一种任务确定方法、装置、设备和存储介质与流程
本发明实施例涉及仓储管理,尤其涉及一种任务确定方法、装置、设备和存储介质。
背景技术:
1、在仓储物流的正向出库系统场景中,主要采用的是多级系统分层的方式,例如上层的wms(warehouse management system,仓储管理系统),到iwms(intelligentwarehouse management system,智能仓储管理系统),到rcs(robot control system,机器人控制系统)。
2、现有系统中,订单数据流为wms→iwms→rcs,由wms-iwms以及iwms-rcs这两段的系统功能分别实现组单和排产,组单是将一组或多组订单或者任务形成一组或多组任务单据给到机器人组,排产是将这一组或多组任务单据分配给具体的机器人来执行,并且形成包含先后执行顺序的任务明细。具体通过wms-iwms根据订单重合度实现组单功能,通过iwms-rcs根据拣选机器人的预设搬运能力实现排产功能。
3、然而,在实现本发明过程中,发现现有技术中至少存在如下问题:
4、现有的拣选环节,由于各个系统分层明显,导致缺少反馈机制来优化提升拣货效率,例如任务一旦被执行下发之后就不会被修正,造成拣选机器人发生重复路径拣选,从而导致拣货效率低下。
技术实现思路
1、本发明实施例提供了一种任务确定方法、装置、设备和存储介质,以在每一时刻为搬运设备确定合理的出库方案,降低拣选机器人的无效移动距离,提高拣选效率。
2、第一方面,本发明实施例提供了一种任务确定方法,应用于出库协作系统,所述方法包括:
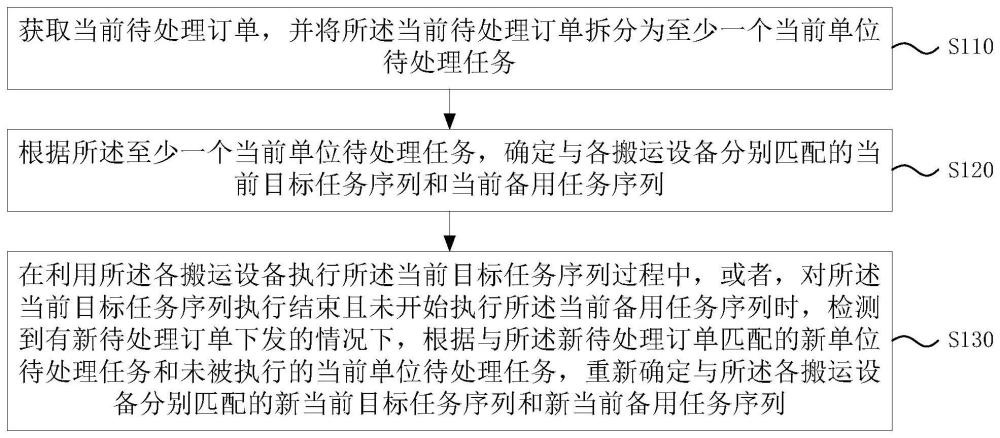
3、获取当前待处理订单,并将所述当前待处理订单拆分为至少一个当前单位待处理任务;
4、根据所述至少一个当前单位待处理任务,确定与各搬运设备分别匹配的当前目标任务序列和当前备用任务序列;
5、在利用所述各搬运设备执行所述当前目标任务序列过程中,或者,对所述当前目标任务序列执行结束且未开始执行所述当前备用任务序列时,检测到有新待处理订单下发的情况下,根据与所述新待处理订单匹配的新单位待处理任务和未被执行的当前单位待处理任务,重新确定与所述各搬运设备分别匹配的新当前目标任务序列和新当前备用任务序列。
6、第二方面,本发明实施例还提供了一种任务确定装置,应用于出库协作系统,该装置包括:
7、当前单位待处理任务获取模块,用于获取当前待处理订单,并将所述当前待处理订单拆分为至少一个当前单位待处理任务;
8、当前任务序列确定模块,用于根据所述至少一个当前单位待处理任务,确定与各搬运设备分别匹配的当前目标任务序列和当前备用任务序列;
9、新任务序列确定模块,用于在利用所述各搬运设备执行所述当前目标任务序列过程中,或者,对所述当前目标任务序列执行结束且未开始执行所述当前备用任务序列时,检测到有新待处理订单下发的情况下,根据与所述新待处理订单匹配的新单位待处理任务和未被执行的当前单位待处理任务,重新确定与所述各搬运设备分别匹配的新当前目标任务序列和新当前备用任务序列。
10、第三方面,本发明实施例提供了一种电子设备,所述电子设备包括:
11、一个或多个处理器;
12、存储器,用于存储一个或多个程序;
13、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如本发明任意实施例所提供的任务确定方法。
14、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明任意实施例所提供的任务确定方法。
15、上述发明中的实施例具有如下优点或有益效果:
