基于支持向量回归和高斯逆模型的动态拆卸线平衡方法
本发明属于拆卸线平衡,具体涉及一种基于支持向量回归和高斯逆模型的动态拆卸线平衡方法。
背景技术:
1、制造企业对废旧产品进行回收再利用,是节约资源和保护环境的有效方式。产品拆卸是实现废旧产品回收再利用的重要手段,是实现产品生命周期完整性与封闭性的必要环节。而拆卸线是实现大规模拆卸的最佳选择,因而有效设计和平衡拆卸线对提高拆卸效率至关重要。拆卸线平衡问题(disassembly line balancing problem,dlbp)考虑如何将拆卸操作分配给拆卸线上的操作员,以优化预定目标,如周期时间。
2、实际上,拆卸线中存在各种环境不确定性,如不确定的产品质量。这些不确定性使得dlbp本质上是一个动态的多目标优化问题(a dynamic multi-objective optimizationproblem,dmop)。但是目前大多数研究主要面向确定的拆卸环境,无法应对实际工业中存在的各种不确定性。
3、针对动态多目标优化问题,研究人员也提出了许多专用的动态优化算法。其中,基于预测的算法因其高性能而受到广泛关注。基于预测的动态多目标优化算法背后的基本思想是通过重用找到的高质量解决方案中的知识来帮助优化算法快速找到新环境中的帕累托最优解集。他们通常选择历史环境中的标记解和新环境中的未标记解作为训练样本,学习各种知识重用运算符,例如基于统计机器学习的预测模型和特征潜在空间。学习后的算子用来预测新环境中的好解,从而帮助优化算法及时搜索时变帕累托前沿位置。然而,现有的基于预测的决策分析使用新环境中的解作为训练样本来学习知识重用操作符,这表明操作符的学习直到新环境到来时才开始。学习过程既费时又耗资源。因此,在快速响应环境变化方面,现有的基于预测的动态多目标优化算法仍有改进的空间。
技术实现思路
1、本发明的目的就是为了解决上述背景技术存在的不足,提供一种基于支持向量回归和高斯逆模型的动态拆卸线平衡方法,通过学习历史环境中的公共知识以泛化到新的环境中,以增强对环境变化的快速反应能力,以解决在环境变化之后快速追踪到新环境下最优解集的难点,从而显著提高解的质量。
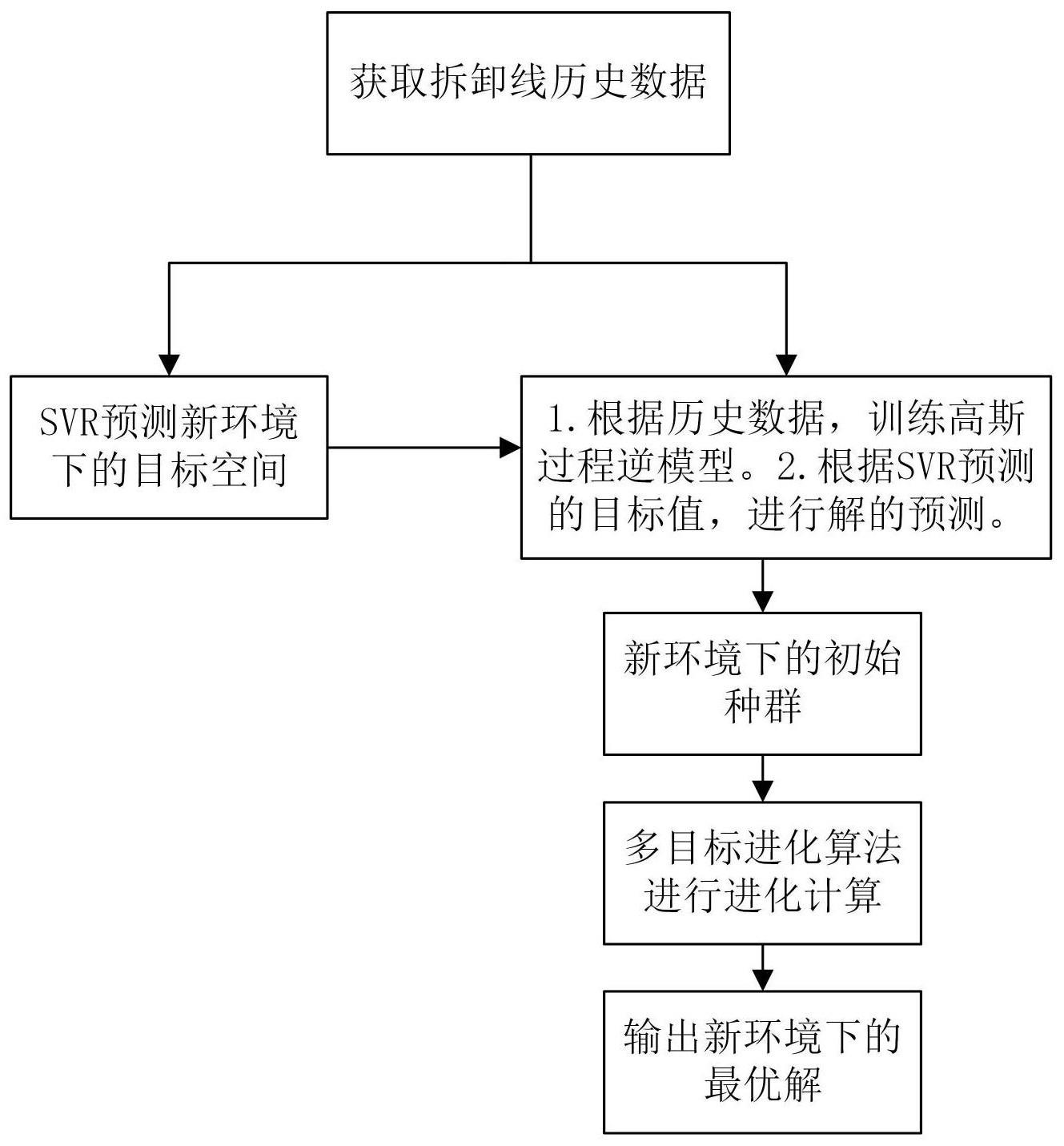
2、本发明采用的技术方案是:一种基于支持向量回归和高斯逆模型的动态拆卸线平衡方法,包括以下步骤:
3、获取拆卸线所有历史环境中的帕累托最优解集合及对应的目标值集合;所述帕累托最优解集合的单个最优解包括机器人到工作站的分配向量、任务到机器人的分配向量和任务序列向量;所述目标值集合的单个目标值包括工作站的周期时间和使用到的机器人数量;
4、使用支持向量回归方式对目标值集合进行模型训练,以预测新环境下的目标值;
