一种基于深度学习的树木倒伏及道路障碍物识别监测系统的制作方法
本发明涉及路况监测,具体为一种基于深度学习的树木倒伏及道路障碍物识别监测系统。
背景技术:
1、随着交通行业不断发展,高速公路线路越来越多,覆盖范围越来越广,而日车辆的行驶安全性要求也越来越高,安全管理是高速公路建设和运行管理过程中的重要内容,也是促进高速公路建设运营工作持续开展下去的重要措施;
2、由于高速公路路线较长,所跨越的地域也是不同的,尤其在山区路段很多路边都有树木,如果路边的树木发生倒塌或者路面上散落有障碍物,而后面高速行使的车辆不能在第一时间发现问题,则就无法在第一时间进行判断处理,如果不能提前发生并进行处理,就会引发交通事故的问题甚至安全事故的问题,同时不能在第一时间对倒塌的树木和散落的障碍物进行处理,使该路段还是存在安全隐患的问题,并且路边的移动监测设备,由于长时间的暴露在外部,当监测设备外部积累有污垢或者被行使的车辆溅上污垢,就不能继续进行监测作业甚至使监测到的信息不够准确,造成后期出现误判的情况。
技术实现思路
1、本发明的目的在于提供一种基于深度学习的树木倒伏及道路障碍物识别监测系统,以解决上述背景技术中提出的问题。
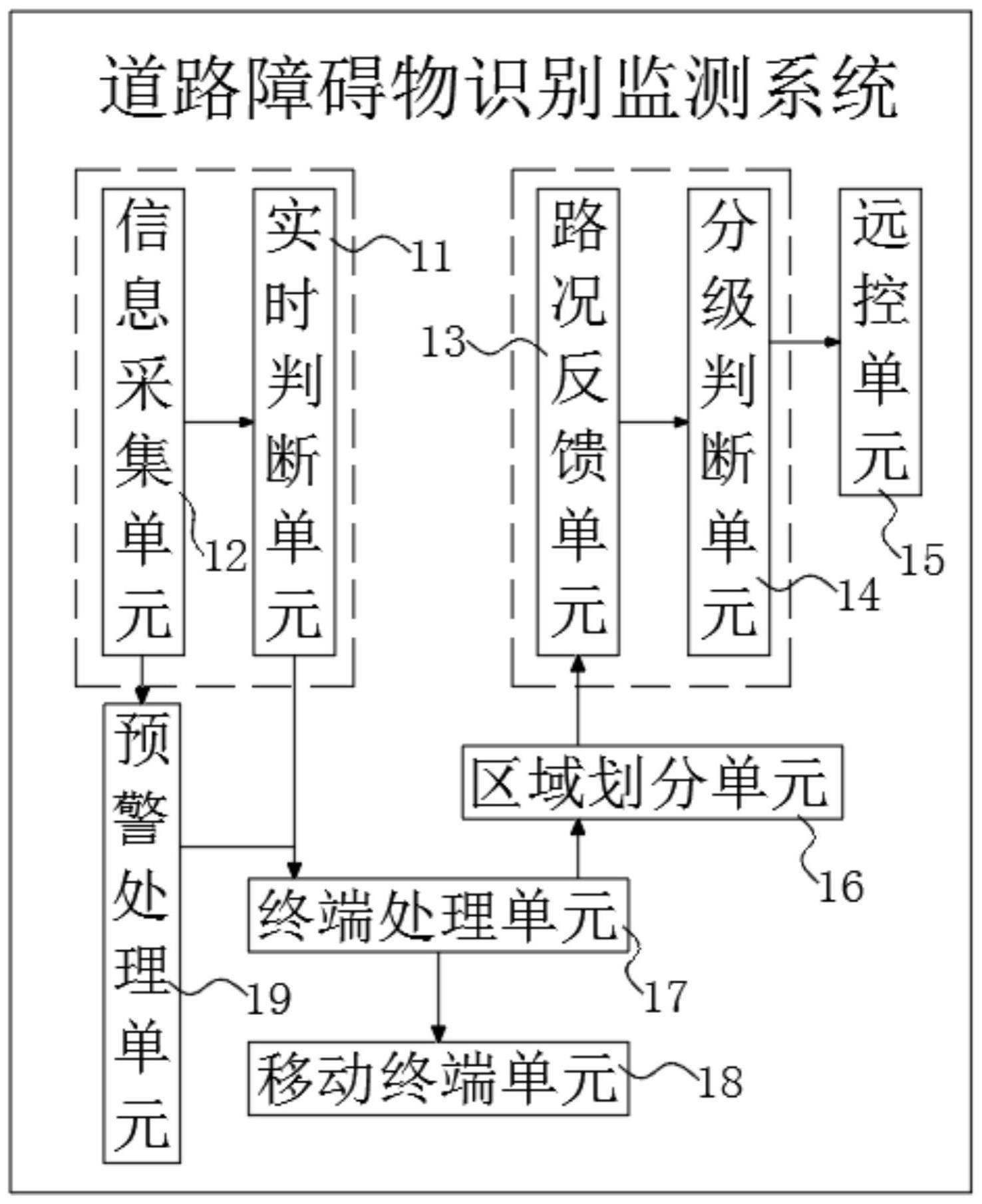
2、为实现上述目的,本发明提供如下技术方案:一种基于深度学习的树木倒伏及道路障碍物识别监测系统,包括实时判断单元、信息采集单元、路况反馈单元、分级判断单元、远控单元、区域划分单元、终端处理单元、移动终端单元和预警处理单元;
3、信息采集单元,所述信息采集单元对指定路段的路面进行实时的监测,并对路面和路况信息进行采集,当监测路面的路况发生异常时,就会把采集到的信息直接传输到实时判断单元,通过实时判断单元对接收的路面信息进行确认判断,判断该路段是否发生异常,并把判断后的信息直接发送到终端处理单元,再由终端处理单元把信息直接传输给移动终端单元,告诉正在行使的移动终端单元前方的路况异常,需要提前进行判断;
4、区域划分单元,通过区域划分单元对整条道路进行划分,并划分出不同的路段,当其中某一处路段路面发生异常时,就可以直接抵达发生异常的路段,且把路面异常信息传输给终端处理单元后,就会直接传输到区域划分单元,通过区域划分单元把哪个区域路段的消息直接传送给路况反馈单元,通过路况反馈单元对路况的信息进行整合判断,并把整合后的信息直接传输到分级判断单元,通过提前在分级判断单元里面设定不同的等级,当接收到信息后通过对路况的判断,对发生路况的等级进行划分,并把划分后的路况性质发送到远控单元,告诉工作人员哪条路段发生异常需要处理,并告诉工作人员路况异常信息的等级,可以根据提前知晓的等级情况,合理的安全处理的方案已经携带处理的器械。
5、优选的,所述预警处理单元对信息采集单元采集到的第一路况信息进行接收,并通过预警处理单元直接把发给终端处理单元,再通过终端处理单元把信息发送给移动终端单元,通过预警处理单元第一时间告诉行使的移动终端单元路况发生异常需要注意。
