一种目标追踪方法、系统、电子设备及存储介质
本发明涉及计算机,尤其是一种目标追踪方法、系统、电子设备及存储介质。
背景技术:
1、近年来,得益于计算机视觉的飞速发展,作为计算机视觉领域的核心之一的目标追踪也因此越来越受到重视。然而,在当前的目标追踪算法中,往往在目标被遮挡的场景和长期追踪导致的尺度变换和累计偏移中表现欠佳。
2、而针对这些问题,学界提出了基于深度学习的追踪方法。较早时期的目标跟踪算法主要是根据目标建模或者对目标特征进行跟踪。根据目标建模的方法需要对目标外观模型进行建模,在之后的帧序列中找到目标,其中的代表算法则是光流法。对目标特征进行追踪的方法则是利用特征匹配法,首先提取目标特征,随后在后续的帧中找到最相似的特征进行定位。
3、而后有人提出了一种多实例学习算法(mil),通过对所有不明确的阴性和阳性样本进行打包来开发一个判别模型。而后,又有人提出了与通信领域相结合的基于相关滤波的跟踪算法,在这些算法里面,kcf和mosse算法以其高实时性而著称,csrt算法则是展现了高精度。与此同时,又有学者将跟踪的最终任务分解为跟踪、学习和检测(tld)子任务,其中跟踪和检测相互加强,从而提出了tld算法。
4、随着与深度学习领域的结合,目标追踪算法又有了一次飞跃式的进步,siamrpn系列追踪算法,通过孪生网络的设计大幅增加了其追踪的准确性。
5、但是在实际应用中,上述算法虽然能够实现最大功率点追踪,但也存在着各自的不足之处,主要有:
6、(1)光流法和特征匹配法:这些算法由于没有将背景信息考虑在内,导致在目标遮挡,光照变化以及运动模糊等干扰下容易出现跟踪失败。同时算法执行速度慢,无法满足实时性的要求。
7、(2)mil、kcf、tld、mosse算法在含有目标遮挡和由于长期追踪导致尺度变换和累计偏移的情况中表现欠佳,而csrt算法的精确性与功耗相当依赖目标的框选,健壮性较低。
8、(3)以siamrpn为代表的纯深度学习的算法对运行设备的要求较高,在低性能设备,如手机、平板或部分低价格的芯片中占用cpu和内存过高,基本难以运行,无法很好投入工业应用。
9、这些方法对计算设备性能要求较高,因此使得实际投入成本偏高。同时,对于无人机、机器人等使用轻量级计算设备的对象而言,其设备性能的制约使得他们较难应用深度学习的方法实时的进行目标追踪。
技术实现思路
1、有鉴于此,本发明实施例提供一种准确率高、实时性强、设备性能要求低的目标追踪方法、系统、电子设备和存储介质。
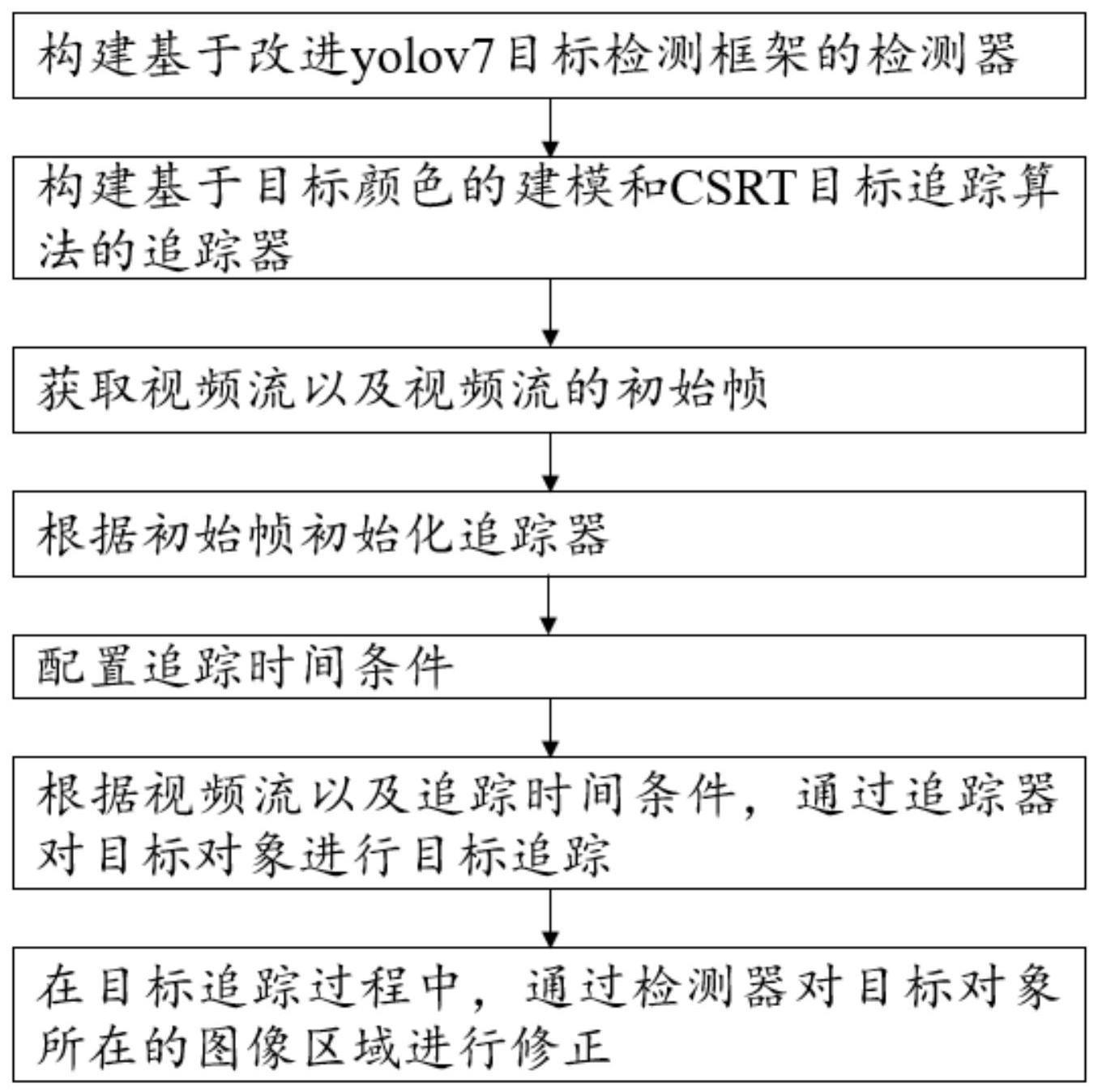
