基于仿鼹鼠和农艺的丘陵产田六杆深松机构的创成方法
本发明涉及到面向丘陵产田的六杆深松机构的轨迹生成综合领域,具体是提供一种基于仿鼹鼠和农艺的丘陵产田六杆深松机构的创成方法。
背景技术:
1、土壤深松技术作为保护性耕作的主要内容,是指耕深可达25cm以上,可打破犁底层的一种松土方式。我国山地丘陵产田具有地势复杂和分布较为分散的特点,大型牵引式的深松方式极其不便于施展,目前机械化耕作方式多以小型旋耕机翻耕为主,深松耕作耕深不足,不能打破犁底层。cn109601026a公开了一种土壤深松机构,包括机架固定板、深松钩、连接柱和第一弹性元件,机架固定板用于与深松机的机架连接;深松钩的上端与机架固定板铰接。该深松机构在遇到强阻力或者障碍时,能够有效避障,延长使用寿命;该机构的缺陷是对浅层土壤的扰动过大,容易造成水土流失等问题。因此,急需开发一种可实现低能耗、低耕阻,高扰土性能的丘陵产田用小型深松设备执行机构。
技术实现思路
1、本发明的目的是基于动物刨土仿生原理,将鼹鼠前足刨土轨迹映射为仿生深松轨迹,并结合深松农艺要求对该轨迹进行改进,以改进后的仿生深松轨迹作为目标轨迹,提供一种可复现目标轨迹的六杆深松机构的创成方法。
2、本发明提供的技术方案是:
3、一种基于仿鼹鼠和农艺的丘陵产田六杆深松机构的创成方法,依次包括以下步骤:
4、第1步:将鼹鼠前足刨土轨迹映射为仿生深松轨迹;
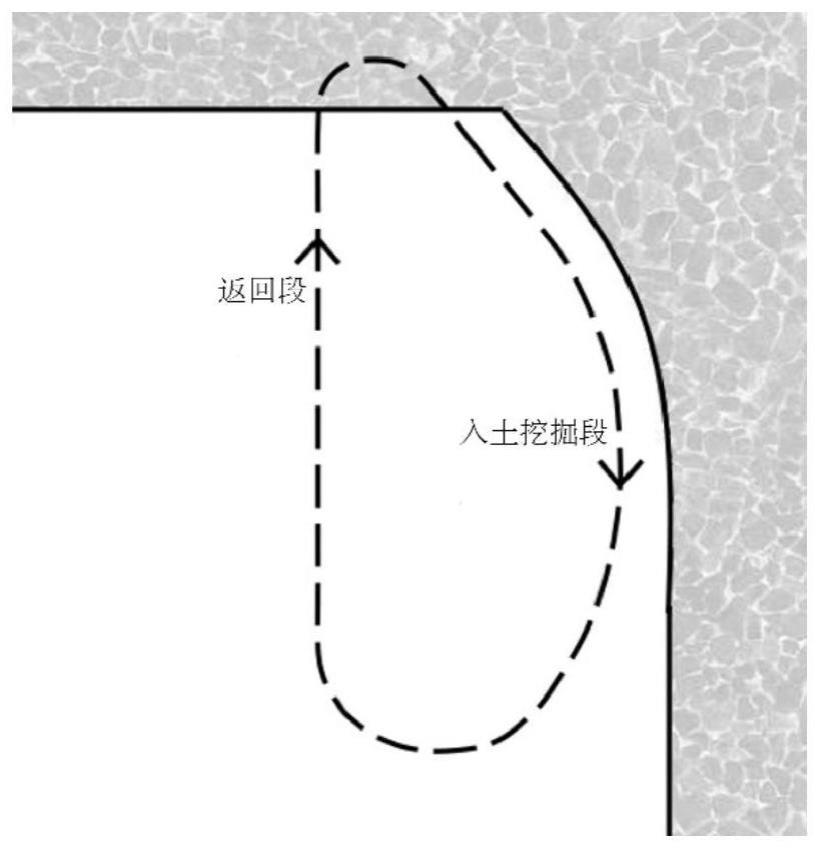
5、第2步:结合深松农艺要求,对仿生深松轨迹进行改进以尽可能小幅度地扰动浅层土壤,以改进后的仿生深松轨迹作为目标轨迹;
6、第3步:选取16个型值点对连续的目标轨迹离散化处理,作为目标轨迹点;
7、第4步:从已有的六杆机构型综合中筛选确定一种构型,以史蒂芬森ⅲ型六杆机构为例,写出轨迹发生点的位置函数;
8、第5步:建立史蒂芬森ⅲ型六杆机构轨迹生成综合任务的优化模型;
9、第6步:采用改进的差分算法求解所述第5步中建立的优化模型,得到机构参数的最优解。
10、第7步:依据所述第6步中求解出最优解,设计可复现目标轨迹的史蒂芬森ⅲ型六杆深松机构;
11、所述第1步中,由于鼹鼠前足刨土轨迹所在的平面段与地面垂直,而深松机构需要在与地面平行的平面上实现松土运动,因此将鼹鼠前足刨土轨迹翻转使其中的平面段露出地面并且与地面平行;为打破距地表25cm以下的犁底层,又按照深松耕深与鼹鼠前足实际刨土深度的比例类比放大,得到仿生深松轨迹。
12、所述第2步中,保护性耕作要求深松机具能够尽可能小幅度地扰动浅层土壤以保证表土层的平整度,从而改善地表径流和水土流失等问题;因此,结合深松农艺要求,对原仿生轨迹的出土段进行内凹式的改进,以使复现改进后仿生深松轨迹(即目标轨迹)的深松机构扰动完底层土壤后,立刻抽离浅层土壤,避免对浅层土壤造成大面积的扰动。
13、所述第3步中的离散化处理,是将16个型值点分散到目标轨迹上,两个相邻点的距离之比小于2。
14、所述第4步中,所述史蒂芬森ⅲ型六杆机构中,第二连杆ef上的p点位置预期实现目标轨迹,即轨迹发生点;轨迹发生点p的位置函数为:
15、
16、
17、其中:
