一种共轴直升机配平方法与流程
本发明属于直升机,具体涉及一种共轴直升机配平方法,可用于共轴直升机飞行载荷计算、降低共轴直升机振动、降低共轴直升机部件动应力的水平。
背景技术:
1、在直升机研发过程中,旋翼载荷的确定是非常重要的一环,直接关系到直升机所有结构部件的强度、疲劳和全机振动水平,也会影响到直升机的寿命、性能和飞行安全,因此直升机旋翼载荷的确定是直升机研发的关键技术之一。
2、目前国内传统的直升机构型为单旋翼带尾桨直升机,共轴直升机在国内从上世纪90年代才开始研究。相比单旋翼带尾桨直升机,共轴直升机有上下两套旋翼系统,上下旋翼反向旋转来实现扭矩平衡(不再需要尾桨),共轴直升机在飞行过程中,在半差动操纵(上下旋翼横向和纵向周期变距联动、总距有差动)的情况下上下旋翼会产生相互作用力。
3、直升机稳定飞行时,重心处三个方向的合力(3个)和合力矩(3个)趋于零,因此常规的配平方法是采用全机六力素平衡方程进行配平。配平量中有4个操纵量:驾驶员总距,驾驶员横向周期变距,驾驶员纵向周期变距,差动总距;2个姿态角:俯仰角和滚转角。平衡方程是非线性方程组,使用newton-raphson数值方法进行求解,通过反复迭代,得到满足收敛精度的解时停止迭代。共轴直升机有两个主旋翼:上旋翼和下旋翼,每个旋翼都有总距、纵向周期变距和横向周期变距三个操纵量,共有6个操纵量,操纵系统操纵量是冗余的。选择常规的六力素平衡方程求解,必须消除两个操纵量,而常规做法是令上下旋翼的纵向周期变距相同,横向周期变距相同。这种配平方法中,上下旋翼的俯仰力矩和滚转力矩没有得到严格的限制,存在着对配平无效的相互作用力和力矩。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种共轴直升机配平方法,用以解决常规直升机配平方法所存在的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种共轴直升机配平方法,具体步骤包括:
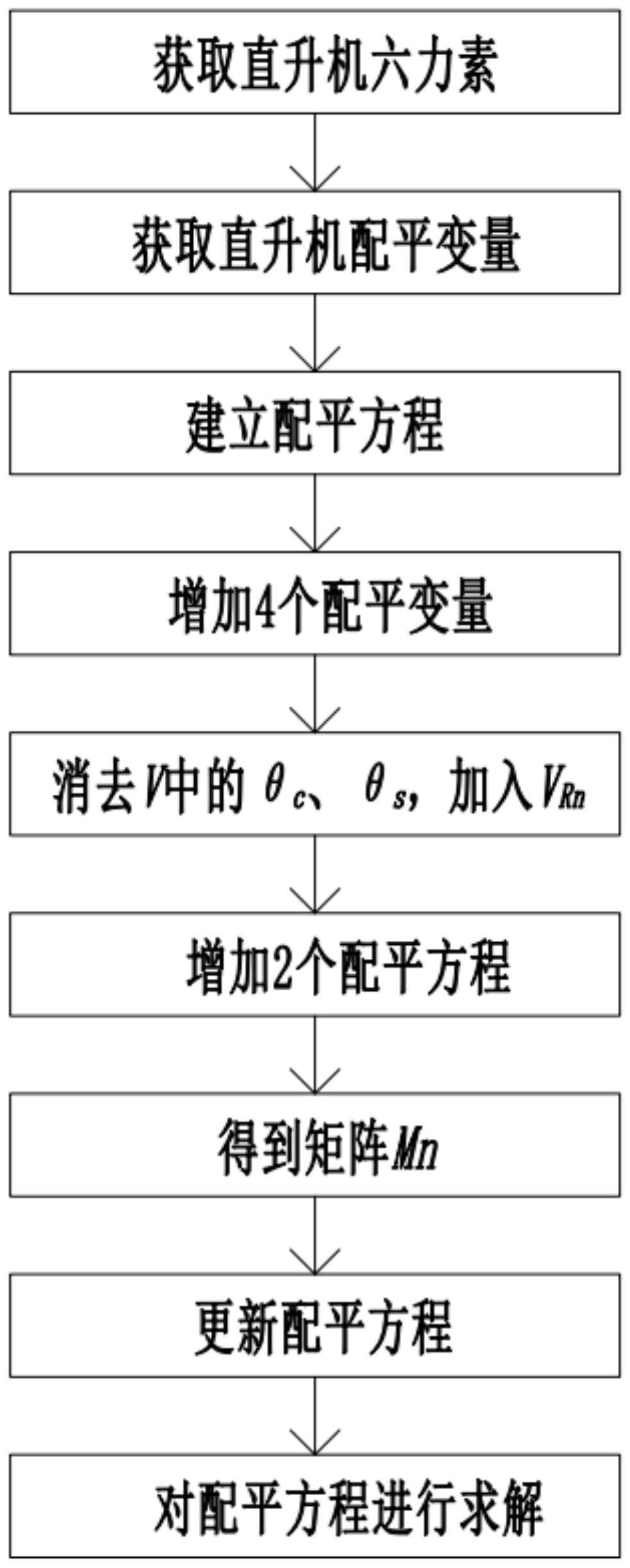
4、步骤1,获取直升机六力素m1:
5、综合上、下旋翼载荷、机身的气动载荷和重力,得到所有载荷在全机重心处三个方向的合力及合力矩,即直升机六力素m1,
6、m1=[fx,fy,fz,mx,my,mz];
7、步骤2,获取直升机配平变量v:
8、其中θo为驾驶员总距,θc为驾驶员横向周期变距,θs为驾驶员纵向周期变距,θp为差动总距,为俯仰角,γ为滚转角;
9、步骤3,建立配平方程:
10、直升机稳定飞行时,全机重心处的三个方向的合力和合力矩均趋于0,得出稳定飞行状态下直升机平衡方程:
11、∑fx=0,
12、∑fy=0,
13、∑fz=0,
14、∑mx=0,
