路面检测方法、装置、设备及介质与流程
本申请涉及图像识别,具体地,涉及一种路面检测方法、装置、设备及介质。
背景技术:
1、随着技术水平的发展和汽车的普及,市场对车辆智能化的需求不断增长,智能车辆(intelligent vehicle)的概念随之应运而生,人们希望拥有一种以实现无人、全自动和安全驾驶为最终目标的智能车辆。
2、车辆的辅助驾驶技术是智能车辆的一个重要功能。在辅助驾驶中,快速、准确、稳定的检测路面障碍物是关键技术,而准确的提取道路区域是检测路面障碍物的必要步骤。只有在准确的提取道路区域的前提下,才能准确地检测出路面障碍物。
3、在当前已有的高级驾驶辅助系统中,可以通过对双目摄像头采集到的路况图像,可以对该路况图像进行处理,得到对应的视差图像。根据该视差图像计算得到对应的v视差图,基于v视差图进行路面提取。
4、但是直接利用视差图进行检测,则会由于地面、周围杂物等因素会对判定产生干扰。因此,如何有效提升提取的速度和准确率一直是该领域的研究方向。
技术实现思路
1、为解决上述背景技术中的至少一项技术问题,本申请提供一种路面检测方法、装置、设备及介质,以快准确的从视差图中进行地面获取。
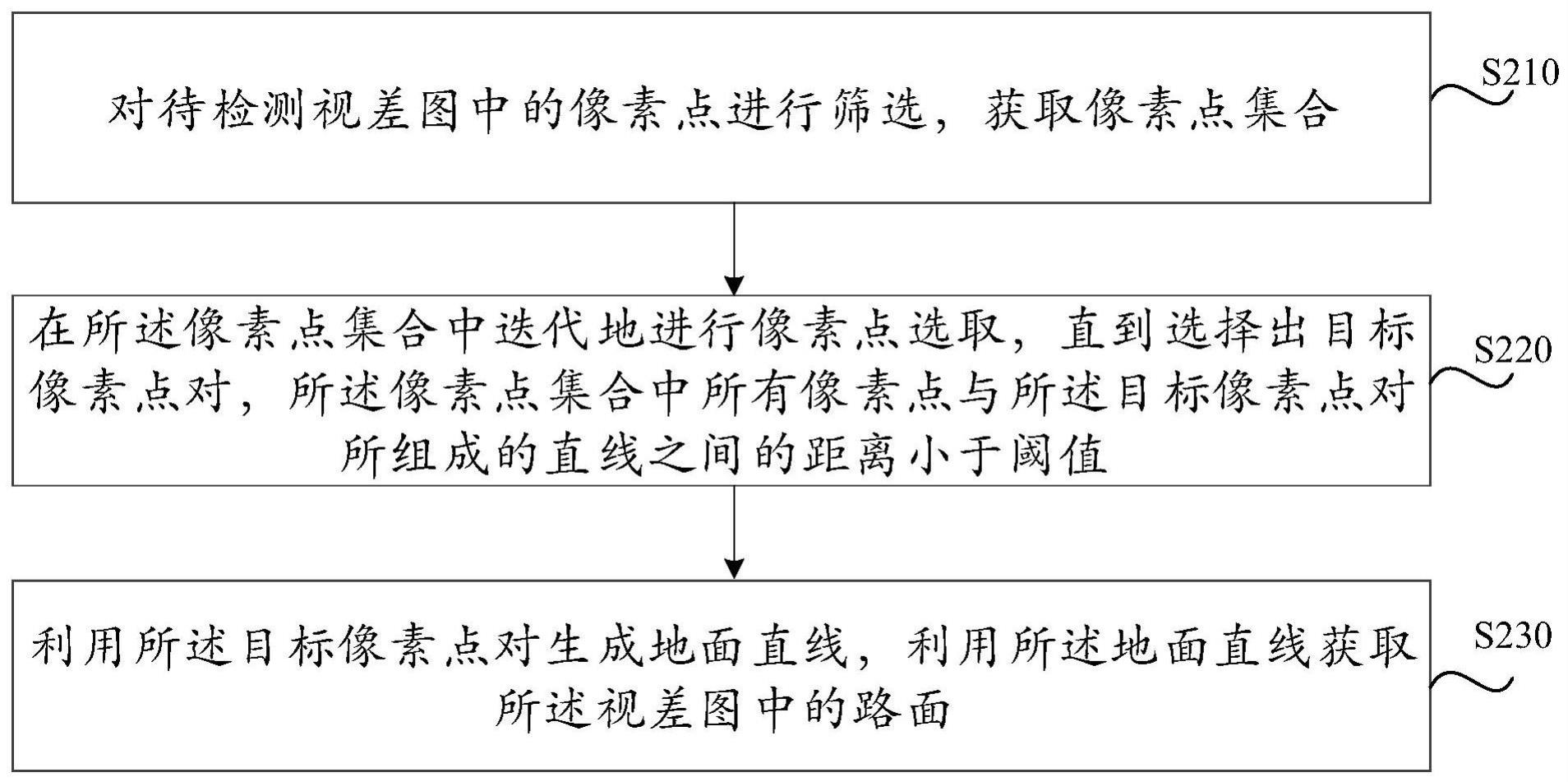
2、本申请第一方面提供一种路面检测方法,所述方法包括:对待检测视差图中的像素点进行筛选,获取像素点集合;在所述像素点集合中迭代地进行像素点选取,直到选择出目标像素点对,所述像素点集合中所有像素点与所述目标像素点对所组成的直线之间的距离小于阈值;利用所述目标像素点对生成地面直线,利用所述地面直线获取所述视差图中的路面。
3、可选地,对待检测视差图中的像素点进行筛选,获取像素点集合,包括:使用一致性滤波器对所述待检测视差图进行滤波,获取滤波图像;去除所述滤波图像中像素值小于指定像素阈值的像素点;根据所述滤波图像中剩余像素点获取所述像素点集合。
4、可选地,所述在所述像素点集合中迭代地进行像素点选取,直到选择出目标像素点对,包括:按照预设的迭代选取方式,对所述像素点集合中的像素点进行迭代选取;所述预设的迭代方式为从当前轮次像素点集合随机提取出两个像素点,依据所提取出的两个像素点生成直线,确定所述像素点集合的每一像素点与所述直线的距离是否均小于距离阈值,若是,则选取所述随机提取出的两个像素点为当前轮次选取的像素点对;在达到预设迭代轮次时,将在所述预设迭代轮次选取的像素点对作为所述目标像素点对。
5、可选地,所述方法还包括:在所述迭代选取中,记录所述像素点集合中存在像素点与直线的距离大于或等于距离阈值的次数;相应地,所述在达到预设迭代轮次时,将在所述预设迭代轮次选取的像素点对作为所述目标像素点对,还包括:确定所述次数大于或等于所述预设迭代轮次,将生成所述次数时选取的像素点对作为所述目标像素点对。
6、可选地,所述预设的迭代选取方式还包括:依据所提取出的两个像素点生成直线后,确定所述直线的斜率是否在预设斜率范围;若所述直线的斜率在所述预设斜率范围,则确定所述当前轮次像素点集合中剩余像素点的每一像素点与所述直线的距离是否均小于距离阈值,若是则选取所述随机提取出的两个像素点为当前轮次选取的像素点对;若所述直线的斜率不在所述预设斜率范围,则按照预设的迭代选取方式,进行下一轮迭代选取。