16、本发明实施例的技术方案,应用于出库协作系统,通过获取当前待处理订单,并将当前待处理订单拆分为至少一个当前单位待处理任务;根据至少一个当前单位待处理任务,确定与各搬运设备分别匹配的当前目标任务序列和当前备用任务序列;在利用各搬运设备执行当前目标任务序列过程中,或者,对当前目标任务序列执行结束且未开始执行当前备用任务序列时,检测到有新待处理订单下发的情况下,根据与新待处理订单匹配的新单位待处理任务和未被执行的当前单位待处理任务,重新确定与各搬运设备分别匹配的新当前目标任务序列和新当前备用任务序列,解决现有技术中由于仓储物流的各个系统分层明显缺少反馈机制使任务一旦下发后无法修正,造成拣选机器人发生重复路径拣选,从而导致拣货效率低下的问题,在每一时刻为拣选机器人确定合理的出库方案,降低拣选机器人的无效移动距离,提高拣选效率。
技术特征:
1.一种任务确定方法,应用于出库协作系统,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,将所述当前待处理订单拆分为至少一个当前单位待处理任务,包括:
3.根据权利要求2所述的方法,其特征在于,根据所述至少一个当前单位待处理任务,确定与各搬运设备分别匹配的当前目标任务序列和当前备用任务序列,包括:
4.根据权利要求3所述的方法,其特征在于,所述目标储位描述信息包括目标储位在所述预处理仓库中的第一位置信息和目标储位的遮挡情况描述信息;
5.根据权利要求4所述的方法,其特征在于,根据所述当前待拣选物品的重合度对所述当前单位待处理任务进行组单操作,获取组单方案,包括:
6.根据权利要求4所述的方法,其特征在于,根据所述组单方案、所述遮挡情况描述信息、所述当前位置信息和所述当前剩余搬运能力,对所述组单方案中的待执行任务进行排产操作,获取全部排产方案,包括:
7.根据权利要求6所述的方法,其特征在于,根据所述遮挡情况描述信息和所述当前剩余搬运能力,确定所述各搬运设备在所述目标储位对所述当前待拣选物品的目标搬运方式,包括:
8.根据权利要求7所述的方法,其特征在于,根据所述当前剩余搬运能力确定所述目标搬运方式,包括:
9.根据权利要求1所述的方法,其特征在于,在利用所述各搬运设备执行所述当前目标任务序列过程中,检测到有新待处理订单下发的情况下,根据与所述新待处理订单匹配的新单位待处理任务和未被执行的当前单位待处理任务,重新确定与各搬运设备分别匹配的新当前目标任务序列和新当前备用任务序列,包括:
10.根据权利要求1所述的方法,其特征在于,对所述当前目标任务序列执行结束且未开始执行所述当前备用任务序列时,检测到有新待处理订单下发的情况下,根据与所述新待处理订单匹配的新单位待处理任务和未被执行的当前单位待处理任务,重新确定与所述各搬运设备分别匹配的新当前目标任务序列和新当前备用任务序列,包括:
11.一种任务确定装置,应用于出库协作系统,其特征在于,包括:
12.一种电子设备,其特征在于,所述电子设备包括:
13.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-10中任一所述的任务确定方法。
技术总结
本发明实施例公开了一种任务确定方法、装置、设备和存储介质,涉及仓储管理技术领域,该方法应用于出库协作系统,该方法包括:将当前待处理订单拆分为当前单位待处理任务;根据当前单位待处理任务,确定各搬运设备的当前目标任务序列和当前备用任务序列;在利用各搬运设备执行当前目标任务序列过程中,或,对当前目标任务序列执行结束且未开始执行当前备用任务序列时,检测到新待处理订单,根据与新待处理订单匹配的新单位待处理任务和未被执行的当前单位待处理任务,重新确定新当前目标任务序列和新当前备用任务序列。采用本发明实施例的技术方案,在每一时刻为拣选机器人确定合理的出库方案,降低拣选机器人的无效移动距离,提高拣选效率。
技术研发人员:赵虎
受保护的技术使用者:北京京东振世信息技术有限公司
技术研发日:
技术公布日:2024/8/21
- 还没有人留言评论。精彩留言会获得点赞!