18、α为第二连杆ef与水平方向的锐角夹角,ψ为第一连杆bc与水平方向的锐角夹角,p1和q1为确定e点在第一连杆的位置向量,p2和q2为确定p点在第二连杆的位置向量,a与b分别为曲柄的转动轴线和摆动点,a点同时也作为坐标原点,xb、yb为b点的坐标。
19、所述第5步中,所建立的史蒂芬森ⅲ型六杆机构轨迹生成综合任务的优化模型为:
20、
21、式中:代表目标轨迹点的坐标,代表有时序规律的发生轨迹点的坐标;x为由所有设计变量组成的向量;n=16,代表理想目标轨迹点的个数;h1(x)在解向量满足格拉索夫条件时取0,否则取1;h2(x)在θ2增幂或降幂排列时取0,反之取1;h3(x)在满足条件(3)时取0,反之取1;m为惩罚系数,取100。
22、本发明的有益效果是:根据本发明所述方法获得的六杆机构,使用时不但能够打破土壤深处的犁底层,还能够避免对浅层土壤造成的过大扰动以及水土流失,改善地表径流;并且六杆机构结构更稳定、承载能力更强,更适用于深松土壤的较高负载工况。
技术特征:
1.一种基于仿鼹鼠和农艺的丘陵产田六杆深松机构的创成方法,依次包括以下步骤:
2.根据权利要求1所述的基于仿鼹鼠和农艺的丘陵产田六杆深松机构的创成方法,其特征在于:所述第1步中,由于鼹鼠前足刨土轨迹所在的平面段与地面垂直,而深松机构需要在与地面平行的平面上实现松土运动,因此将鼹鼠前足刨土轨迹翻转使其中的平面段露出地面并且与地面平行;又按照深松耕深与鼹鼠前足实际刨土深度的比例类比放大,得到仿生深松轨迹。
3.根据权利要求2所述的基于仿鼹鼠和农艺的丘陵产田六杆深松机构的创成方法,其特征在于:所述第2步中,结合深松农艺要求,对原仿生轨迹的出土段进行内凹式的改进,以使复现改进后仿生深松轨迹的深松机构扰动完底层土壤后,立刻抽离浅层土壤,避免对浅层土壤造成大面积的扰动。
4.根据权利要求3所述的基于仿鼹鼠和农艺的丘陵产田六杆深松机构的创成方法,其特征在于:所述第3步中的离散化处理,是将16个型值点分散到目标轨迹上,两个相邻点的距离之比小于2。
5.根据权利要求4所述的基于仿鼹鼠和农艺的丘陵产田六杆深松机构的创成方法,其特征在于:所述第4步中,所述史蒂芬森ⅲ型六杆机构中,第二连杆ef上的p点位置预期实现目标轨迹,即轨迹发生点;轨迹发生点p的位置函数为:
6.根据权利要求5所述的基于仿鼹鼠和农艺的丘陵产田六杆深松机构的创成方法,其特征在于:所述第5步中,所建立的史蒂芬森ⅲ型六杆机构轨迹生成综合任务的优化模型为:
技术总结
本发明涉及到面向丘陵产田的六杆深松机构的轨迹生成综合领域。目的是基于动物刨土仿生原理,将鼹鼠前足刨土轨迹映射为仿生深松轨迹,并结合深松农艺要求对该轨迹进行改进,以改进后的仿生深松轨迹作为目标轨迹,提供一种可复现目标轨迹的六杆深松机构的创成方法。技术方案是:一种基于仿鼹鼠和农艺的丘陵产田六杆深松机构的创成方法;包括:1将鼹鼠前足刨土轨迹映射为仿生深松轨迹;2结合深松农艺要求,对仿生深松轨迹进行改进以尽可能小幅度地扰动浅层土壤,以改进后的仿生深松轨迹作为目标轨迹;3选取16个型值点对连续的目标轨迹离散化处理,作为目标轨迹点;4以史蒂芬森Ⅲ型六杆机构为例,写出轨迹发生点的位置函数。
技术研发人员:翟宜彬,张雷,陈建能,张志恩,黄首智
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!