城市实景三维模型的构建方法、装置、设备及存储介质与流程
本发明涉及三维建模,尤其涉及一种城市实景三维模型的构建方法、装置、终端设备及计算机可读存储介质。
背景技术:
1、近年来,随着倾斜摄影技术的不断发展,“数字城市”的建设已成为城市运行管理的必然,而数字城市建设的基础是城市实景三维模型。目前的实景三维模型生成方式主要是如中国专利文献cn114332382b公开的一种基于无人机贴近摄影测量的三维模型制作方法所示的小范围的模型重建,首先利用无人机获取目标区域照片,然后基于照片进行整体的空中三角测量,最后基于空中三角测量结果进行实景三维模型重建。但是,由于在城市级的场景中,建模区域较大,空中三角测量所需计算的照片数量多且地表类型,从而导致空中三角测量的耗时较长,对城市实景三维模型的生成速度造成影响。
技术实现思路
1、本发明提供一种城市实景三维模型的构建方法、装置、终端设备以及计算机可读存储介质,能够提高城市级场景下空中三角测量效率,以提高城市实景三维模型的生成速度。
2、本发明实施例提供了一种城市实景三维模型的构建方法,包括:
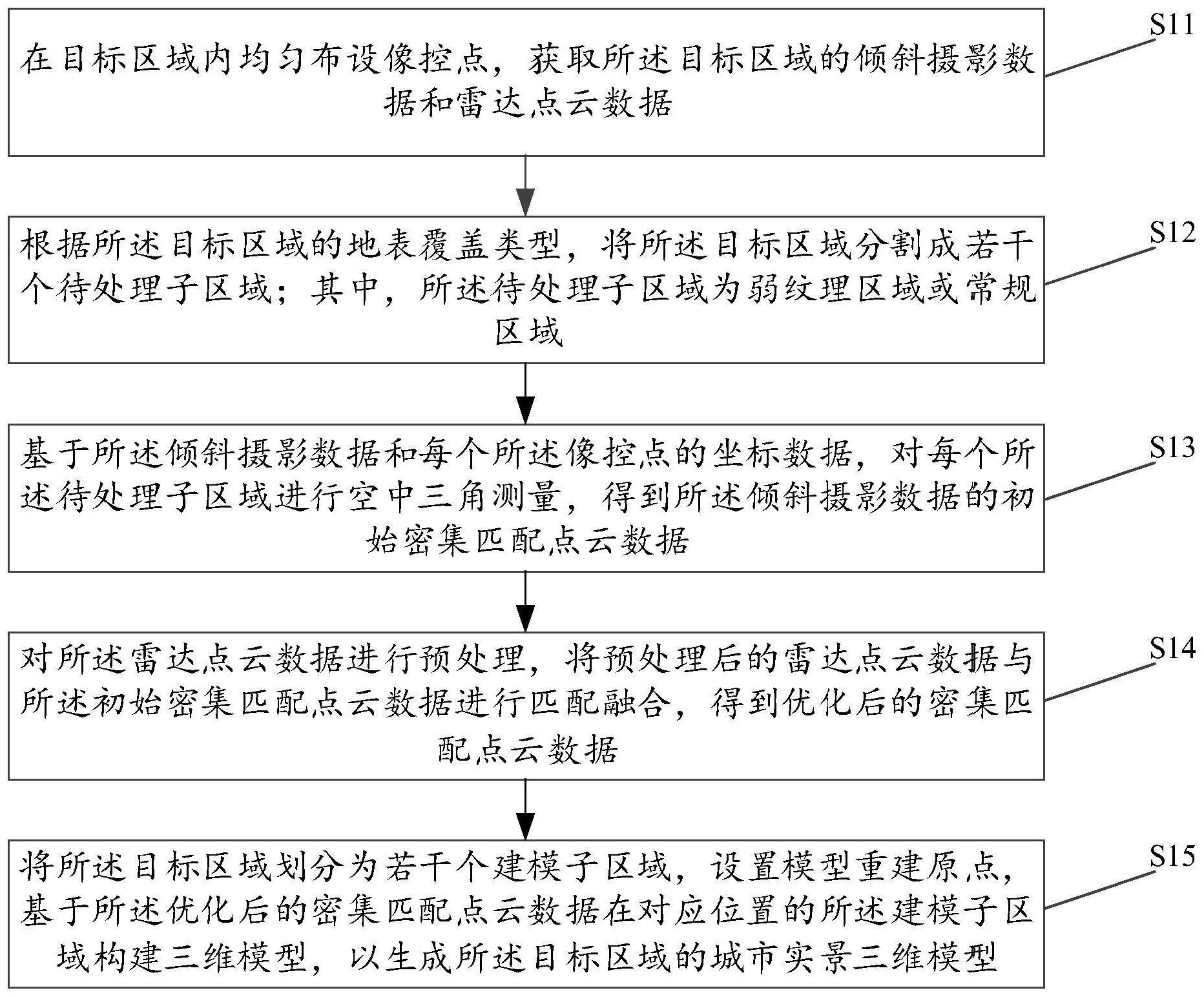
3、在目标区域内均匀布设像控点,获取所述目标区域的倾斜摄影数据和雷达点云数据;
4、根据所述目标区域的地表覆盖类型,将所述目标区域分割成若干个待处理子区域;其中,所述待处理子区域为弱纹理区域或常规区域;
5、基于所述倾斜摄影数据和每个所述像控点的坐标数据,对每个所述待处理子区域进行空中三角测量,得到所述倾斜摄影数据的初始密集匹配点云数据;
6、对所述雷达点云数据进行预处理,将预处理后的雷达点云数据与所述初始密集匹配点云数据进行匹配融合,得到优化后的密集匹配点云数据;
7、将所述目标区域划分为若干个建模子区域,设置模型重建原点,基于所述优化后的密集匹配点云数据在对应位置的所述建模子区域构建三维模型,以生成所述目标区域的城市实景三维模型。
8、作为上述方案的改进,在所述基于所述倾斜摄影数据和每个所述像控点的坐标数据,对每个所述待处理子区域进行空中三角测量,得到所述倾斜摄影数据的初始密集匹配点云数据之前,所述方法还包括:
9、将所述倾斜摄影数据按照pos位置进行排列,并叠加每个所述像控点的坐标数据。
10、作为上述方案的改进,所述基于所述倾斜摄影数据和每个所述像控点的坐标数据,对每个所述待处理子区域进行空中三角测量,得到所述倾斜摄影数据的初始密集匹配点云数据,包括:
11、基于所述倾斜摄影数据和每个所述像控点的坐标数据,通过sift算法对每个所述待处理子区域进行特征点提取和特征点匹配,生成每个所述待处理子区域的匹配点;
12、对每个所述待处理子区域的匹配点进行粗差点剔除,得到每个所述待处理子区域的自由网;
13、对每个所述待处理子区域的自由网进行合并,在合并后的自由网上导入每个所述像控点的坐标数据进行光束法区域网平差,得到所述倾斜摄影数据的初始密集匹配点云数据。