15、∑my=0,
16、∑mz=0;
17、步骤4,对配平方程进行求解。
18、进一步的,还包括步骤3.1;
19、步骤3.1,增加4个配平变量:
20、解除上下旋翼纵向、横向周期变距联动,实现全差动操纵,使得控制上、下旋翼周期变距的4个变量,作为独立变量参与配平;
21、vrn=[θr1c,θr1s,θr2c,θr2s],其中θr1c为下旋翼横向周期变距;θrs为下旋翼纵向周期变距;θr2c为上旋翼横向周期变距;θr2s为上旋翼纵向周期变距。
22、进一步的,还包括步骤3.2;
23、步骤3.2,消去v中的θc、θs,加入vrn,得到8个配平变量:
24、
25、进一步的,还包括步骤3.3;
26、步骤3.3,增加2个配平方程;
27、与8个配平变量对应引入另外两个方程,∑δ(mxr1-mxr2)=0,∑δ(myr1-myr2)=0,最大限度地消除上、下旋翼力和力矩相互作用,引入上、下旋翼滚转力矩差值为零和上、下旋翼俯仰力矩差值为零。
28、进一步的,还包括步骤3.4;
29、步骤3.4,得到矩阵mn:
30、上下旋翼俯仰力矩和滚转力矩的均值量作为输入量,通过静态微分方程mn=dsx,得到矩阵mn。
31、其中,
32、mn=[δ(mxr1-mxr2),δ(myr1-myr2)],
33、
34、x=[mxr1,myr1,mxr2,myr2]。
35、进一步的,还包括步骤3.5;
36、步骤3.5,更新配平方程:
37、通过解除上、下旋翼纵向、横向周期变距联动,引入上、下旋翼滚转力矩差值为零和上、下旋翼俯仰力矩差值为零构成共轴直升机8变量配平方程:
38、∑fx=0,
39、∑fy=0,
40、∑fz=0,
41、∑mx=0,
42、∑my=0,
43、∑mz=0,
44、∑δ(mxr1-mxr2)=0,
45、∑δ(myr1-myr2)=0。
46、进一步的,步骤1中fx,fy,fz为直升机重心处在x,y,z三个方向的合力。
47、进一步的,步骤1中mx,my,mz为直升机重心处在x,y,z三个方向的合力矩。
48、进一步的,步骤4中的配平方程使用newton-raphson数值方法进行求解。
49、进一步的,步骤2和步骤3.2中θo,θc,θs,θp,θr1c,θr1s,θr2c,θr2s,均与旋翼载荷相关,其中θr1c,θr1s,为单独操纵下旋翼的周期操纵量,θr2c,θr2s为单独操纵上旋翼的周期操纵量,θ,γ与机身气动载荷有关。
50、上述技术方案的有益效果如下:
51、1.从上、下旋翼俯仰和滚转力矩、桨叶根部挥舞弯矩等方面对常规方法和本发明方法结果进行对比:本发明通过新的配平方法,使旋翼俯仰和滚转力矩以及桨叶挥舞弯矩大大降低,尤其是影响结构疲劳的动载,在大速度前飞的情况下,可降低约50%。
