一种基于YOLOv5网络模型的路面塌陷识别检测方法与流程
本申请涉及计算机图像检测识别领域,提供了一种基于yolov5网络模型的路面塌陷识别检测方法。
背景技术:
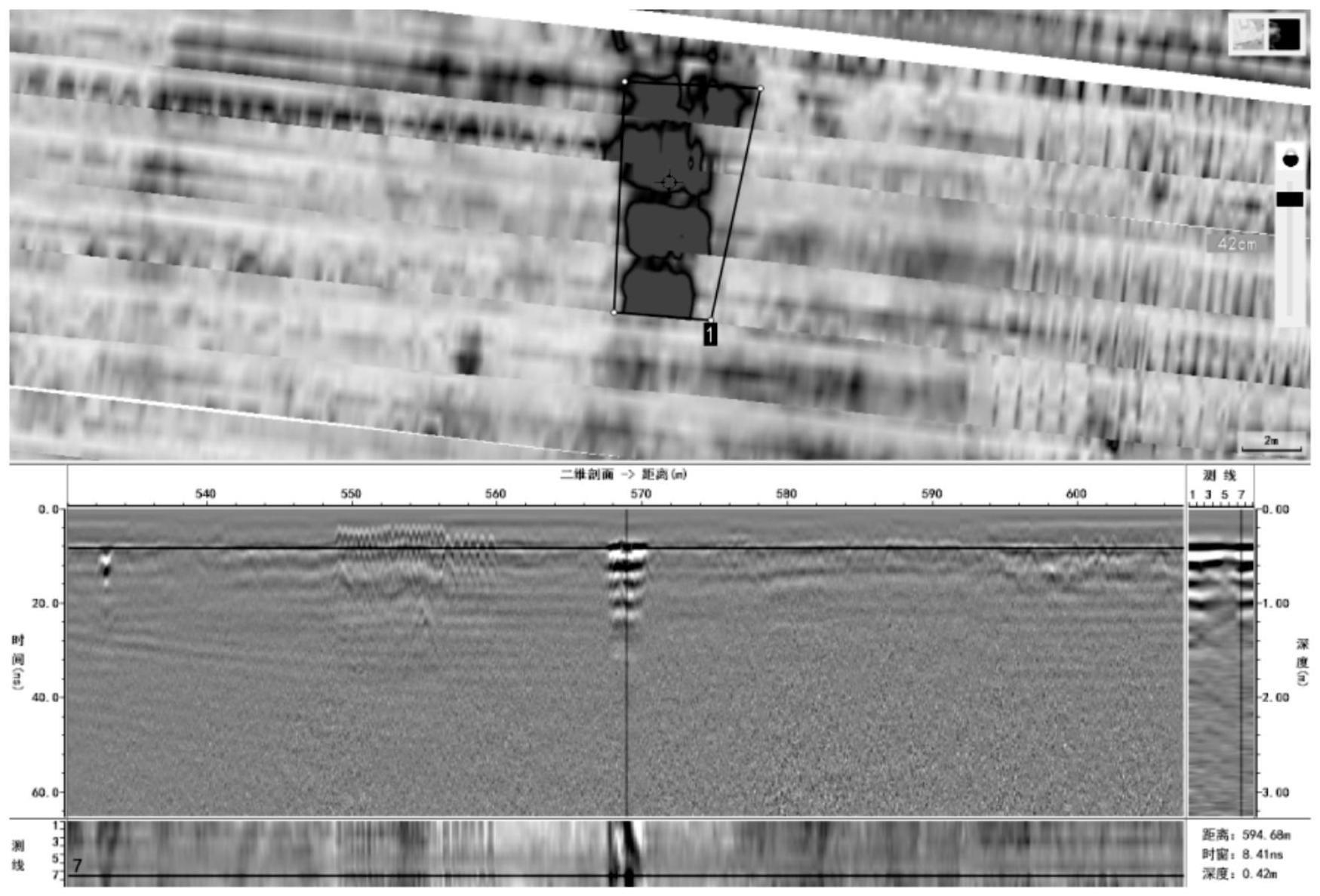
1、目前,对于路面塌陷灾害类型的识别主要有两个过程。第一个过程是对地质雷达图进行得到有可能出现风险的区域。通过地质雷达探测仪探测路面得到其路面下的地质雷达图,之后再由非常丰富经验的地质灾害识别人员,通过人力去圈出有可能出现风险的区域。第二个过程是分析切面图上有可能出现风险区域对应的剖面图。剖面图对应的是土地内部的一个个波形,通过灾害识别人员分析波形,判断当前位置是否是否出现了灾害,并且进一步判断出现的是哪一种灾害,最终得出结论。
2、对于上述提到目前路面塌陷灾害类型识别过程,具有非常明显的三个缺陷。一是需要识别灾害人员专业能力非常强。在对地址雷达图切面圈区域的时候,要求识别人员能够有丰富的经验,并且要能够主观结合客观因素对某个区域作出正确的判断。否则,如果少圈可能会漏掉非常严重的灾害区域;如果多圈则会浪费过多的时间成本去分析不必要的区域。二是时间成本过高。在识别地质灾害的过程中,首先要用地质雷达探测仪将公路地面探测一遍得到地质雷达图,再由识别人员一点一点的圈区域,再进行分析,而对于整个路面的探测,往往是几十上百公里,如果单单通过人一点点去判断,可想而知,整个过程花费的时间是非常多的。三是尽管专业人员能够去圈出对应的有可能是风险的区域,但是其正确率都是因人而异,没有办法保证较高的准确率。
3、实时识别地下塌陷能够以最快速度报告检测路段的问题,从而将隐患以第一时间上报,这是本项目要解决的问题。但是,在当前的场景中,地下出现塌陷的区域的位置不固定,长度可能远大于车体的长度或探测器支持的范围,这导致已有的图像区域拼接的方法需要处理很多的图像数据,因此图像区块拼接的方法可能不适用。
技术实现思路
1、本发明的目的在于提供解决当样本量过大时,如果模型处理不及时则无法达到实时识别的功能的问题。
2、为了实现上述目的本发明采用以下技术手段:
3、一种基于yolov5网络模型的路面塌陷识别检测方法,包括以下步骤:
4、步骤1、获取作为样本的地质雷达图,地质雷达图为包含时序特征的地下平面扫描图和包含时序特征的剖面实时波形图,水平和垂直方向均使用双信号源获取两幅图像;
5、步骤2、对平面扫描图灰度值进行圈区域操作得到可能存在风险的区域,记为区域a,将区域a在平面扫描图上分割开,得到去除不存在风险区域的只包含有区域a的区域筛选图a;
6、步骤3、对剖面实时波形图,使用缓冲扫描区-主扫描区-缓冲扫描区结构获得边界-塌陷区-边界信息构成的区域b,将区域b在平面扫描图上分割开,得到去除不存在风险区域的只包含有区域b的区域筛选图b;
7、步骤4、将区域筛选图a和区域筛选图b根据时序特征组成数据对;
8、步骤5、对每个数据对打上地质灾害类别标签后,划分测试集和训练集;
9、步骤6、通过训练集和测试集完成yolov5模型训练,得到训练好的yolov5模型;
10、步骤7、实时获取地质雷达图,通过步骤步骤2-步骤4处理后,送入训练好的yolov5模型进行地质灾害类别识别。
11、上述技术方案中,步骤2具体包括:
12、步骤2.1:平面扫描图简称为样本图片,通过平均分析样本图片得到一个灰度值n,第一次遍历样本图片,先从样本图片的第一个像素进行判断,由左到右大于n灰度值的设置为1,小于n灰度值的设置为0,经过第一次遍历,样本图片会被分只包含0或者1的区域,得到碎片化图;