7、可选地,所述利用所述目标像素点对生成地面直线,包括:依据所述目标像素点对每一像素点的像素坐标,生成直线参数;依据所述直线参数在所述待检测视差图中生成所述地面直线。
8、可选地,所述利用所述地面直线获取所述待检测视差图中的路面,包括:将所述待检测视差图中所述地面直线上方的竖直线去除,根据去除所述竖直线之后的地面直线,生成所述待检测视差图中的路面。
9、本申请第二方面提供一种路面检测装置,所述装置包括:筛选模块,用于对待检测视差图中的像素点进行筛选,获取像素点集合;选取模块,用于在所述像素点集合中迭代地进行像素点选取,直到选择出目标像素点对,所述像素点集合中所有像素点与所述目标像素点对所组成的直线之间的距离小于阈值;生成模块,用于利用所述目标像素点对生成地面直线,利用所述地面直线获取所述视差图中的路面。
10、本申请第三方面提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一方面中任一项所述方法的步骤。
11、本申请第四方面提供一种电子设备,包括:存储器,其上存储有计算机程序;处理器,用于执行所述存储器中的所述计算机程序,以实现上述第一方面中任一项所述方法的步骤。
12、通过上述技术方案,获取待检测视差图中的向量集合,在向量集合中查找目标像素对,通过目标像素对生成地面直线,利用该地面直线获取地面,从而提升了地面提取的准确性。
13、本申请的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种路面检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,对待检测视差图中的像素点进行筛选,获取像素点集合,包括:
3.根据权利要求2所述的方法,其特征在于,所述在所述像素点集合中迭代地进行像素点选取,直到选择出目标像素点对,包括:
4.根据权利要求3所述的方法,其特征在于,所述方法还包括:
5.根据权利要求3或4所述的方法,其特征在于,所述预设的迭代选取方式还包括:
6.根据权利要求1所述的方法,其特征在于,所述利用所述目标像素点对生成地面直线,包括:
7.根据权利要求1所述的方法,其特征在于,所述利用所述地面直线获取所述待检测视差图中的路面,包括:
8.一种路面检测装置,其特征在于,所述装置包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-7中任一项所述方法的步骤。
10.一种电子设备,其特征在于,包括:
技术总结
本申请涉及一种路面检测方法、装置、设备及介质,其中,所述方法包括:对待检测视差图中的像素点进行筛选,获取像素点集合;在所述像素点集合中迭代地进行像素点选取,直到选择出目标像素点对,所述像素点集合中所有像素点与所述目标像素点对所组成的直线之间的距离小于阈值;利用所述目标像素点对生成地面直线,利用所述地面直线获取所述视差图中的路面,上述方法通过目标像素对生成地面直线,利用该地面直线获取地面,从而提升了地面提取的准确性。
技术研发人员:钱苏珂
受保护的技术使用者:西安闻泰信息技术有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!