
29、本发明一种自动驾驶汽车安全性等级评估方法,创建了一个基于数字孪生的智能网联汽车测试环境,提供了多样的测试场景,高速率、低延迟的通信系统保证数据实时性,贴近真实交通道路环境;多元的测试指标不单单只考虑自动驾驶汽车本身的安全性相关因素,也考虑了外部因素对自动驾驶汽车安全性造成影响的因素,测试指标更加的全面;在测试系统中进行反复大量的测试,分析各个指标之间存在的关联性、确定网络拓扑结构、连通性,建立基于车辆-环境-交通博弈的自动驾驶汽车安全等级评估模型,并通过贝叶斯网络结构确定指标的敏感系数;最后引入安全性指数用于实现自动驾驶汽车安全性指标的量化评估。为未来自动驾驶汽车的安全性评估提供一定的参考意义。
30、本发明一种自动驾驶汽车安全性等级评估系统,通过建立自动驾驶汽车数字孪生测试系统,提供了多样的测试场景,高速率、低延迟的通信系统保证数据实时性,贴近真实交通道路环境;同时根据建立的自动驾驶汽车数字孪生测试系统进行反复大量的测试得到危险测试用例,构建基于贝叶斯网络结构的车辆-交通-环境博弈模型分析计算得到测评指标的敏感系数,通过获得的敏感系数ωi(i∈[1,7]),引入安全性指数e实现自动驾驶汽车安全性指标的量化评估,为未来自动驾驶汽车的安全性评估提供一定的参考意义。
技术特征:
1.一种自动驾驶汽车安全性等级评估方法,包括以下步骤:
2.根据权利要求1所述的一种自动驾驶汽车安全性等级评估方法,其特征在于,建立自动驾驶汽车数字孪生测试系统具体包括:
3.根据权利要求1所述的一种自动驾驶汽车安全性等级评估方法,其特征在于,设计多元且真实的测试场景,使用sumo在虚拟孪生测试环境中生成测试车辆或车流,针对可能出现的不同交通情况以及不同的测试场景进行大量的测试,利用自动驾驶汽车数字孪生测试系统,实时精准地获取安全性评估所需要环境感知水平、规划决策水平、动作执行水平、道路交通水平和外部环境水平安全性指标的对应数据,并以碰撞时间的倒数为危险阈值,筛选得到危险测试用例。
4.根据权利要求3所述的一种自动驾驶汽车安全性等级评估方法,其特征在于,碰撞时间的倒数ttc-1>0.7s-1。
5.根据权利要求1所述的一种自动驾驶汽车安全性等级评估方法,其特征在于,构建基于贝叶斯网络结构的车辆-交通-环境博弈模型包括:
6.根据权利要求5所述的一种自动驾驶汽车安全性等级评估方法,其特征在于,父节点a包含n个状态,子节点b包含m个状态,a和b的条件概率为:
7.根据权利要求6所述的一种自动驾驶汽车安全性等级评估方法,其特征在于,由于a、b之间的关系为独立的,边缘概率可由以下公式求解:
8.根据权利要求1所述的一种自动驾驶汽车安全性等级评估方法,其特征在于,所述安全性指数e用于刻画自动驾驶汽车当前的安全性,安全性指数
9.根据权利要求1所述的一种自动驾驶汽车安全性等级评估方法,其特征在于,行驶安全性通过行驶过程中自动驾驶系统的环境感知水平、动作执行水平、车辆运行状态水平以及外部因素的道路交通水平、外部环境水平共同确定。
10.一种自动驾驶汽车安全性等级评估系统,其特征在于,包括预处理模块和评估模块;
技术总结
本发明公开了一种自动驾驶汽车安全性等级评估方法及系统,创建了一个基于数字孪生的智能网联汽车测试环境,提供了多样的测试场景,并使用高速率、低延迟的通信系统保证数据实时性,以贴近真实交通道路环境;多元的测试指标不单单只考虑自动驾驶汽车本身的安全性相关因素,也考虑了外部因素对自动驾驶汽车安全性造成影响的因素,测试指标更加的全面;在测试系统中进行反复大量的测试,分析各个指标之间存在的关联性、确定网络拓扑结构、连通性,建立基于车辆‑环境‑交通博弈的自动驾驶汽车安全等级评估模型,并通过贝叶斯网络结构确定指标的敏感系数;最后引入安全性指数用于实现自动驾驶汽车安全性指标的量化评估。
技术研发人员:田彬,尹志豪,徐志刚,朱宇,赵祥模
受保护的技术使用者:长安大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!