一种图像分割方法、系统、电子设备及存储介质与流程
本发明涉及图像分割领域,更具体地,涉及一种图像分割方法、系统、电子设备及存储介质。
背景技术:
1、图像分割是自动驾驶感知中最重要的技术之一,利用图像语义分割的结果可以得到车辆的可行驶区域信息、前方障碍物信息等。采用传统方法或深度学习方法进行图像语义分割会因为数据量不丰富,模型学习能力有限等造成分割结果不精确。因此,如何提高图像分割的准确率是自动驾驶中的难点之一。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供一种图像分割方法、系统、电子设备及存储介质。
2、根据本发明的第一方面,提供了一种图像分割方法,包括:
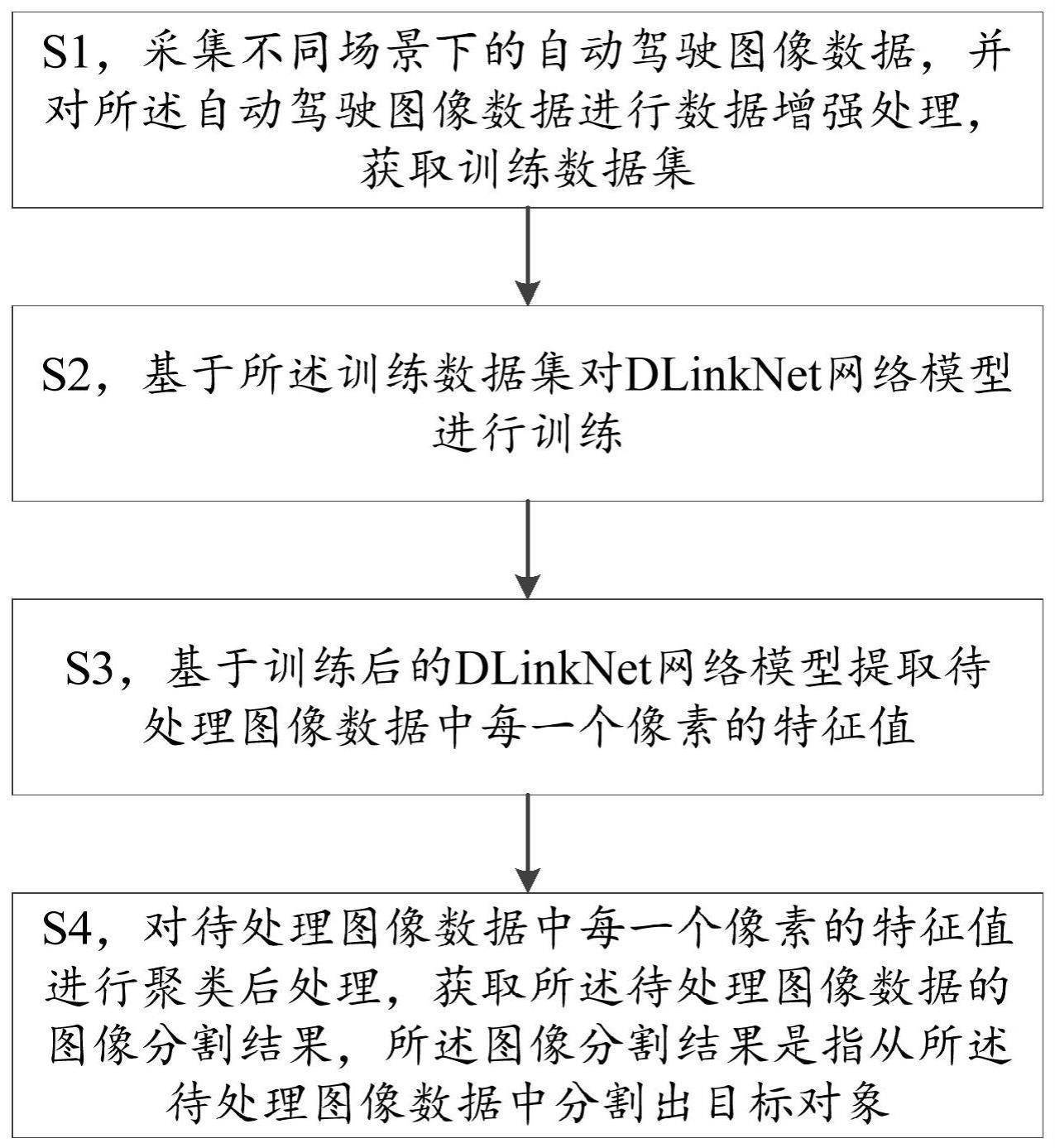
3、采集不同场景下的自动驾驶图像数据,并对所述自动驾驶图像数据进行数据增强处理,获取训练数据集;
4、基于所述训练数据集对dlinknet网络模型进行训练;
5、基于训练后的dlinknet网络模型提取待处理图像数据中每一个像素的特征值;
6、对待处理图像数据中每一个像素的特征值进行聚类后处理,获取所述待处理图像数据的图像分割结果,所述图像分割结果是指从所述待处理图像数据中分割出目标对象。
7、根据本发明的第二方面,提供一种图像分割系统,包括:
8、获取模块,用于采集不同场景下的自动驾驶图像数据,并对所述自动驾驶图像数据进行数据增强处理,获取训练数据集;
9、训练模块,用于基于所述训练数据集对dlinknet网络模型进行训练;
10、提取模块,用于基于训练后的dlinknet网络模型提取待处理图像数据中每一个像素的特征值;
11、聚类模块,用于对待处理图像数据中每一个像素的特征值进行聚类后处理,获取所述待处理图像数据的图像分割结果,所述图像分割结果是指从所述待处理图像数据中分割出目标对象。
12、根据本发明的第三方面,提供了一种电子设备,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机管理类程序时实现图像分割方法的步骤。
13、根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现图像分割方法的步骤。
14、本发明提供的一种图像分割方法、系统、电子设备及存储介质,对通过模型提取的分割特征进行聚类后处理,得到更为精确的图像分割结果,解决现有方法中由于数据量不丰富,模型学习能力有限等造成分割结果不精确的问题。提高自动驾驶中图像分割的精度。
