一种基于稠密点云的集装箱特征提取方法
本发明涉及稠密点云的特征提取领,尤其涉及一种基于稠密点云的集装箱特征提取方法。
背景技术:
1、现代化港口管理不断向高科技化、信息化、网络化方向趋势发展,港口装卸设备也不断向自动化、智能化和高效化等趋势发展。
2、解决集装箱自动化定位问题方面,常见的解决方式是:通过在吊桥横梁或者吊具上安装激光扫描仪、工业相机等设备采集下方集装箱距离、结构信息和图像信息,然后使用图像分析软件进行集装箱定位并将结果返回给中控系统。随着计算机视觉技术的进步,相比于激光定位、激光雷达定位,使用工业相机进行集装箱定位更能节省成本,同时降低系统的复杂性。
3、为了避免集装箱转运过程中发生碰箱事故,蒋士正设计了一种基于激光扫描仪和视频图像技术的辅助作业系统,它通过中值滤波和分割聚类实现了集装箱边缘提取,顾沁等运用spss等光学定位系统、杨萌用二维激光扫描技术、张志勇等通过激光扫描仪获得实时堆场集装箱分布信息用于防撞;为了实现集装箱定位和测距,蔡佳俊等利用3d激光对集装箱进行扫描测距,用于调整吊具的位置、梁晓波采用bps(条码定位系统)结合激光扫描设备实现集装箱定位。
4、除此之外,还有基于rfid的集装箱定位和码头管理系统、wei l等将集装箱看作矩形区域,使用霍夫变换检测集装箱位置。jh shin等将3d人脸识别技术融合到集装箱识别中。
5、综上所述,以上各种集装箱装卸过程中的工艺在不同场景下都有着不错的效果,但是在集装箱定位和识别问题上依然存在着一些问题,例如现有集装箱识别大部分都基于边缘检测方法,同时对于集装箱定位的精确度与实时性也比较低,使得自动化定位集装箱失去了意义。
6、三维点云数据相比于二维图像数据而言包含的信息更为丰富、完整,所表示物体或场景更加直观友好,更利于让计算机理解,伴随着科技的发展,三维点云数据在各个领域如自动驾驶、机器人、高精度地图的广泛应用,越来越受到工业界和学术界的重视与青睐。
7、因此有必要提供一种基于稠密点云的集装箱特征提取方法,可以实现对目标集装箱的实时精准定位。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于稠密点云的集装箱特征提取方法。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种基于稠密点云的集装箱特征提取方法,包括以下步骤:
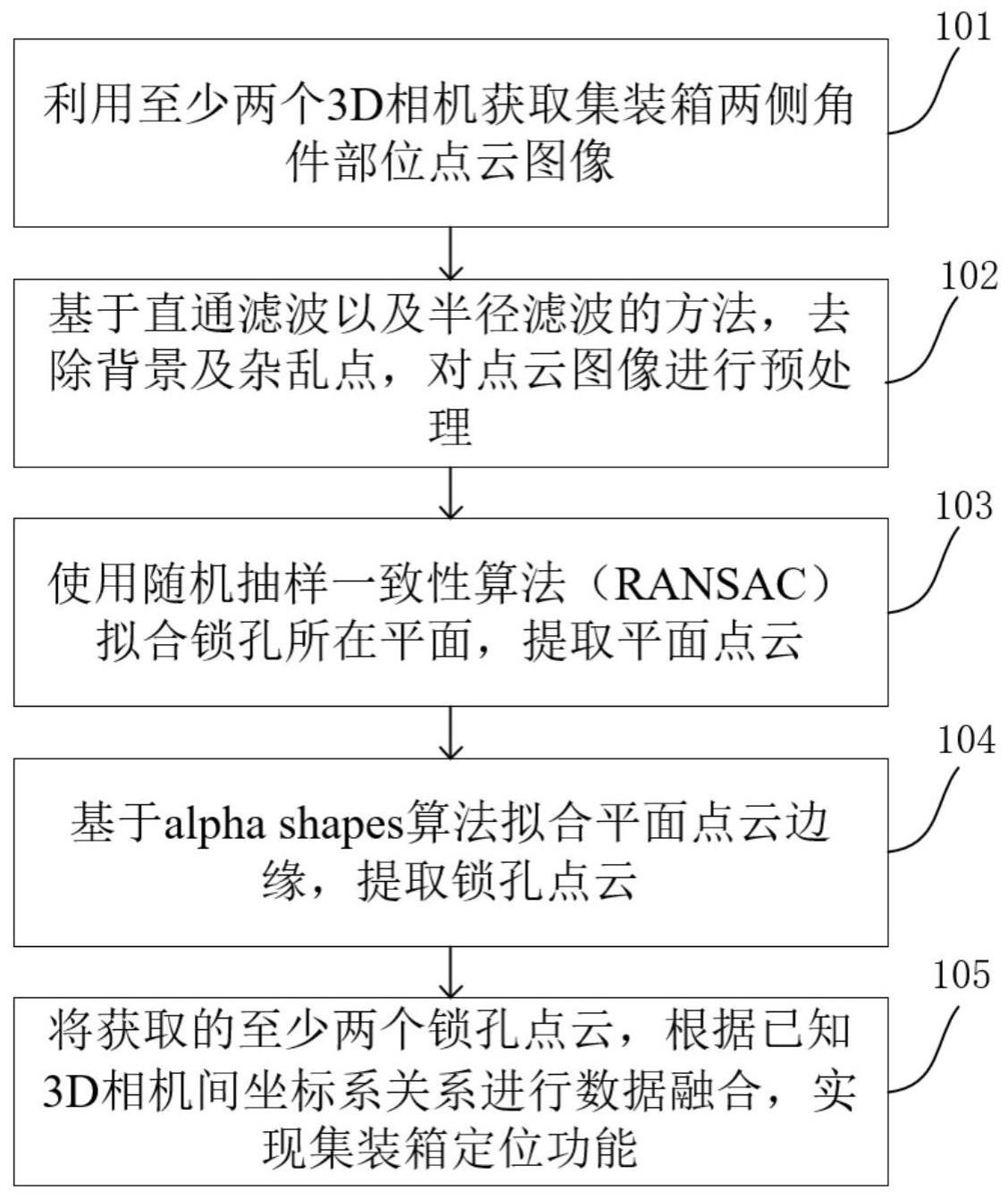
4、101、用至少两个3d相机获取集装箱两侧角件部位点云图像;