5、将帕累托最优解集合和对应的目标值集合作为训练样本,建立基于高斯过程的逆模型;
6、将新环境下的目标值输入至逆模型,得到新环境下的初始种群;所述初始种群中每个个体包括3个解向量和1个目标向量;所述解向量包括机器人到工作站的分配向量、任务到机器人的分配向量和任务序列向量,所述目标向量由工作站的周期时间和使用到的机器人数量组成;
7、对生成的初始种群进行进化计算,输出新环境下的最优解。
8、上述技术方案中,将帕累托最优解集合和对应的目标值集合作为训练样本,建立基于高斯过程的逆模型的过程包括:确定高斯过程模型参数;构建高斯过程模型的逆模型;采用帕累托最优解集合和对应的目标值集合作为训练样本,训练逆模型。
9、上述技术方案中,使用支持向量回归方式对目标值集合进行模型训练,以预测新环境下的目标值的过程包括:基于新环境的变化量,选择固定目标值集合中工作站的周期时间或者使用到的机器人数量,预测其中一个的目标值参数。
10、上述技术方案中,使用支持向量回归方式对目标值集合进行模型训练,以预测新环境下的目标值的过程包括:引入超参数q;从历史序列中获得(t-q)个样本形成训练集,表示为如下公式:
11、
12、其中,拆卸线所有历史环境中的目标值集合表示为{pof(1),pof(2),…,pof(t)};其中工作站的周期时间或者使用到的机器人数量的集合表示为:每个目标集包含n个目标向量;t表示目标值集合数量;xi表示模型输入,yi表示模型输出。
13、上述技术方案中,将帕累托最优解集合和对应的目标值集合作为训练样本的过程包括:
14、所述拆卸线所有历史环境中的帕累托最优解集合表示:
15、{pos(1),pos(2),…,pos(t)},每个最优解集表示为n表示种群的大小,d表示每一个解的维度;将做为训练样本。
16、本发明的有益效果是:本发明中因为在实际工业拆卸环境中,同类产品质量往往具有相似性,利用支持向量回归(support vactor regression,svr)能够很好的找到相似拆卸环境中工作站周期时间的变化规律,在不需要新环境的信息下,预测出较低误差的工作站周期时间。在svr中,引入非线性映射以将输入数据映射到更高维的特征空间,使它们在高维空间中线性相关。svr在svm的基础上增加了松弛变量,从而使函数的间隔要求变的放松,增加了回归模型的泛化能力。本发明中,通过解向量可以算出优化的目标值,而通过高斯过程回归(gaussian process regression,gpr)模型建立目标值与解向量之间的映射关系,使本发明可以在新环境到来之前,生成高质量的初始种群,大大加快了新环境的进化过程,提高了解的质量。