13、步骤2.2:进行第二次遍历,依次遍历步骤1.1得到的碎片化图中的每个像素点,如果灰度值为0,则跳过,如果灰度值为1,则去遍历该像素点周围的8个最邻近像素点,将像素点为1的加入到一个集合中,最后遍历完之后,该区域就全部被加入到一个集合中,则就获得了该区域的在图片中的相对位置,接着继续遍历下个部分的像素点,直至遍历完整个图像,至此,会得到n个集合,而n个集合代表n个满足要求的区域,最后将区域在图片上分割开,得到去除空白区域的只包含有可能出现风险的区域筛选图a。
14、上述技术方案中,步骤3具体包括以下步骤:
15、对剖面实时波形图,使用一个宽度为mpx,m为自定义参数,长度为与剖面实时波形图高度相同的主扫描区段对剖面实时波形图沿时序增加方向进方向进行扫描,在主扫描区段的两侧各绑定一个宽度为npx的缓冲扫描区,n为自定义参数,用于探测是否存在边界,
16、对于主扫描区,剖面实时波形图中振幅判定值的绝对值大于阈值的结果为塌陷区;
17、对于缓冲扫描区,在宽度方向上计算剖面实时波形图的缓冲区范围内的傅里叶变换之后的结果,如果变化幅度大于阈值,则标记为边界;
18、通过缓冲扫描区、主扫描区、缓冲扫描区得到边界-塌陷区-边界组成的区域b,将区域b在平面扫描图上分割开,得到去除不存在风险区域的只包含有区域b的区域筛选图b。
19、因为本发明采用上述技术方案,因此具备以下有益效果:
20、本申请的优点在于能够花费较小的硬件开销通过步骤2-步骤4同时识别平面图和剖面图的特征部分,实时地找到这些可能有问题区域,然后通过模型进行分类识别,这样的做法大大的减少了模型样本的输入量,能够提升模型的识别效率,且本发明采用包含时序特征的地下平面扫描图和包含时序特征的剖面实时波形图相结合的方式,送入模型识别,能够相互验证,提高识别准确率。
21、在单一识别的情况下,平面图无法做到准确地识别出纵向数据,仅能识别到道路平面的分层影像;剖面图无法识别每一层的平面的区域,仅能识别垂直于平面的波形图。因此只有结合了这两类图,才能准确地找到可能存在问题的区域,定位其三维坐标。
技术特征:
1.一种基于yolov5网络模型的路面塌陷识别检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于yolov5网络模型的路面塌陷识别检测方法,其特征在于:步骤2具体包括:
3.根据权利要求1所述的一种基于yol0v5网络模型的路面塌陷识别检测方法,其特征在于:步骤3具体包括以下步骤:
技术总结
本申请涉及计算机图像检测识别领域,提供了一种基于YOLOv5网络模型的路面塌陷识别检测方法。目的在于提供解决当样本量过大时,如果模型处理不及时则无法达到实时识别的功能的问题。主要方案包括获取包含时序特征的地下平面扫描图和包含时序特征的剖面实时波形图;对平面扫描图进行圈区得到区域筛选图A;对剖面实时波形图,使用缓冲扫描区‑主扫描区‑缓冲扫描区结构获得区域筛选图B;将区域筛选图A和区域筛选图B根据时序特征组成数据对;对每个数据对打上地质灾害类别标签后,划分测试集和训练集;通过训练集和测试集完成YOLOv5模型训练;实时获取地质雷达图,处理成数据对后,送入训练好的YOLOv5模型进行地质灾害类别识别。
技术研发人员:星文太,周程,李浩,刘雨江
受保护的技术使用者:青海省建筑建材科学研究院有限责任公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!