一种指尖表面仿指纹结构的设计方法及应用其的手爪手指
本发明涉及机器人,特别涉及及一种指尖表面仿指纹结构的设计方法,还涉及一种指尖表面仿指纹结构的水果采摘机器人手爪手指。
背景技术:
1、随着时代变迁,农业劳动力遭遇严重流失,飞速发展的智能技术为农业现代化与智能化提供了可行的解决方案,农业机器人的研发也越来越热门。水果采摘机器人作为应用广泛的农业机器人之一,主要包括机器视觉、机械臂、执行器以及控制系统。其中,执行器手爪的发展趋势是拟人化、柔性化。然而,现有水果采摘机器人的采摘成功率依旧有待提升,一方面是园林环境复杂,存在树叶、树枝等对果实的遮挡,另一方面是执行器机械手爪不够灵活、温柔,难以避免在采摘过程中误伤果实。
2、现有相关设计中,普通结构存在执行器灵活度不足的问题,例如技术方案一(发明创造名称为一种球型水果采摘机器人末端执行器,申请号为202220482100.2)、技术方案二(发明创造名称为一种瓜果采摘机器人末端执行器,申请号为202010881159.4)、技术方案三(发明创造名称为球形水果采摘机器人末端执行器,申请号为201811270001.2),而执行器采用拟人化手爪设计,可改善灵活度问题,但是,手爪抓取能力仍有待提高,例如技术方案四(发明创造名称为一种电磁驱动的多指柔性机械手爪,申请号为202220413708.x)、技术方案四(发明创造名称为一种刚柔结合的仿人五指机械手爪,申请号为202010491965.0)。
3、鉴于此,如何进一步改善执行器手爪与果实间的接触,是新型采摘机器人需要解决的关键问题。
技术实现思路
1、本发明旨在至少在一定程度上解决现有技术中的上述技术问题之一。为此,本发明实施例提供一种指尖表面仿指纹结构的设计方法,还提供一种指尖表面仿指纹结构的水果采摘机器人手爪手指,利用指尖表面仿指纹结构改善机器人手爪与果实之间的接触,提高采摘成功率。
2、根据本发明第一方面的实施例,提供一种指尖表面仿指纹结构的设计方法,包括以下步骤:
3、s1,采集指纹图像,进行优化获取优化图像,识别并提取所述优化图像中的指纹轮廓;
4、s2,基于所述指纹轮廓,借助建模软件进行重建,获得二维草图的平面指纹结构;
5、s3,对二维草图的所述平面指纹结构进行拉伸,获得三维结构的指纹表面结构,应用于手指指尖部位。
6、根据本发明第一方面的实施例,在所述步骤s1中,对所述指纹图像进行优化,是基于数字图像处理技术,采用形态学优化技术改善图像,获取优化图像。
7、上述指尖表面仿指纹结构的设计方法,至少具有以下有益效果:通过采集指纹图像,并提取指纹轮廓,通过建模获取到指纹表面结构,整个设计技术路线清晰,基于真实指纹图像的结构重建,可以带来高还原度的指纹表面结构,为拟人化手爪的设计提供更细腻的技术参考。