17、进一步的,本发明中目标空间由使用到的机器人总数和工作站的周期时间构成,在环境发生变化时,往往只影响某一维的目标,本发明通过固定未受影响的目标值参量,提高模型整体的计算速度。
18、进一步的,历史环境中过早的值可能对的预测几乎没有贡献。本发明引入一个超参数来控制与相关的历史环境的数量。由于只有q个先前值与下一个值相关,如果向前滑动环境窗口,可以获取的更多的样本参与模型训练。
19、进一步的,本发明采用了随机分组的方法一方面减少要建立的高斯模型的数量,降低了计算的复杂度。另一方面,对于分配在同一组中的决策变量,可以隐含地考虑这些相关性,从而减轻在将m输入和n输出多变量概率分布分解成单变量概率分布时所需的对决策变量的独立性假设所导致的不准确性。
技术特征:
1.一种基于支持向量回归和高斯逆模型的动态拆卸线平衡方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种方法,其特征在于:将帕累托最优解集合和对应的目标值集合作为训练样本,建立基于高斯过程的逆模型的过程包括:确定高斯过程模型参数;构建高斯过程模型的逆模型;采用帕累托最优解集合和对应的目标值集合作为训练样本,训练逆模型。
3.根据权利要求2所述的一种方法,其特征在于:使用支持向量回归方式对目标值集合进行模型训练,以预测新环境下的目标值的过程包括:基于新环境的变化量,选择固定目标值集合中工作站的周期时间或者使用到的机器人数量,预测其中一个的目标值参数。
4.根据权利要求3所述的一种方法,其特征在于:使用支持向量回归方式对目标值集合进行模型训练,以预测新环境下的目标值的过程包括:引入超参数q;从历史序列中获得(t-q)个样本形成训练集,表示为如下公式:
5.根据权利要求4所述的一种方法,其特征在于:将帕累托最优解集合和对应的目标值集合作为训练样本的过程包括:
技术总结
本发明提供了一种基于支持向量回归和高斯逆模型的动态拆卸线平衡方法,包括以下步骤:获取拆卸线所有历史环境中的帕累托最优解集合及对应的目标值集合;最优解包括机器人到工作站的分配向量、任务到机器人的分配向量和任务序列向量;目标值包括工作站的周期时间和使用到的机器人数量;使用支持向量回归方式对目标值集合进行模型训练,以预测新环境下的目标值;将帕累托最优解集合和对应的目标值集合作为训练样本,建立基于高斯过程的逆模型;将新环境下的目标值输入至逆模型,得到新环境下的初始种群;对生成的初始种群进行进化计算,输出新环境下的最优解。本发明有效增强动态拆卸线对环境变化的快速反应能力,显著提高解的质量。
技术研发人员:方艺霖,刘福波
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!