2、本发明实施例提供了一种目标追踪方法,包括:构建基于改进yolov7目标检测框架的检测器;其中,改进的yolov7目标检测框架具有16层主干网络;构建基于目标颜色的建模和csrt目标追踪算法的追踪器;获取视频流以及所述视频流的初始帧;根据所述初始帧初始化所述追踪器;配置追踪时间条件;其中,所述追踪时间条件包括追踪计时器以及搜寻时限;根据所述视频流以及所述追踪时间条件,通过所述追踪器对所述目标对象进行目标追踪;在目标追踪过程中,通过所述检测器对所述目标对象所在的图像区域进行修正。
3、可选地,所述构建基于改进yolov7目标检测框架的检测器,包括:采用改进的yolov7目标检测框架构建改进yolov7模型;其中,所述改进yolov7模型具有16层主干网络;对所述改进yolov7模型进行模型训练,得到目标检测模型;结合动态学习机制和所述目标检测模型构建检测器。
4、可选地,所述配置所述追踪器,包括:截取所述视频流的初始帧;确定目标对象所在的目标区域;根据所述初始帧和所述目标区域,通过所述检测器确定目标对象轮廓;根据所述初始帧和所述目标对象轮廓初始化所述追踪器。
5、可选地,所述根据所述视频流以及所述追踪时间条件,通过所述追踪器对所述目标对象进行目标追踪,包括以下至少之一:当目标对象不存在,则保存最后存在所述目标对象的图像帧中的目标模型,开启搜寻时限计时,通过所述检测器对搜寻时限内的图像帧进行目标检测,直至检测到所述目标对象或搜寻时限已到;当目标对象存在且追踪计时器结束,则通过所述检测器的目标修正函数对所述图像帧进行目标修正并重置所述追踪计时器,重置所述追踪计时器后通过所述追踪器继续对所述目标对象进行目标追踪;当目标对象存在且追踪计时器未结束,则通过所述追踪器对所述目标对象持续进行目标追踪。
6、可选地,所述通过所述检测器对搜寻时限内的图像帧进行目标检测,直至检测到所述目标对象或搜寻时限已到,包括:当检测到所述目标对象,则停止搜寻时间计时,通过所述追踪器对所述目标对象继续进行追踪;当搜寻时限已到,则发出异常警报,停止目标追踪。
7、可选地,所述方法还包括:根据所述目标追踪的目标区域变化情况修正所述目标模型。
8、可选地,所述通过追踪器对所述目标对象进行目标追踪,还包括:获取图像帧之间的目标区域移动信息;通过所述目标区域的移动信息预测所述目标区域在下一图像帧中的位置。
9、本发明的实施例还提供了一种目标追踪系统,其特征在于,包括:第一模块,所述第一模块用于构建基于改进yolov7目标检测框架的检测器;其中,改进的yolov7目标检测框架具有16层主干网络,所述检测器用于对目标对象的所在区域进行修正;第二模块,所述第二模块用于构建基于目标颜色的建模和csrt目标追踪算法的追踪器;第三模块,所述第三模块用于获取视频流以及所述视频流的初始帧;第四模块,所述第四模块用于根据所述初始帧初始化所述追踪器;第五模块,所述第五模块用于配置追踪时间条件;其中,所述追踪时间条件包括追踪计时器以及搜寻时限;第六模块,所述第六模块用于根据所述视频流以及所述追踪时间条件,通过所述追踪器对所述目标对象进行目标追踪。第七模块,所述第七模块用于在目标追踪过程中,通过所述检测器对所述目标对象所在的图像区域进行修正。
