用于钢卷塔型缺陷的检测方法、设备、系统及存储介质与流程
本发明属于自动化加工领域,尤其是涉及一种用于钢卷塔型缺陷的检测方法、设备、系统及存储介质。
背景技术:
1、传统钢厂在生产钢卷时,钢卷在成卷的过程中,由于制造问题可能导致冷轧带钢板(卷)的端部不齐,导致端面部分圈高于其他圈,呈现不同程度的宝塔形或面包形,这种情况的出现称之为钢卷塔型缺陷。
2、塔型的工艺缺陷会对后续的加工环节带来重要影响,极大降低钢卷产品的质量。目前传统的厂家均采用人工判别,由于钢卷的外形缺陷常常较为细微,在人工识别的情况下常常存在识别误差,无法及时对缺陷进行针对性的工艺操作。也有部分厂家所采用图像识别或者3d点云的方式判断钢卷塔型,但是前者所采用的图像识别,摄像头拍摄图像无法获取准确的3d信息,通过判断塔型凸出当前钢卷端面的高度判断是否需要对该钢卷进行返工处理,判断常常不精准;后者所提到的点云采集装置,则需要设计紧密的工装,如在下卷时通过安装支架固定钢卷并进行精准的定位,实现的成本高且受到区域限制。
3、由此,亟需一种新的钢卷塔型缺陷的检测方法。
技术实现思路
1、为解决现有技术中提出的技术问题,本发明提供了一种用于钢卷塔型缺陷的检测方法、设备、系统及存储介质。
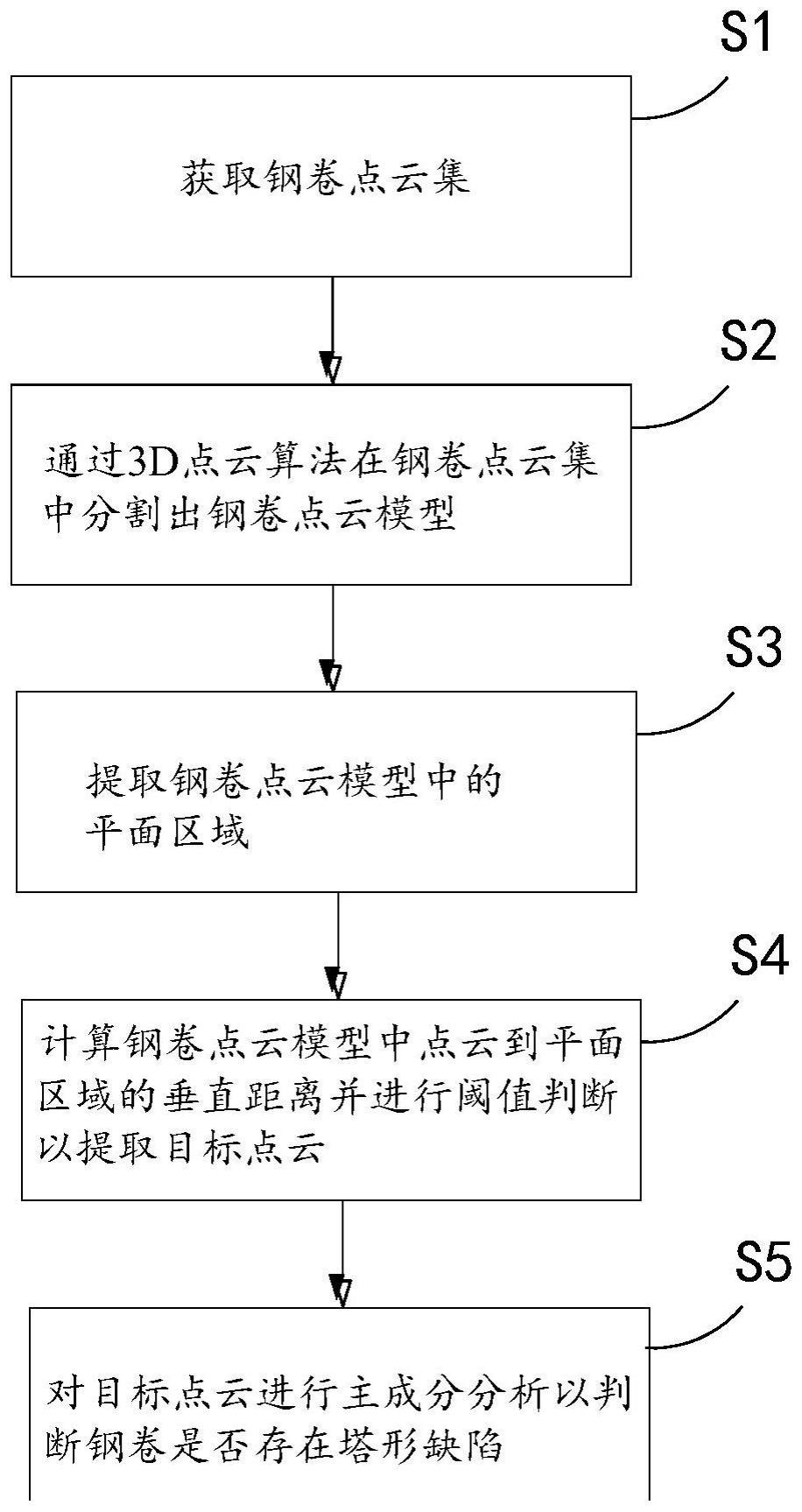
2、在本申请的第一方面提供一种用于钢卷塔型缺陷的检测方法,检测方法包括:获取钢卷点云集;通过3d点云算法在钢卷点云集中分割出钢卷点云模型;提取钢卷点云模型中的平面区域;计算钢卷点云模型中点云到平面区域的垂直距离并进行阈值判断以提取目标点云;对目标点云进行主成分分析以判断钢卷是否存在塔形缺陷。
3、在本申请进一步的方案中,通过3d点云算法将钢卷点云集分割出钢卷点云模型包括:通过3d点云算法将钢卷点云集分割出钢卷点云模型;对钢卷数据采用聚类分割算法得到钢卷点云模型。
4、在本申请进一步的方案中,计算钢卷点云模型中点云到平面区域的垂直距离并进行阈值判断以提取目标点云包括:根据钢卷的直径信息及中心点坐标分割钢卷的圆柱表面点云并删除圆柱表面点云以剩余待计算点云;通过距离算法获取待计算点云到平面区域的垂直距离;提取垂直距离大于预设的距离阈值的目标点云。
5、在本申请进一步的方案中,通过距离算法获取待计算点云到平面区域的垂直距离包括:将平面区域的沿圆周平均划分成预设的第一数量的扇形;计算每个扇形的区域内待计算点云到平面区域的垂直距离。
6、在本申请进一步的方案中,对目标点云进行主成分分析以判断钢卷是否存在塔形缺陷包括:对目标点云进行主成分分析,求取目标点云所围合的边长;当边长超过预设的边长阈值,确定钢卷存在塔型缺陷。