5、102、基于直通滤波以及半径滤波的方法,去除背景及杂乱点,对点云图像进行预处理;
6、103、使用随机抽样一致性算法(ransac)拟合锁孔所在平面,提取平面点云;
7、104、基于alpha shapes算法拟合平面点云边缘,提取锁孔点云;
8、105、将获取的至少两个锁孔点云,根据已知3d相机间坐标系关系进行数据融合,实现集装箱精准定位。
9、与现有技术相比,本申请通过选用相应的3d相机来获取集装箱角件部位点云图像,并充分进行处理,获取精准的平面点云,同时根据3d相机之间坐标系关系进行锁孔数据融合,以便达到根据集装箱锁孔位置数据来实现对集装箱快速定位的目的,方便现场工作人员通过相应设备快速装卸、堆放集装箱。
10、优选地,可选用两个3d相机安装于自动堆高机吊具两侧,识别集装箱顶部一侧两个锁孔,实现集装箱抓取功能,识别下层集装箱侧面锁孔,确定下层集装箱与目标集装箱相互位置关系。
11、进一步的,工作人员能根据需要选择相应数量的3d相机进行安装,实现对定位用特征数据的精准定位,从而能精准的确定下层集装箱和待吊装或堆放集装箱之间的位置关系。
12、优选地,可选用四个3d相机安装于起重机吊具四个锁针上方,识别目标集装箱四个锁孔特征,实现对集装箱的精准定位。
13、进一步的,提升3d相机的数据,有助于进一步的提升集装箱定位的精准性。
14、优选地,所述至少两个3d相机拍摄集装箱锁孔视野尽量垂直,减少对锁孔成像畸变。
15、进一步的,通过提升安装的质量来保证拍摄的质量,以便进一步的提升后续集装箱定位的精准性。
16、优选地,所述至少两个3d相机拍摄集装箱锁孔要占据视野比例合适,提高对锁孔成像精度。
17、进一步的,通过控制拍摄画面中锁孔成像质量,有助于为后续定位计算提供更精准的数据支撑。
18、优选地,所述至少两个3d相机拍摄数据同步,可以有效避免因晃动等外部因素影响集装箱的定位误差。
19、进一步的,通过使两个或是两个以上3d相机拍摄数据的同步性来实现多方位提升数据质量,有效降低集装箱的定位误差。
20、优选地,所述目标集装箱的预估位置选取点云roi,去除明显未打在所述目标集装箱上的点云数据。
21、进一步的,通过降低数据的偏差来提升计算用数据的质量,从而能更好的对集装箱进行定位。
22、优选地,可将整个锁孔所在平面点云投影到拟合的锁孔所在平面,使锁孔处点云较为整齐。
23、进一步的,通过提升锁孔点云定位的精准度,以此来提升集装箱定位的精准度。
24、综上所述,本发明提供的基于稠密点云的集装箱特征提取方法,通过3d相机获取集装箱两侧角件部位点云图像,对点云图像处理,获取锁孔点云,并根据3d相机之间坐标系关系进行锁孔数据融合,从而根据集装箱锁孔特征,帮助实现对集装箱快速定位功能,适用于起重机自动装卸集装箱及堆场堆高机自动堆放集装箱等多种场景。