8、根据本发明第一方面的实施例,在所述步骤s1中,所述形态学优化技术为二值化、去噪声、腐蚀、膨胀的一种或几种的优化技术。
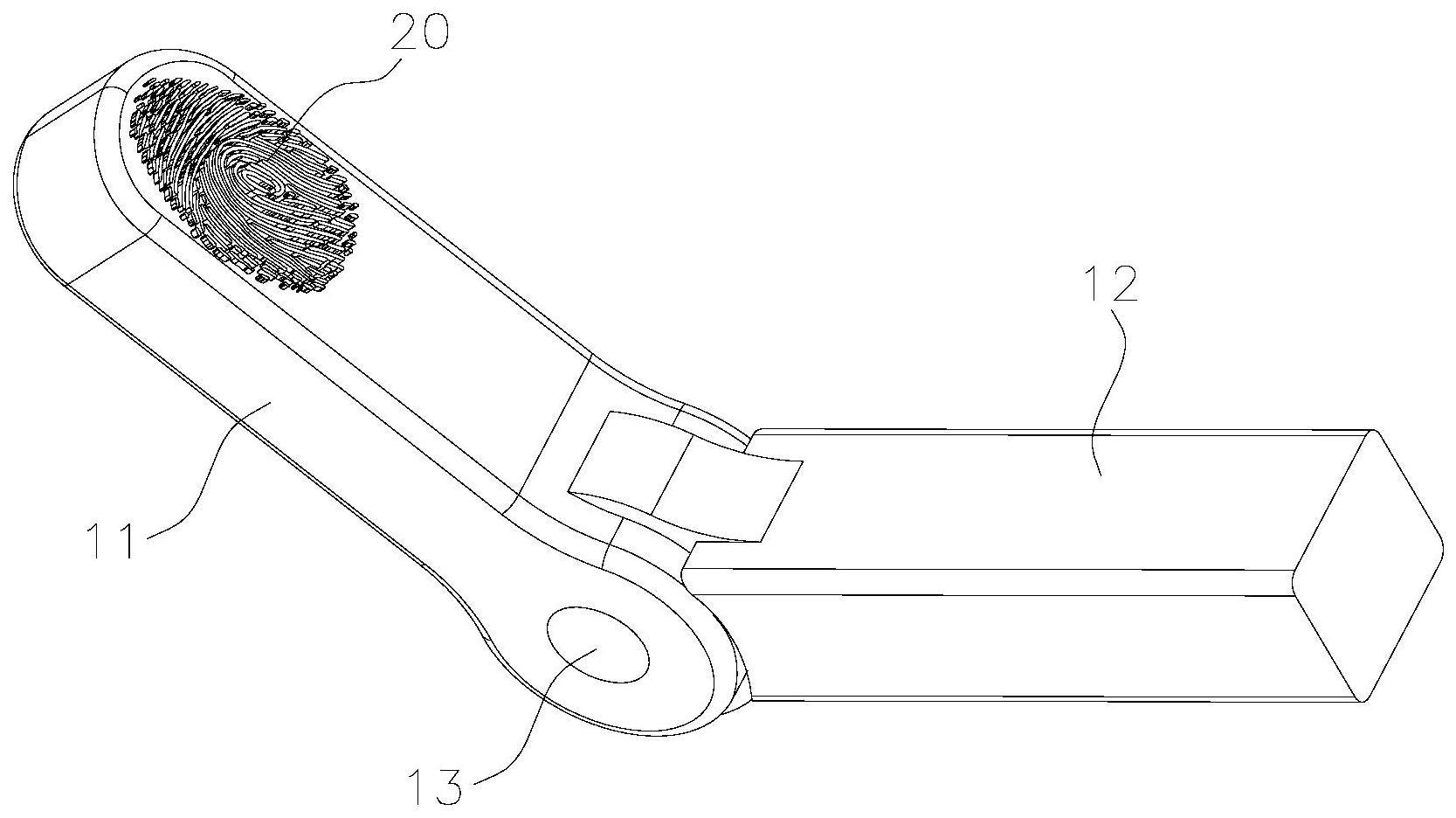
9、根据本发明第二方面的实施例,提供一种指尖表面仿指纹结构的水果采摘机器人手爪手指,包括第一指段和第二指段,所述第一指段和所述第二指段之间通过转动关节进行铰接,所述第一指段和所述第二指段两者的朝向面定义为采摘接触面;以及指尖表面仿指纹结构,应用本发明第一方面实施例所述的指尖表面仿指纹结构的设计方法进行设计,所述指尖表面仿指纹结构设置在所述第一指段的采摘接触面上,以为所述第一指段提供更高的接触摩擦力。进一步的,所述指尖表面仿指纹结构为柔性材料构件。
10、上述技指尖表面仿指纹结构的水果采摘机器人手爪手指,至少具有以下有益效果:上述技术方案,将指尖表面仿指纹结构应用到第二指段的采摘接触面上,基于真实指纹图像的结构重建,可以带来高还原度的指纹表面结构,可以带来更高的接触摩擦力,改善水果采摘机器人手爪手指抓取性能,进而提高采摘成功率。指尖表面仿指纹结构采用柔性材料构件,可改善水果采摘机器人手爪手指与果实之间的柔性接触,减少对果实的破坏,提高采摘无损率。
技术特征:
1.一种指尖表面仿指纹结构的设计方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的指尖表面仿指纹结构的设计方法,其特征在于:在所述步骤s1中,对所述指纹图像进行优化,是基于数字图像处理技术,采用形态学优化技术改善图像,获取优化图像。
3.根据权利要求2所述的指尖表面仿指纹结构的设计方法,其特征在于:在所述步骤s1中,所述形态学优化技术为二值化、去噪声、腐蚀、膨胀的一种或几种的优化技术。
4.一种指尖表面仿指纹结构的水果采摘机器人手爪手指,其特征在于:包括
5.根据权利要求4所述的指尖表面仿指纹结构的水果采摘机器人手爪手指,其特征在于:所述指尖表面仿指纹结构为柔性材料构件。
技术总结
本发明公开了一种指尖表面仿指纹结构的设计方法及应用其的手爪手指,涉及机器人技术领域,其中,指尖表面仿指纹结构的水果采摘机器人手爪手指,包括第一指段、第二指段及指尖表面仿指纹结构。指尖表面仿指纹结构的设计方法,包括以下步骤,采集指纹图像,进行优化获取优化图像,识别并提取所述优化图像中的指纹轮廓;基于所述指纹轮廓,借助建模软件进行重建,获得二维草图的平面指纹结构;对二维草图的所述平面指纹结构进行拉伸,获得三维结构的指纹表面结构,应用于手指指尖部位。本发明能利用指尖表面仿指纹结构改善机器人手爪与果实之间的接触,提高采摘成功率。
技术研发人员:谢卫规,谭振华,黄光辉,杨锦晨,刘旺玉
受保护的技术使用者:华南理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!