7、在本申请进一步的方案中,检测方法在获取钢卷点云集之前还包括:获取一帧钢卷的端面图像;计算端面图像的圆度;根据圆度调整点云采集装置的方向,循环获取端面图像并计算圆度,直至圆度满足预设的圆度阈值;计算钢卷的中心坐标;移动点云采集装置至中心坐标完成初始化。
8、在本申请第二方面还提供一种用于钢卷塔型缺陷的检测设备,检测设备包括:点云采集装置,用于采集钢卷点云集;上位机,和点云采集装置电性连接,上位机被配置成:控制点云采集装置获取钢卷点云集;通过3d点云算法在钢卷点云集中分割出钢卷点云模型;提取钢卷点云模型中的平面区域;计算钢卷点云模型中点云到平面区域的垂直距离并进行阈值判断以提取目标点云;对目标点云进行主成分分析以判断钢卷是否存在塔形缺陷。
9、在本申请进一步的方案中,检测设备还包括:pwm控制器,用于通过脉宽调制控制驱动装置;驱动装置,连接在点云采集装置一侧,用于驱动点云采集装置旋转/移动;图像采集装置,设置在点云采集装置一侧,用于获取图像;上位机在获取钢卷点云集之前还被配置成:控制图像采集装置获取一帧钢卷的端面图像;计算端面图像的圆度;控制驱动装置调整点云采集装置的方向,循环获取端面图像并计算圆度,直至圆度满足预设的圆度阈值;计算钢卷的中心坐标;移动点云采集装置至中心坐标完成初始化。
10、在本申请的第三方面还提供一种用于钢卷塔型缺陷的检测系统,包括:点云采集模块,用于接收获取钢卷点云集并通过3d点云算法在钢卷点云集中分割出钢卷点云模型;提取模块,用于提取钢卷点云模型中的平面区域;计算模块,用于计算钢卷点云模型中点云到平面区域的垂直距离并进行阈值判断以提取目标点云;判断模块,用于对目标点云进行主成分分析以判断钢卷是否存在塔形缺陷;初始化模块,用于接收钢卷的端面图像;计算端面图像的圆度;控制驱动装置调整点云采集装置的方向,循环获取端面图像并计算圆度,直至圆度满足预设的圆度阈值后停止控制点云采集装置移动;计算钢卷的中心坐标;移动点云采集装置至中心坐标完成初始化。
11、最终,本申请还提供一种计算机可读存储介质,计算机可读存储介质存储有一个或者多个程序,一个或多个程序可被一个或者多个处理器执行,以实现如上的检测方法。
12、有益效果:
13、本发明所提供一种钢卷塔型缺陷的检测方法,该钢卷塔型缺陷的检测方法通过建立钢卷点云模型,在钢卷点云模型中分割其平面区域,即对应钢卷的两个端面,通过计算点云到平面区域的垂直距离并阈值判断,从而提取出目标点云,随后通过对目标点云进行主成分分析以确定钢卷是否存在塔型缺陷,该方法相对于目前的图像识别多了一个维度,直接的3d坐标信息更为精准,受外界光照变化和成像距离影响较小,根据塔型缺陷的特点,对于该缺陷需要获取到精确的3d信息,通过判断溢出的距离的大小判断是否需要对该钢卷进行返工处理,可实现钢卷缺陷的全自动化识别,减少人力物力,提高产品的良率。
