一种仿真场景集生成方法、装置、设备及介质与流程
本发明涉及数据处理,尤其涉及一种仿真场景集生成方法、装置、设备及介质。
背景技术:
1、自动驾驶是依靠计算机与人工智能技术在没有人为操纵的情况下,完成完整、安全、有效的驾驶操作。在实际应用中,是由自动驾驶算法实现自动驾驶的。自动驾驶算法在应用于自动驾驶车辆之前,需要基于驾驶场景数据进行训练,直到自动驾驶算法满足需求。因此,训练自动驾驶算法需要驾驶场景数据。
2、目前,可以通过车辆上的传感器等设备采集大量的路测数据,可以将采集的路测数据做为驾驶场景数据。另外,可以通过人工的方式将驾驶场景数据中的重要场景的数据标注出来,进而基于标注的重要驾驶场景数据进行仿真训练。
3、但是,上述方式获取的驾驶场景数据中包含大量的冗余数据,并且这些驾驶场景数据中的很多数据的场景较为简单,并不能对自动驾驶算法的训练起到作用,基于这些驾驶场景数据进行仿真测试会导致大量资源的浪费。另外,可以通过人工的方式筛选驾驶场景数据不仅效率低,而且存在主观性,导致仿真系统的准确性低。
技术实现思路
1、本发明提供了一种仿真场景集生成方法、装置、设备及介质,实现了对路测数据集的地理分布进行高效且稳定的均匀化处理,提高了仿真系统的驾驶场景数据覆盖效率,提升了仿真场景集与自动驾驶算法训练需求的适配度,提高了生成仿真场景集的效率。
2、第一方面,本发明提供了一种仿真场景集生成方法,该方法包括:
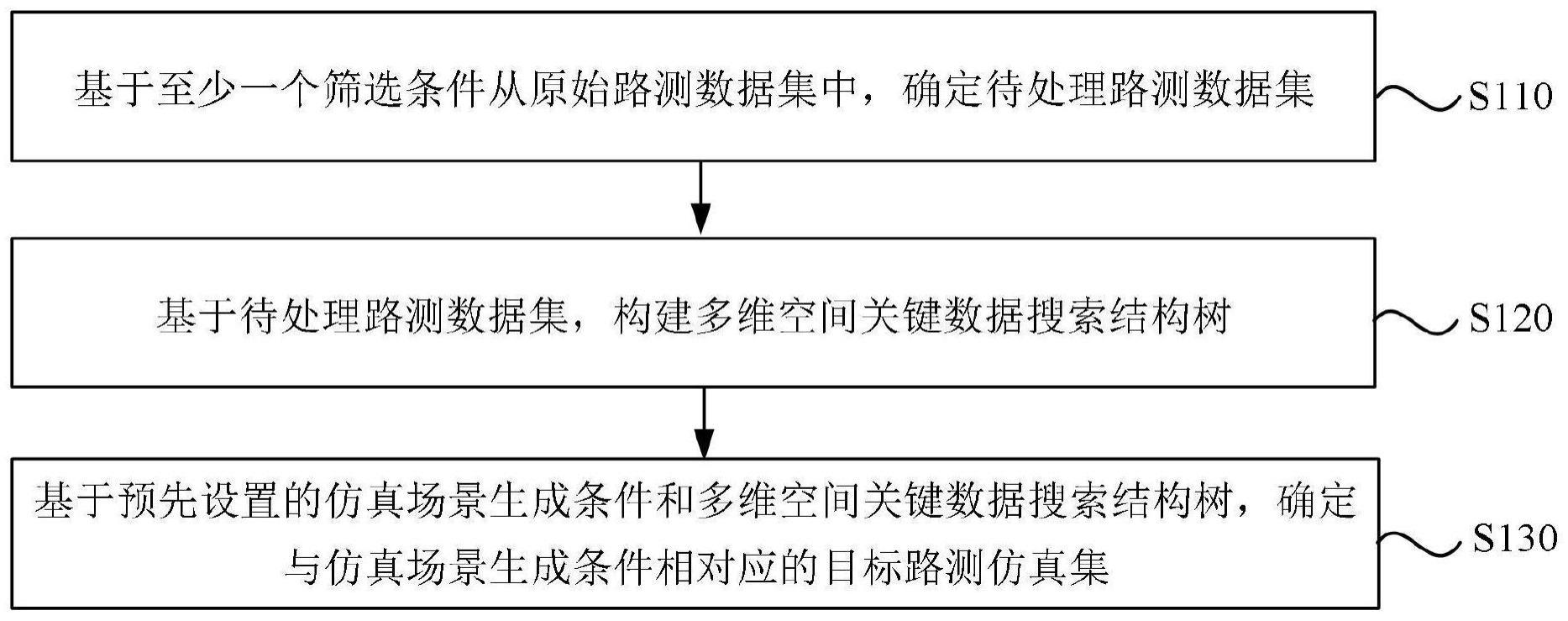
3、基于至少一个筛选条件从原始路测数据集中,确定待处理路测数据集;其中,所述待处理路测数据集中包括至少一组待处理数据;
4、基于所述待处理路测数据集,构建多维空间关键数据搜索结构树;
5、基于预先设置的仿真场景生成条件和所述多维空间关键数据搜索结构树,确定与所述仿真场景生成条件相对应的目标路测仿真集。
6、第二方面,本发明提供了一种仿真场景集生成装置,该装置包括:
7、数据集确定模块,用于基于至少一个筛选条件从原始路测数据集中,确定待处理路测数据集;其中,所述待处理路测数据集中包括至少一组待处理数据;
8、搜索树构建模块,用于基于所述待处理路测数据集,构建多维空间关键数据搜索结构树;
9、仿真集确定模块,用于基于预先设置的仿真场景生成条件和所述多维空间关键数据搜索结构树,确定与所述仿真场景生成条件相对应的目标路测仿真集。
10、第三方面,本发明提供了一种数据处理电子设备,包括:
11、至少一个处理器;以及
12、与至少一个处理器通信连接的存储器;其中,
13、存储器存储有可被至少一个处理器执行的计算机程序,计算机程序被至少一个处理器执行,以使至少一个处理器能够执行本发明任一实施例的仿真场景集生成方法。
14、第四方面,本发明提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机指令,计算机指令用于使处理器执行时实现本发明任一实施例的仿真场景集生成方法。
15、第五方面,本发明提供了一种计算机程序产品,计算机程序产品包括计算机程序,计算机程序在被处理器执行时实现本发明任一实施例的仿真场景集生成方法。