技术特征:
1.一种基于稠密点云的集装箱特征提取方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于稠密点云的集装箱特征提取方法,其特征在于:可选用两个3d相机安装于自动堆高机吊具两侧,识别集装箱顶部一侧两个锁孔,实现集装箱抓取功能,识别下层集装箱侧面锁孔,确定下层集装箱与目标集装箱相互位置关系。
3.根据权利要求1所述的一种基于稠密点云的集装箱特征提取方法,其特征在于:可选用四个3d相机安装于起重机吊具四个锁针上方,识别目标集装箱四个锁孔特征,实现对集装箱的精准定位。
4.根据权利要求1所述的一种基于稠密点云的集装箱特征提取方法,其特征在于:所述至少两个3d相机拍摄集装箱锁孔视野尽量垂直,减少对锁孔成像畸变。
5.根据权利要求1所述的一种基于稠密点云的集装箱特征提取方法,其特征在于:所述至少两个3d相机拍摄集装箱锁孔要占据视野比例合适,提高对锁孔成像精度。
6.根据权利要求1所述的一种基于稠密点云的集装箱特征提取方法,其特征在于:所述至少两个3d相机拍摄数据同步,可以有效避免因晃动等外部因素影响集装箱的定位误差。
7.根据权利要求1所述的一种基于稠密点云的集装箱特征提取方法,其特征在于:所述目标集装箱的预估位置选取点云roi,去除明显未打在所述目标集装箱上的点云数据。
8.根据权利要求1所述的一种基于稠密点云的集装箱特征提取方法,其特征在于:可将整个锁孔所在平面点云投影到拟合的锁孔所在平面,使锁孔处点云较为整齐。
技术总结
本发明公开了一种基于稠密点云的集装箱特征提取方法,包括以下步骤:101、用至少两个3D相机获取集装箱两侧角件部位点云图像;102、基于直通滤波以及半径滤波的方法,去除背景及杂乱点,对点云图像进行预处理;103、使用随机抽样一致性算法(RANSAC)拟合锁孔所在平面,提取平面点云。本发明提供的基于稠密点云的集装箱特征提取方法,通过3D相机获取集装箱两侧角件部位点云图像,对点云图像处理,获取锁孔点云,并根据3D相机之间坐标系关系进行锁孔数据融合,从而根据集装箱锁孔特征,帮助实现对集装箱快速定位功能,适用于起重机自动装卸集装箱及堆场堆高机自动堆放集装箱等多种场景。
技术研发人员:王海霞,李学艺,张治国,朱伟,张华宇,杨通,卢晓,袁万斐
受保护的技术使用者:山东科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!