6、优选的,所述信息采集单元还包括移动摄像机和护栏板,所述护栏板左侧开设有移动长槽,所述移动摄像机位于移动长槽内部,所述护栏板安装在路边,所述移动摄像机左侧中部通过螺栓安装有镜头;
7、处理机构,所述处理机构活动安装在镜头左侧中部,所述移动摄像机顶端通过螺栓安装有移动机构;
8、定时触发机构,所述定时触发机构通过螺栓安在移动摄像机右侧上端前侧,所述移动摄像机前侧上端活动安装有往复转动机构。
9、优选的,所述处理机构包括储液框、连接软管、活动条和清理刷,所述储液框通过螺栓安装在移动摄像机顶端,所述活动条活动安装在镜头左侧,所述清理刷通过螺栓安装在活动条右侧,所述活动条内部呈空心结构,所述连接软管通过螺栓安装在储液框左侧中部底端,所述连接软管且远离储液框的一端与活动条右侧中部上端通过螺栓连接,所述活动条右侧等距开设有若干渗孔,所述活动条右侧上端开设有输送通孔,所述储液框内部添加有清理液。
10、优选的,所述移动机构包括移动滑槽和移动车体,所述移动滑槽开设在移动长槽内部顶端,所述移动车体通过螺栓安装在储液框顶端,所述移动车体顶端与移动滑槽内部活动连接,所述移动滑槽截面呈倒凸型结构,所述移动车体配设有遥控开关。
11、优选的,所述定时触发机构包括固定斜块、活动推块、固定框头、复位弹簧和挤压气囊,所述固定框头通过螺栓安装在储液框右侧底端前侧,所述活动推块活动安装在固定框头右侧端,若干个所述固定斜块通过螺栓等距安装在移动长槽右侧中上端,所述挤压气囊通过螺栓安装在活动推块左侧与固定框头内部左侧,所述复位弹簧通过螺栓安装在活动推块左侧与固定框头内部左侧,所述复位弹簧位于挤压气囊外部,所述挤压气囊顶端左侧与储液框右侧上端通过螺栓安装有气管。
12、优选的,所述往复转动机构包括推拉杆、转动块、弧形长槽和转动杆,所述推拉杆通过螺栓安装在活动推块底端左侧中部,所述转动块通过轴承活动安装在移动摄像机前端右侧上端,所述推拉杆呈l型结构,所述弧形长槽开设在转动块外部四周,所述推拉杆底端左侧后端通过轴承活动安装有转块,且转块与弧形长槽内部右侧对接,所述转动杆通过螺栓安装在转动块左侧中部,所述转动杆左侧端通过螺栓与活动条右侧上端连接。
13、优选的,所述固定斜块俯视呈锥形结构,所述活动推块右侧端活动安装有圆珠,所述活动推块左侧侧视呈圆形结构,所述活动推块外部左侧等距活动安装有若干滚珠,所述固定框头底端中部开设有移动通槽,所述复位弹簧采用弹簧钢材质制成。
14、与现有技术相比,本发明的有益效果是:
15、1、本发明在使用的过程中,通过信息采集单元对指定路段的路面进行实时的监测,并对路面和路况信息进行采集,当监测路面的路况发生异常时,比如有倾倒的树木以及路面上有障碍物后,就会把采集到的信息直接传输到实时判断单元,通过实时判断单元对接收的路面信息进行确认判断,判断该路段是否发生异常,并把判断后的信息直接发送到终端处理单元,再由终端处理单元把信息直接传输给移动终端单元,告诉正在行使的移动终端单元前方的路况异常,需要行使的车辆提前进行判断,防止在路面发生异常时,正在行使的车辆不能在第一时间发现异常,还在快速的行驶引发交通安全事故的问题;
