损失函数计算方法和模型训练方法与流程
本申请的实施例涉及放疗剂量预测,尤其涉及一种损失函数计算方法和模型训练方法。
背景技术:
1、在制定放射治疗计划时要根据每个病人的靶区以及周围危及器官的情况综合考虑,尽可能保证照射部位的剂量并且保护周围正常组织和危及器官,在消灭肿瘤的同时尽量避免周围正常组织受到损伤。
2、传统的放射治疗计划高度依赖物理师的临床经验积累,且需要经过多轮优化才能满足临床需求,操作费时费力;基于深度学习的自动化放射治疗计划模型可以通过数据的监督学习完成剂量预测任务,但是模型会更倾向于优化较好学习的点位,对于困难点的优化能力会随着模型的迭代不断减少,导致模型的剂量预测结果准确度较低。
技术实现思路
1、为了解决上述至少一项技术问题,本申请的实施例提供了一种损失函数计算方法和模型训练方法。
2、第一方面,本申请的实施例提供了一种损失函数计算方法,所述方法基于3d unet网络模型计算损失函数,所述3d unet网络模型为单编码器双解码器结构;
3、所述方法包括:
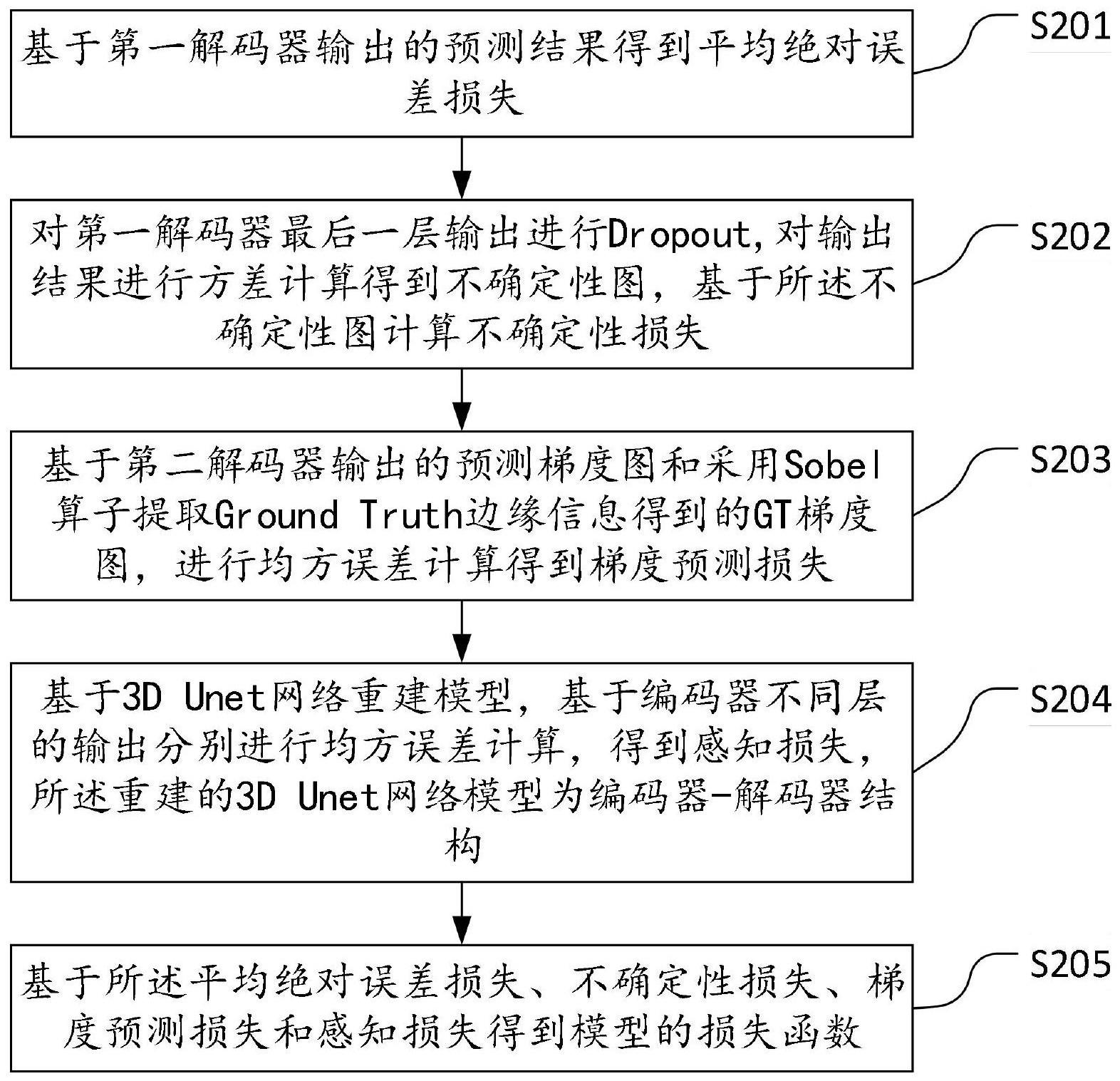
4、基于第一解码器输出的预测结果得到平均绝对误差损失;
5、对第一解码器最后一层输出进行dropout,对输出结果进行方差计算得到不确定性图,基于所述不确定性图计算不确定性损失;
6、基于第二解码器输出的预测梯度图和采用sobe l算子提取ground truth边缘信息得到的gt梯度图,进行均方误差计算,得到梯度预测损失;
7、基于3d unet网络重建模型,基于重建模型编码器不同层的输出分别进行均方误差计算,得到感知损失,所述重建的3d unet网络模型为编码器-解码器结构;
8、基于所述平均绝对误差损失、不确定性损失、梯度预测损失和感知损失得到模型的损失函数。
9、在一种可能的实现方式中,所述基于所述不确定性图计算不确定性损失包括:
10、对所述不确定性图进行归一化处理,得到不确定性分数;
11、基于所述不确定性分数和平均绝对误差损失,计算不确定性损失。
12、在一种可能的实现方式中,所述基于第二解码器输出的预测梯度图和采用sobe l算子提取ground truth边缘信息得到的gt梯度图之前,还包括:
13、基于多任务学习,设计辅助梯度的预测任务;
14、基于所述辅助梯度的预测任务获取梯度信息。
15、在一种可能的实现方式中,所述基于3d unet网络重建模型之前,还包括:
16、基于多任务学习,设计模型重建任务;
17、基于所述模型重建任务,重建3d unet网络模型。
18、在一种可能的实现方式中,所述模型重建任务使用影像和真实值作为输入重建所述3d unet网络模型。
19、在一种可能的实现方式中,所述基于重建模型编码器不同层的输出分别进行均方误差计算,得到感知损失之前,还包括:
20、将影像分别结合预测值和真实值输入重建的3d unet网络模型。
21、在一种可能的实现方式中,所述基于重建模型编码器不同层的输出分别进行均方误差计算,得到感知损失,包括:
22、基于编码器不同层的输出分别进行均方误差计算,得到每层的均方误差损失;
23、基于所述每层的均方误差损失得到模型的感知损失。
24、在一种可能的实现方式中,所述基于所述平均绝对误差损失、不确定性损失、梯度预测损失和感知损失得到模型的损失函数,包括:
25、基于实验对比,获取所述平均绝对误差损失、不确定性损失、梯度预测损失和感知损失的不同权重值;
26、基于所述平均绝对误差损失、不确定性损失、梯度预测损失和感知损失与对应权重值的乘积和得到模型的损失函数。