16、本发明实施例提供的技术方案,通过基于至少一个筛选条件从原始路测数据集中,确定待处理路测数据集,其中,待处理路测数据集中包括至少一组待处理数据,进而基于待处理路测数据集,构建多维空间关键数据搜索结构树,随后基于预先设置的仿真场景生成条件和多维空间关键数据搜索结构树,确定与仿真场景生成条件相对应的目标路测仿真集。本发明实施例提供的技术方案解决了在确定仿真场景集时,效率低,适配度低,无法有效筛选出符合自动驾驶算法训练需求的仿真场景集的技术问题,实现了对路测数据集的地理分布进行高效且稳定的均匀化处理,提高了仿真系统的驾驶场景数据覆盖效率,提升了仿真场景集与自动驾驶算法训练需求的适配度,提高了生成仿真场景集的效率。
17、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种仿真场景集生成方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,还包括:
3.根据权利要求1所述的方法,其特征在于,所述至少一个筛选条件包括驾驶状态因素、起始点和/或终止点因素、障碍物数量因素、车辆行驶轨迹因素、车辆行驶速度因素中的至少一种筛选因素。
4.根据权利要求1所述的方法,其特征在于,所述基于至少一个筛选条件从原始路测数据集中,确定待处理路测数据集,包括:
5.根据权利要求1所述的方法,其特征在于,所述基于所述待处理路测数据集,构建多维空间关键数据搜索结构树,包括:
6.根据权利要求5所述的方法,其特征在于,所述基于所述多个平面内的坐标数据,确定所述多维空间关键数据搜索结构树,包括:
7.根据权利要求1所述的方法,其特征在于,所述仿真场景生成条件包括场景数量,所述基于预先设置的仿真场景生成条件和所述多维空间关键数据搜索结构树,确定与所述仿真场景生成条件相对应的目标路测仿真集,包括:
8.一种仿真场景集生成装置,其特征在于,包括:
9.一种电子设备,其特征在于,电子设备包括:
10.一种包含计算机可执行指令的存储介质,计算机可执行指令在由计算机处理器执行时用于执行如权利要求1-7任一项的仿真场景集生成方法。
技术总结
本发明公开了一种仿真场景集生成方法、装置、设备及介质。该方法包括:基于至少一个筛选条件从原始路测数据集中,确定待处理路测数据集;其中,待处理路测数据集中包括至少一组待处理数据;基于待处理路测数据集,构建多维空间关键数据搜索结构树;基于预先设置的仿真场景生成条件和多维空间关键数据搜索结构树,确定与仿真场景生成条件相对应的目标路测仿真集,解决了在确定仿真场景集时,效率低,适配度低,无法有效筛选出符合自动驾驶算法训练需求的仿真场景集的技术问题,实现了对仿真场景集的地理分布进行高效且稳定的均匀化处理,提升了仿真场景集与自动驾驶算法训练需求的适配度,提高了生成仿真场景集的效率。
技术研发人员:金天
受保护的技术使用者:广州文远知行科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!