10、本发明的实施例还提供了一种电子设备,包括处理器以及存储器;所述存储器用于存储所述程序;所述处理器执行程序实现如上所述的方法。
11、本发明的实施例还提供了一种计算机可读存储介质,所述存储介质存储有程序,所述程序被处理器执行实现如上所述的方法。
12、本发明的实施例具有如下有益效果:通过在目标追踪过程中采用检测器对目标进行修正,能够防止长时间追踪而导致追踪框偏移的问题。此外,对yolov7目标检测框架的改进,使得其具有轻量的16层主干网络,使得模型能在保证提取特征丰富性以及检测准确度的情况下,模型整体更轻量化,能够在设备性能较低以及设备算力较低的情况下进行实时目标追踪;基于目标颜色的建模能够减少在目标追踪过程中跟随错误目标的可能性。
技术特征:
1.一种目标追踪方法,其特征在于,包括:
2.根据权利要求1所述的一种目标追踪方法,其特征在于,所述构建基于改进yolov7目标检测框架的检测器,包括:
3.根据权利要求1所述的一种目标追踪方法,其特征在于,所述配置所述追踪器,包括:
4.根据权利要求1所述的一种目标追踪方法,其特征在于,所述根据所述视频流以及所述追踪时间条件,通过所述追踪器对所述目标对象进行目标追踪,包括以下至少之一:
5.根据权利要求4所述的一种目标追踪方法,其特征在于,所述通过所述检测器对搜寻时限内的图像帧进行目标检测,直至检测到所述目标对象或搜寻时限已到,包括:
6.根据权利要求4所述的一种目标追踪方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的一种目标追踪方法,其特征在于,所述通过追踪器对所述目标对象进行目标追踪,还包括:
8.一种目标追踪系统,其特征在于,包括:
9.一种电子设备,其特征在于,包括处理器以及存储器;
10.一种计算机可读存储介质,其特征在于,所述存储介质存储有程序,所述程序被处理器执行实现如权利要求1至7中任一项所述的方法。
技术总结
本发明公开了一种目标追踪方法、系统、电子设备及存储介质,通过在目标追踪过程中采用检测器对目标进行修正,能够防止长时间追踪而导致追踪框偏移的问题。此外,对yolov7目标检测框架的改进,使得其具有轻量的16层主干网络,使得模型能在保证提取特征丰富性以及检测准确度的情况下,模型整体更轻量化,能够在设备性能较低以及设备算力较低的情况下进行实时目标追踪;基于目标颜色的建模能够减少在目标追踪过程中跟随错误目标的可能性。本发明的实施例能够广泛应用于计算机技术领域。
技术研发人员:梁军,周诺,龙嘉濠,骆锐
受保护的技术使用者:华南师范大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!