一种基于BP神经网络和D-S证据理论的地下道路火灾检测方法
本发明属于火灾检测,同时属于数据分析与人工智能领域,特别涉及一种基于bp神经网络和d-s证据理论的地下道路火灾检测方法。
背景技术:
1、随着城市规模的发展,地面土地资源与持续增长的交通需求之间的矛盾日益冲突因此,城市交通向地下空间发展,促进地上道路和地下道路交通功能和谐互补,已经成为国内外大城市的共同发展趋势。然而,地下道路面临着复杂内外环境条件,伴随着地下道路交通量激增,安全运行风险加剧。在各类地下道路灾害中,其中火灾属于地下道路灾害中危害较为严重的,不仅对人员安全有巨大威胁,还会对隧道结构造成严重损伤,目前准确及时地检测到火灾的发生是降低此类灾害风险的有效方法。现在常用的火灾检测方法在特殊复杂场景下其效果并不理想,在检测稳定性、准确性和检测时延方面都难以满足需求。
2、现有的火灾检测方案主要有以下几类:
3、第一种是通过单一类型传感器检测火灾事件。使用的传感器类型通常包括:感温传感器、感烟传感器、火焰探测器。这种方法通过某一类型传感器检测到的单一信号来判断是否发生火灾,传感器结果易受应用环境条件、传感器稳定性等因素影响,容易引发虚警,准确性较差。
4、第二种是通过视觉传感器检测火灾事件。此类方法主要依靠视觉传感器与人工智能算法结合来识别是否发生火灾。在复杂场景火灾事件应用场景下,通常会面临三大问题,其一相关灾情数据不易采集,人工智能算法在缺乏对应场景数据集的条件下可靠性会大大降低;其二视觉传感器的布设方式受应用场景环境影响很大,视监测场景的空间、观测点事件,往往需要布设多个传感器监测一处地点;其三图像分类的人工智能算法要达到实时性对硬件算力有较高的要求,而且在需要同时处理多源传感器检测到的结果的事件下,对硬件要求进一步提高。所以在复杂应用场景下此类方法实际的可行性不高。
5、第三种是通过多传感器数据融合来检测火灾事件。目前传统传感器技术已经十分先进,且在公共场合一般都布设有大量各类型的传感器,因此此类方法的可行性较高。但当前已有的大多方法是针对建筑物内、森林、各种安全作业工作环境等应用场景提出的,在地下道路场景下的适用性较差。其次目前已有的数据融合检测方案在数据源选取、算法设计上还存在一定缺陷,致使检测时延长、准确性差。
6、由上述内容可知,前两类方法在稳定性、实际可行性以及成本开销上都难以满足对火灾检测时延以及稳定性有较高要求的复杂场景,相比较下多传感器数据融合类的方法是比较合适的选择,其中如何处理多传感器信息是最关键的问题,但目前已有的算法在多传感器信息冲突等一些特殊的条件下得到的数据融合结果,难以满足火灾检测的可行性、准确性、时效性等要求。
技术实现思路
1、为了克服上述现有技术的缺点,本发明的目的在于提供一种基于bp神经网络和d-s证据理论的地下道路火灾检测方法,以期在存在较多误导信息的检测事件下,仍然能给出可靠性较高的检测结果,并显著降低火灾检测的时延。
2、为了实现上述目的,本发明采用的技术方案是:
3、一种基于bp神经网络和d-s证据理论的地下道路火灾检测方法,包括如下步骤:
4、步骤1,为检测地下道路火灾的m种事件,存在n个类型传感器的信息需要采集,将这m种事件定义为焦元集合f={f1、f2、……、fm},m≥2,fm表示第m个焦元,也即第m种事件;将n个类型传感器定义为证据源e={e1、e2、……、em},n≥1,en表示第n个证据,也即第n个类型传感器采集的数据;对该n个类型传感器采集的数据进行预处理后,按照数据来源进行归类;
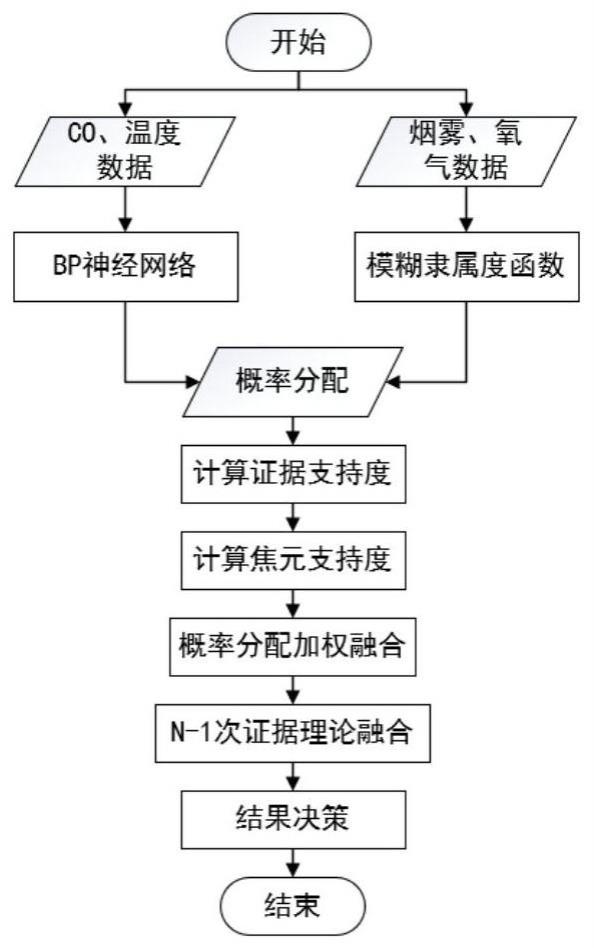
5、步骤2,根据不同类型传感器数据,基于bp神经网络或模糊隶属度函数进行基本概率分配,得到各类型传感器对火灾事件的判断结果,即单一传感器决策结果;
6、步骤3,通过计算证据支持度与焦元支持度,对所有的判断结果重新进行权重修正;所述证据支持度,是指其他证据对某个证据针对火灾事件判断的认可程度,越多证据的判断结果与所述某个证据的判断结果接近,则证据支持度越大;所述焦元支持度,是指当所有证据认定某种火灾事件发生的概率要高于其他火灾事件发生概率超过一定阈值时,对高概率发生事件支持度越高的证据可信度越高,则焦元支持度越大;