16、2、本发明同时在启动移动机构带动移动摄像机移动监测,移动的同时触发定时触发机构,通过定时触发机构先启动处理机构和往复转动机构,通过移动摄像机不仅可以对划分路段进行实时的监测,还可以增加监测过程中的可靠性和稳定性,同时在移动过程中,定时的对镜头外部进行处理,可以增加监测过程中的清晰度,降低在监测过程中出现画面模糊不清的情况,防止在监测的过程中,镜头外部沾染时污垢或者被行使的车辆溅上了污垢,造成监测时产生的数据不够准确,则就不能准确的判断路面可能倾倒的树木以及障碍物的情况,并使后期造成误判导致交通安全事故的问题。
技术特征:
1.一种基于深度学习的树木倒伏及道路障碍物识别监测系统,其特征在包括实时判断单元(11)、信息采集单元(12)、路况反馈单元(13)、分级判断单元(14)、远控单元(15)、区域划分单元(16)、终端处理单元(17)、移动终端单元(18)和预警处理单元(19);
2.根据权利要求1所述的一种基于深度学习的树木倒伏及道路障碍物识别监测系统,其特征在于:所述预警处理单元(19)对信息采集单元(12)采集到的第一路况信息进行接收,并通过预警处理单元(19)直接把发给终端处理单元(17),再通过终端处理单元(17)把信息发送给移动终端单元(18),通过预警处理单元(19)第一时间告诉行使的移动终端单元(18)路况发生异常需要注意。
3.根据权利要求1所述的一种基于深度学习的树木倒伏及道路障碍物识别监测系统,其特征在于:所述信息采集单元(12)还包括移动摄像机(5)和护栏板(1),所述护栏板(1)左侧开设有移动长槽(6),所述移动摄像机(5)位于移动长槽(6)内部,所述护栏板(1)安装在路边,所述移动摄像机(5)左侧中部通过螺栓安装有镜头(4);
4.根据权利要求3所述的一种基于深度学习的树木倒伏及道路障碍物识别监测系统,其特征在于:所述处理机构(3)包括储液框(301)、连接软管(302)、活动条(303)和清理刷(304),所述储液框(301)通过螺栓安装在移动摄像机(5)顶端,所述活动条(303)活动安装在镜头(4)左侧,所述清理刷(304)通过螺栓安装在活动条(303)右侧,所述活动条(303)内部呈空心结构,所述连接软管(302)通过螺栓安装在储液框(301)左侧中部底端,所述连接软管(302)且远离储液框(301)的一端与活动条(303)右侧中部上端通过螺栓连接,所述活动条(303)右侧等距开设有若干渗孔,所述活动条(303)右侧上端开设有输送通孔,所述储液框(301)内部添加有清理液。
5.根据权利要求4所述的一种基于深度学习的树木倒伏及道路障碍物识别监测系统,其特征在于:所述移动机构(2)包括移动滑槽(201)和移动车体(202),所述移动滑槽(201)开设在移动长槽(6)内部顶端,所述移动车体(202)通过螺栓安装在储液框(301)顶端,所述移动车体(202)顶端与移动滑槽(201)内部活动连接,所述移动滑槽(201)截面呈倒凸型结构,所述移动车体(202)配设有遥控开关。