14、作为上述方案的改进,在所述通过sift算法对每个所述待处理子区域进行特征点提取的过程中,若所述待处理子区域为弱纹理区域,则由所述sift算法生成的特征点的描述子为第一维度的特征向量;若所述待处理子区域为常规区域,则由所述sift算法生成的特征点的描述子为第二维度的特征向量;其中,所述第一维度大于所述第二维度。
15、作为上述方案的改进,所述对所述雷达点云数据进行预处理,将预处理后的雷达点云数据与所述初始密集匹配点云数据进行匹配融合,得到优化后的密集匹配点云数据,包括:
16、对所述雷达点云数据进行预处理,将预处理后的雷达点云数据与所述初始密集匹配点云数据进行配准,并通过所述预处理后的雷达点云数据将所述初始密集匹配点云数据中的粗差点剔除,得到待融合密集匹配点云数据;
17、将所述预处理后的雷达点云数据与所述待融合密集匹配点云数据进行融合优化,得到优化后的密集匹配点云数据。
18、作为上述方案的改进,相邻的所述待处理子区域之间存在重叠面积,所述重叠面积内设有公共的所述像控点。
19、作为上述方案的改进,每个所述建模子区域设有一个建模坐标系。
20、相应地,本发明另一实施例提供一种城市实景三维模型的构建装置,包括:
21、数据获取模块,用于在目标区域内均匀布设像控点,获取所述目标区域的倾斜摄影数据和雷达点云数据;
22、空中三角分块模块,用于根据所述目标区域的地表覆盖类型,将所述目标区域分割成若干个待处理子区域;其中,所述待处理子区域为弱纹理区域或常规区域;
23、空中三角测量模块,用于基于所述倾斜摄影数据和每个所述像控点的坐标数据,对每个所述待处理子区域进行空中三角测量,得到所述倾斜摄影数据的初始密集匹配点云数据;
24、密集匹配点云优化模块,用于对所述雷达点云数据进行预处理,将预处理后的雷达点云数据与所述初始密集匹配点云数据进行匹配融合,得到优化后的密集匹配点云数据;
25、城市实景模型生成模块,用于将所述目标区域划分为若干个建模子区域,设置模型重建原点,基于所述优化后的密集匹配点云数据在对应位置的所述建模子区域构建三维模型,以生成所述目标区域的城市实景三维模型。
26、本发明另一实施例提供一种终端设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现如上任意一项所述的城市实景三维模型的构建方法。
27、本发明另一实施例提供一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如上任意一项所述的城市实景三维模型的构建方法。
28、与现有技术相比,本发明实施例公开的城市实景三维模型的构建方法、装置、终端设备及计算机存储介质,本发明在对所述目标区域进行空中三角测量之前,预先将待空中三角测量区域划分为若干个待处理子区域,分别对每个所述待处理子区域进行空中三角测量,因此,能够提高城市级场景下空中三角测量效率。同时,在获取到所述倾斜摄影数据的初始密集匹配点云数据之后,还进一步通过预处理后的雷达点云数据,优化所述初始密集匹配点云数据,得到优化后的密集匹配点云数据,以提高所述城市实景三维模型的生成质量。此外,本发明在生成所述目标区域的城市实景三维模型的过程中,将所述目标区域划分为若干个建模子区域,设置模型重建原点,基于所述优化后的密集匹配点云数据在对应位置的所述建模子区域构建三维模型,以生成所述目标区域的城市实景三维模型,因此,能够进一步提高城市实景三维模型的生成速度。