27、第二方面,本申请的实施例提供了一种模型训练方法,包括:
28、获取ct影像、危及器官的标注图以及靶区的标注图;
29、将所述ct影像、危及器官的标注图以及靶区的标注图作为3d unet网络模型的输入得到剂量预测结果;
30、根据权利要求1-8中任一项所述的方法计算模型的损失函数;
31、根据所述损失函数更新3d unet网络模型,得到更新后的剂量预测结果。
32、在一种可能的实现方式中,所述ct影像数据分为训练集和测试集,其中训练集使用交叉验证方法。
33、综上所述,本申请具有以下有益技术效果:
34、本发明基于3d unet网络模型进行剂量预测,通过第一解码器输出的不确定性图进行不确定性损失计算,通过第二解码器输出的预测梯度图与提取边缘信息得到的gt梯度图进行梯度预测损失计算,通过重建的3d unet网络模型的编码器不同层的均方误差损失进行感知损失计算,基于不确定性损失、梯度预测损失和感知损失对剂量预测的平均绝对误差损失进行辅助和引导,让模型可以更好的学习和感知困难点,从而实现更好的预测结果,提高模型的预测准确度。
35、应当理解,
技术实现要素:
部分中所描述的内容并非旨在限定本申请的实施例的关键或重要特征,亦非用于限制本申请的范围。本申请的其他特征将通过以下的描述变得容易理解。
技术特征:
1.一种损失函数计算方法,其特征在于,基于3dunet网络模型计算损失函数,所述3dunet网络模型为单编码器双解码器结构;
2.根据权利要求1所述的方法,其特征在于,所述基于所述不确定性图计算不确定性损失包括:
3.根据权利要求1所述的方法,其特征在于,所述基于第二解码器输出的预测梯度图和采用sobel算子提取groundtruth边缘信息得到的gt梯度图之前,还包括:
4.根据权利要求1所述的方法,其特征在于,所述基于3dunet网络重建模型之前,还包括:
5.根据权利要求4所述的方法,其特征在于,所述模型重建任务使用影像和真实值作为输入重建所述3dunet网络模型。
6.根据权利要求1所述的方法,其特征在于,所述基于重建模型编码器不同层的输出分别进行均方误差计算,得到感知损失之前,还包括:
7.根据权利要求1所述的方法,其特征在于,所述基于重建模型编码器不同层的输出分别进行均方误差计算,得到感知损失,包括:
8.根据权利要求1所述的方法,其特征在于,所述基于所述平均绝对误差损失、不确定性损失、梯度预测损失和感知损失得到模型的损失函数,包括:
9.一种模型训练方法,其特征在于,包括:
10.根据权利要求9所述的方法,其特征在于,所述ct影像数据分为训练集和测试集,其中训练集使用交叉验证方法。
技术总结
本申请的实施例提供了一种损失函数计算方法和模型训练方法,损失函数计算方法基于3DUnet网络模型计算,3DUnet网络模型为单编码器双解码器结构;方法包括:基于第一解码器输出的预测结果得到平均绝对误差损失;对第一解码器最后一层输出进行Dropout,对输出结果进行方差计算得到不确定性图,基于不确定性图计算不确定性损失;基于第二解码器输出的预测梯度图和采用Sobel算子提取GroundTruth边缘信息得到的GT梯度图,进行均方误差计算,得到梯度预测损失;基于3DUnet网络重建模型,基于编码器不同层的输出分别进行均方误差计算,得到感知损失;基于四种损失得到模型的损失函数。本申请能够实现更好的预测结果,提高模型的预测准确度。
技术研发人员:陈颀,李帆,张倚萌,白璐,王少彬,陈宇
受保护的技术使用者:北京医智影科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!