7、步骤4,对经过权重修正的判断结果,通过基于d-s证据理论的融合算法进行融合,得到最终的火灾发生概率。
8、与现有技术相比,本发明的有益效果是:
9、本发明的实现方案对硬件设备的要求较低,对比于现有的数据融合方案,本发明所阐述的方法在检测的时延以及准确性上都有明显的提升。
10、本发明的方法针对以下几种常见误差事件所采取的策略以及相应的效果:
11、1、若根据不同类型传感器数据得到的结果分别趋向于两种极端(例如一半的传感器反应出没有发生火灾,一半的传感器反应出有火灾发生),将会根据传感器所监测的物理量的可靠性来对结果作进行加权(例如火灾中氧气和烟雾变化的稳定性要高于一氧化碳和温度,因此监测氧气和烟雾的传感器得出的结果要更可靠),从而避免因为监测结果两极分化而导致无法得出结论的事件,同时使结果更接近真实事件。
12、2、若根据一小部分类型传感器得到的结果不同于根据其他传感器得到的结果,算法将会秉持“少数服从多数的原则”,将得到另类结果中可能性最低的结果降低权重,这样最终数据融合出的决策结果才能有明显的倾向性。(一般的方法在存在持有不同“意见”的传感器结果时,其融合结果往往会被干扰,得到的融合结果没有明确的指向性,得到的信息就是无用的,不利于事件的判断)。
技术特征:
1.一种基于bp神经网络和d-s证据理论的地下道路火灾检测方法,其特征在于,包括:
2.根据权利要求1所述基于bp神经网络和d-s证据理论的地下道路火灾检测方法,其特征在于,所述步骤1,预处理的方法如下:
3.根据权利要求1所述基于bp神经网络和d-s证据理论的地下道路火灾检测方法,其特征在于,所述步骤2,如果数据源易受非检测事件意外因素影响或在检测事件中自身不稳定,则基于bp神经网络进行基本概率分配;否则基于模糊隶属度函数进行基本概率分配。
4.根据权利要求1所述基于bp神经网络和d-s证据理论的地下道路火灾检测方法,其特征在于,所述传感器包括:co浓度传感器、温度传感器、烟雾传感器、氧气浓度传感器;所述co浓度传感器和温度传感器的数据基于bp神经网络进行基本概率分配;所述烟雾传感器和氧气浓度传感器的数据基于模糊隶属度函数进行基本概率分配;bp神经网络的输入为观测值与正常值的差值、平均值、变化速率;输出为无火、阴燃火、明火的判断概率。
5.根据权利要求1所述基于bp神经网络和d-s证据理论的地下道路火灾检测方法,其特征在于,所述步骤3,先将单一传感器决策结果按照权重修正算法先构建关联矩阵,即im矩阵;然后分别计算证据支持度与焦元支持度,从而得到权重系数;最终得到证据源与焦元概率关系的对应矩阵其中,pnm是指通过第n个证据判断第m种事件可能发生的概率。
6.根据权利要求5所述基于bp神经网络和d-s证据理论的地下道路火灾检测方法,其特征在于,构建的关联矩阵描述了证据与证据之间的关系,表示如下:
7.根据权利要求1所述基于bp神经网络和d-s证据理论的地下道路火灾检测方法,其特征在于,所述步骤4,n个证据的融合公式为:
8.根据权利要求1所述基于bp神经网络和d-s证据理论的地下道路火灾检测方法,其特征在于,所述步骤4,根据最终的融合结果,每个焦元都会有一个发生的概率值,采用阈值法设置一个最大值,判断某一事件是否可能发生,所述某一事件是指无火、阴燃火、明火三种事件中的一种。
技术总结
一种基于BP神经网络和D‑S证据理论的地下道路火灾检测方法,为检测地下道路火灾的M种事件,存在N个类型传感器的信息需要采集,将这M种事件定义为焦元集合;将N个类型传感器定义为证据源;对该N个类型传感器采集的数据进行预处理后,按照数据来源进行归类;根据不同类型传感器数据,基于BP神经网络或模糊隶属度函数进行基本概率分配,得到各类型传感器对火灾事件的判断结果,即单一传感器决策结果;通过计算证据支持度与焦元支持度,对所有的判断结果重新进行权重修正;对经过权重修正的判断结果,通过基于D‑S证据理论的融合算法进行融合,得到最终的火灾发生概率。本发明方法在检测的时延以及准确性上都有明显的提升。
技术研发人员:张天雨,刘毅,邱云周,贾根团
受保护的技术使用者:西安电子科技大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!