技术特征:
1.一种城市实景三维模型的构建方法,其特征在于,包括:
2.如权利要求1所述的城市实景三维模型的构建方法,其特征在于,在所述基于所述倾斜摄影数据和每个所述像控点的坐标数据,对每个所述待处理子区域进行空中三角测量,得到所述倾斜摄影数据的初始密集匹配点云数据之前,所述方法还包括:
3.如权利要求1所述的城市实景三维模型的构建方法,其特征在于,所述基于所述倾斜摄影数据和每个所述像控点的坐标数据,对每个所述待处理子区域进行空中三角测量,得到所述倾斜摄影数据的初始密集匹配点云数据,包括:
4.如权利要求3所述的城市实景三维模型的构建方法,其特征在于,在所述通过sift算法对每个所述待处理子区域进行特征点提取的过程中,若所述待处理子区域为弱纹理区域,则由所述sift算法生成的特征点的描述子为第一维度的特征向量;若所述待处理子区域为常规区域,则由所述sift算法生成的特征点的描述子为第二维度的特征向量;其中,所述第一维度大于所述第二维度。
5.如权利要求1所述的城市实景三维模型的构建方法,其特征在于,所述对所述雷达点云数据进行预处理,将预处理后的雷达点云数据与所述初始密集匹配点云数据进行匹配融合,得到优化后的密集匹配点云数据,包括:
6.如权利要求1所述的城市实景三维模型的构建方法,其特征在于,相邻的所述待处理子区域之间存在重叠面积,所述重叠面积内设有公共的所述像控点。
7.如权利要求1所述的城市实景三维模型的构建方法,其特征在于,每个所述建模子区域设有一个建模坐标系。
8.一种城市实景三维模型的构建装置,其特征在于,包括:
9.一种终端设备,其特征在于,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至7中任意一项所述的城市实景三维模型的构建方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如权利要求1至7中任意一项所述的城市实景三维模型的构建方法。
技术总结
本发明公开了一种城市实景三维模型的构建方法、装置、设备及存储介质,方法包括:在目标区域内均匀布设像控点,获取目标区域的倾斜摄影数据和雷达点云数据;根据地表覆盖类型将目标区域分割成若干个待处理子区域;基于倾斜摄影数据和每个像控点的坐标数据,对每个待处理子区域进行空中三角测量,得到初始密集匹配点云数据;将预处理后的雷达点云数据与初始密集匹配点云数据进行匹配融合,得到优化后的密集匹配点云数据;将目标区域划分为若干个建模子区域,基于优化后的密集匹配点云数据在对应的建模子区域构建三维模型。本发明能够提高城市级场景下空中三角测量效率和模型生成速度。
技术研发人员:朱绪鹤,罗宁馨,张蜀军,何华贵,杨卫军,陈朝霞,谢润桦,周中正,叶日晨
受保护的技术使用者:广州市城市规划勘测设计研究院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!