6.根据权利要求4所述的一种基于深度学习的树木倒伏及道路障碍物识别监测系统,其特征在于:所述定时触发机构(7)包括固定斜块(701)、活动推块(702)、固定框头(703)、复位弹簧(704)和挤压气囊(705),所述固定框头(703)通过螺栓安装在储液框(301)右侧底端前侧,所述活动推块(702)活动安装在固定框头(703)右侧端,若干个所述固定斜块(701)通过螺栓等距安装在移动长槽(6)右侧中上端,所述挤压气囊(705)通过螺栓安装在活动推块(702)左侧与固定框头(703)内部左侧,所述复位弹簧(704)通过螺栓安装在活动推块(702)左侧与固定框头(703)内部左侧,所述复位弹簧(704)位于挤压气囊(705)外部,所述挤压气囊(705)顶端左侧与储液框(301)右侧上端通过螺栓安装有气管。
7.根据权利要求4所述的一种基于深度学习的树木倒伏及道路障碍物识别监测系统,其特征在于:所述往复转动机构(8)包括推拉杆(801)、转动块(802)、弧形长槽(803)和转动杆(804),所述推拉杆(801)通过螺栓安装在活动推块(702)底端左侧中部,所述转动块(802)通过轴承活动安装在移动摄像机(5)前端右侧上端,所述推拉杆(801)呈l型结构,所述弧形长槽(803)开设在转动块(802)外部四周,所述推拉杆(801)底端左侧后端通过轴承活动安装有转块,且转块与弧形长槽(803)内部右侧对接,所述转动杆(804)通过螺栓安装在转动块(802)左侧中部,所述转动杆(804)左侧端通过螺栓与活动条(303)右侧上端连接。
8.根据权利要求7所述的一种基于深度学习的树木倒伏及道路障碍物识别监测系统,其特征在于:所述固定斜块(701)俯视呈锥形结构,所述活动推块(702)右侧端活动安装有圆珠(9),所述活动推块(702)左侧侧视呈圆形结构,所述活动推块(702)外部左侧等距活动安装有若干滚珠,所述固定框头(703)底端中部开设有移动通槽(10),所述复位弹簧(704)采用弹簧钢材质制成。
技术总结
本发明公开了一种基于深度学习的树木倒伏及道路障碍物识别监测系统,涉及路况监测技术领域,包括实时判断单元、信息采集单元、路况反馈单元、分级判断单元、远控单元、区域划分单元、终端处理单元、移动终端单元和预警处理单元。本发明通过实时判断单元对接收的路面信息进行确认判断,判断该路段是否发生异常,并把判断后的信息直接发送到终端处理单元,再由终端处理单元把信息直接传输给移动终端单元,告诉正在行使的移动终端单元前方的路况异常,需要行使的车辆提前进行判断,防止在路面发生异常时,正在行使的车辆不能在第一时间发现异常,还在快速的行驶引发交通安全事故的问题。
技术研发人员:王东升,赖纪云,郑曙辉
受保护的技术使用者:广东北控数字信息有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!