半导体WaferMap坐标转角GPU加速方法与流程
本发明属于半导体,具体涉及一种半导体wafermap坐标转角gpu加速方法。
背景技术:
1、在半导体wafer站点检测时,会碰到一些带有固定转角的测试数据。一个wafer上通常有几百到几万个检测点。如果利用cpu进行坐转换,它的运算序列化,对于wafer map这种矩阵数据的计算性能上非常不友好。
2、业内常用的方式是基于cpu的计算能力,对wafer map的转角坐进行转换;wafermap左边信息是个二维矩阵,cpu线性计算特性必然导致计算性能低下。
技术实现思路
1、本发明提供了一种半导体wafermap坐标转角gpu加速方法,其目的在于,利用djl提供的gpu加速库api,可有效提升wafer map转角坐标的计算性能。
2、本申请是通过以下技术方案实现的:
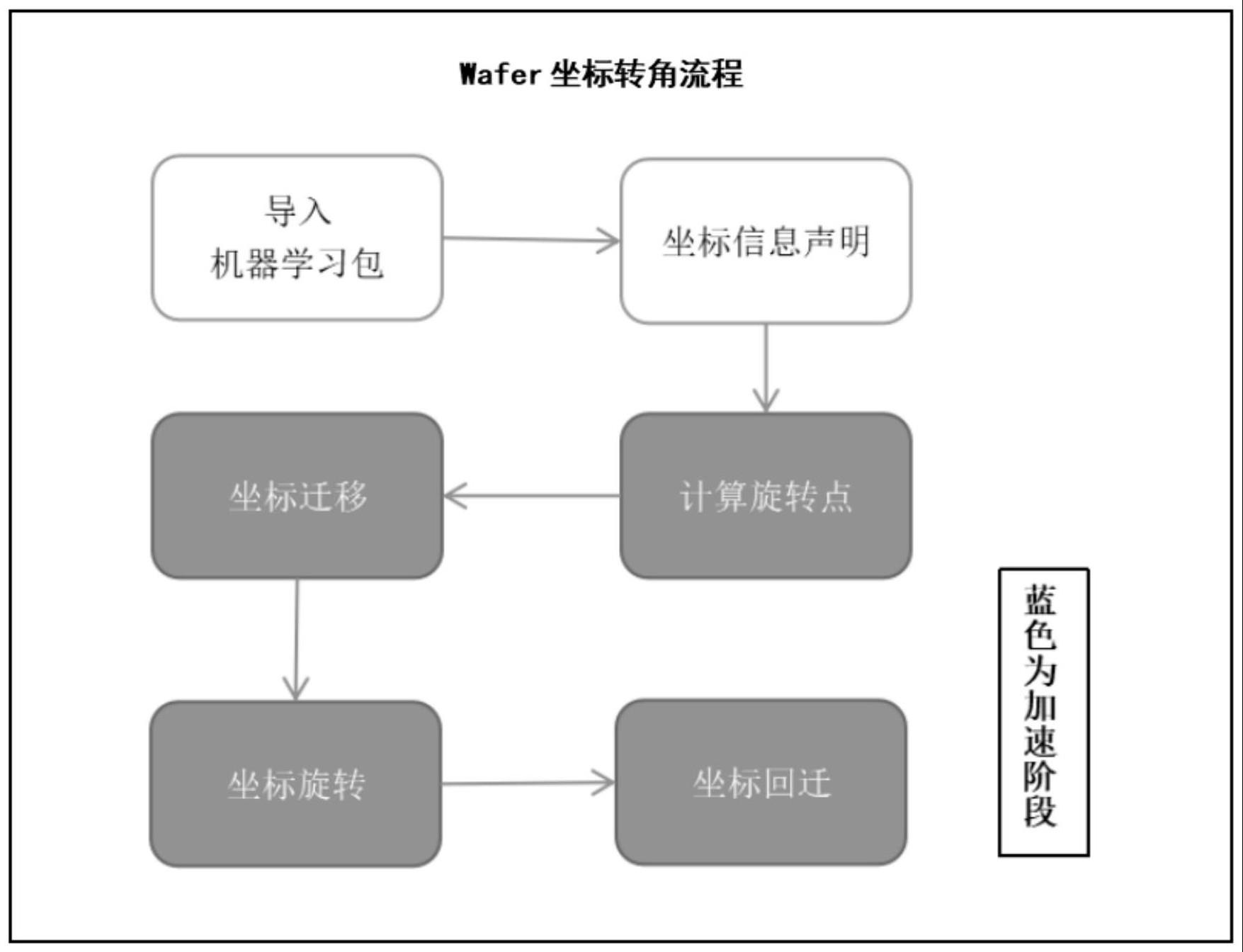
3、半导体wafermap坐标转角gpu加速方法,具体包括如下步骤:
4、(1)在java项目中导入djl机器学习依赖包;
5、(2)将原始wafermap的坐标信息,分别用ndarray来声明;
6、(3)根基wafermap的坐标信息,计算出旋转顶点;
7、(4)用ndarray提供算法结合旋转点坐标,实现坐标位置迁移;
8、(5)根据wafermap提供的角度信息,将步骤(4)中计算ndarray结果数据,按需求(90度,180度,270度角度)转换计算坐标;
9、(6)将步骤(5)中的ndarray处理结果,再从旋转点迁回初始坐标原点,即可完成转换。
10、作为优选实施例,所有ndarray数据都是基于基于矩阵,djl集支持基于gpu的并行加速计算。
11、作为优选实施例,所述步骤(5)中按需求转换计算坐标,包括90度、180度、270度角度。
12、有益效果:本发明半导体wafermap坐标转角gpu加速方法利用djl提供的gpu加速库api,可有效提升wafer map转角坐标的计算性能。
技术特征:
1.半导体wafermap坐标转角gpu加速方法,其特征在于,具体包括如下步骤:
2.根据权利要求1所述的半导体wafermap坐标转角gpu加速方法,其特征在于,所有ndarray数据都是基于基于矩阵,djl集支持基于gpu的并行加速计算。
3.根据权利要求1所述的半导体wafermap坐标转角gpu加速方法,其特征在于,所述步骤(5)中按需求转换计算坐标,包括90度、180度、270度角度。
技术总结
本发明公开了一种半导体WaferMap坐标转角GPU加速方法,具体包括如下步骤:(1)在java项目中导入DJL机器学习依赖包;(2)将原始wafermap的坐标信息,分别用NDArray来声明;(3)根基wafermap的坐标信息,计算出旋转顶点;(4)用NDArray提供算法结合旋转点坐标;(5)根据wafermap提供的角度信息,将步骤(4)中计算NDArray结果数据,按需求转换计算坐标;(6)将步骤(5)中的NDArray处理结果,再从旋转点迁回初始坐标原点,即可完成转换。本发明利用DJL提供的GPU加速库API,可有效提升Wafer Map转角坐标的计算性能。
技术研发人员:鹿才军,陈湘芳
受保护的技术使用者:上海哥瑞利软件股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!