14、另外,本发明还通过将点云采集装置设置成具备转动自由度和移动自由度,融合2d图像识别,使得点云采集装置所建立的原点坐标系精准,从而提高通过3d点云判断钢卷塔型缺陷的可靠性。同时钢卷可不受到环境和场地的限制,无需设计精密的工装夹具,具备更高的通用性。
15、本发明实施例的其他特征和优点将在随后的具体实施方式部分予以说明。
技术特征:
1.一种用于钢卷塔型缺陷的检测方法,其特征在于,所述检测方法包括:
2.根据权利要求1所述的检测方法,其特征在于,所述通过3d点云算法将所述钢卷点云集分割出钢卷点云模型包括:
3.根据权利要求1所述的检测方法,其特征在于,所述计算钢卷点云模型中点云到平面区域的垂直距离并进行阈值判断以提取目标点云包括:
4.根据权利要求1所述的检测方法,其特征在于,所述通过距离算法获取所述待计算点云到平面区域的垂直距离包括:
5.根据权利要求1所述的检测方法,其特征在于,所述对目标点云进行主成分分析以判断钢卷是否存在塔形缺陷包括:
6.根据权利要求1~5任一项所述的检测方法,其特征在于,所述检测方法在获取所述钢卷点云集之前还包括:
7.一种用于钢卷塔型缺陷的检测设备,其特征在于,所述检测设备包括:
8.根据权利要求1~5任一项所述的检测设备,其特征在于,所述检测设备还包括:
9.一种用于钢卷塔型缺陷的检测系统,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有一个或者多个程序,一个或多个所述程序可被一个或者多个处理器执行,以实现如权利要求1~6任一项的检测方法。
技术总结
本发明实施例提供一种用于钢卷塔型缺陷的检测方法、设备、系统及存储介质。检测方法包括:获取钢卷点云集;通过3D点云算法在钢卷点云集中分割出钢卷点云模型;提取钢卷点云模型中的平面区域;计算钢卷点云模型中点云到平面区域的垂直距离并进行阈值判断以提取目标点云;对目标点云进行主成分分析以判断钢卷是否存在塔形缺陷。该方法相对于目前的图像识别多了一个维度,直接的3D坐标信息更为精准,受外界光照变化和成像距离影响较小,根据塔型缺陷的特点,对于该缺陷需要获取到精确的3D信息,通过判断溢出的距离的大小判断是否需要对该钢卷进行返工处理,可实现钢卷缺陷的全自动化识别,减少人力物力,提高产品的良率。
技术研发人员:孙银健,蒋开文,刘石岩,郭敬,汪冻,邓彪,向丽丽,田奕宏,陈仁
受保护的技术使用者:北京瓦特曼智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!