52、2.本发明方法上、下旋翼桨毂俯仰力矩和滚转力矩比较均匀,对结构受载更加有利,降低了直升机振动水平,为直升机减重及性能提升提供了很大空间。
53、依据本发明的思路,还可以使用上下旋翼桨毂中心除俯仰力矩和滚转力矩外的其他力素,以及以某种加权方式对上下旋翼力素进行组合来形成两个补充方程,这两个补充方程与原六力素平衡方程联立,构成由8个方程组成的配平方程组。
54、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
技术特征:
1.一种共轴直升机配平方法,具体步骤包括:
2.根据权利要求1所述的一种共轴直升机配平方法,其特征在于,还包括步骤3.1;
3.根据权利要求2所述的一种共轴直升机配平方法,其特征在于,还包括步骤3.2;
4.根据权利要求3所述的一种共轴直升机配平方法,其特征在于,还包括步骤3.3;
5.根据权利要求4所述的一种共轴直升机配平方法,其特征在于,还包括步骤3.4;
6.根据权利要求5所述的一种共轴直升机配平方法,其特征在于,还包括步骤3.5;
7.根据权利要求1所述的一种共轴直升机配平方法,其特征在于,步骤1中fx,fy,fz为直升机重心处在x,y,z三个方向的合力。
8.根据权利要求1所述的一种共轴直升机配平方法,其特征在于,步骤1中mx,my,mz为直升机重心处在x,y,z三个方向的合力矩。
9.根据权利要求1所述的一种共轴直升机配平方法,其特征在于,步骤4中的配平方程使用newton-raphson数值方法进行求解。
10.根据权利要求3所述的一种共轴直升机配平方法,其特征在于,步骤2和步骤3.2中θo,θc,θs,θp,θr1c,θr1s,θr2c,θr2s,均与旋翼载荷相关,其中θr1c,θr1s,为单独操纵下旋翼的周期操纵量,θr2c,θr2s为单独操纵上旋翼的周期操纵量,γ与机身气动载荷有关。
技术总结
本发明涉及一种共轴直升机配平方法,属于直升机技术领域,解决了传统方法旋翼载荷过大的问题;一种共轴直升机配平方法,综合上旋翼、下旋翼、机身的气动力和重力,得到所有载荷在全机重心处的三力和三矩,即飞行状态下直升机六力素平衡方程;然后增加上旋翼与下旋翼力矩差值,得到两个新的配平方程,与直升机六力素方程组合构成8力素平衡方程,配平方程中的6个操纵量和2个姿态角作为变量;对配平方程进行求解。本发明消除了共轴直升机上下旋翼的相互作用力,大幅降低了桨叶和桨毂结构疲劳载荷,在大速度前飞时,旋翼动载荷可降低50%;本发明方法分别使上下旋翼桨毂俯仰力矩和滚转力矩等值,对结构受载更加有利,降低直升机振动水平。
技术研发人员:刘淑彦,张亚军,田刚印
受保护的技术使用者:北京中航智科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!