技术特征:
1.一种图像分割方法,其特征在于,包括:
2.根据权利要求1所述的图像分割方法,其特征在于,所述采集不同场景下的自动驾驶图像数据,并对所述自动驾驶图像数据进行数据增强处理,获取训练数据集,包括:
3.根据权利要求1或2所述的图像分割方法,其特征在于,基于所述训练数据集对dlinknet网络模型进行训练,包括:
4.根据权利要求1所述的图像分割方法,其特征在于,所述对待处理图像数据中每一个像素的特征进行聚类后处理,获取所述待处理图像数据的图像分割结果,包括:
5.根据权利要求4所述的图像分割方法,其特征在于,所述预设条件为目标函数值小于第一设定阈值或者当前目标函数值与上一次迭代的目标函数值的变化值小于第二设定阈值。
6.根据权利要求4所述的图像分割方法,其特征在于,所述d中,基于所述聚类中心集合z,对元素集合o进行聚类,基于聚类结果计算目标函数j,包括:
7.根据权利要求4所述的图像分割方法,其特征在于,所述d中基于所述聚类中心集合z,对元素集合o进行聚类,之后包括:
8.一种图像分割系统,其特征在于,包括:
9.一种电子设备,其特征在于,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机管理类程序时实现如权利要求1-7任一项所述的图像分割方法的步骤。
10.一种计算机可读存储介质,其特征在于,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现如权利要求1-7任一项所述的图像分割方法的步骤。
技术总结
本发明提供一种图像分割方法、系统、电子设备及存储介质,方法包括:采集不同场景下的自动驾驶图像数据,并对所述自动驾驶图像数据进行数据增强处理,获取训练数据集,对DLinkNet网络模型进行训练;基于训练后的DLinkNet网络模型提取待处理图像数据中每一个像素的特征值;对待处理图像数据中每一个像素的特征值进行聚类后处理,获取所述待处理图像数据的图像分割结果。本发明对通过模型提取的分割特征进行聚类后处理,得到更为精确的图像分割结果,解决现有方法中由于数据量不丰富,模型学习能力有限等造成分割结果不精确的问题。提高自动驾驶中图像分割的精度。
技术研发人员:何群,喻旸,李汉玢,尹玉成,刘奋
受保护的技术使用者:武汉中海庭数据技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!