电路直流仿真步长确定方法及装置
本申请涉及电路分析,尤其涉及一种电路直流仿真步长确定方法及装置。
背景技术:
1、电路仿真中的直流分析作为电路其他分析的基础显得异常重要。在直流分析中,如图1所示的伪瞬态分析(pta)法成为目前非线性电路直流分析仿真的研究热点。该方法使用隐式积分方法来求解描述电路行为与性能的一系列微分代数方程组(以下简称pta方程组)。
2、值得关注的是,pta中的时间步长并不是由精度因素决定的。相反,只要牛顿-拉弗森(nr)方法能够收敛,就可以尽可能选择较大的时间步长。快速确定每次nr迭代收敛时所对应的最大时间步长,有助于pta尽快收敛,从而完成电路仿真中的直流分析。
3、然而,现有技术缺乏加速pta收敛的方法。
技术实现思路
1、本申请实施例提供一种电路直流仿真步长确定方法及装置,可以加快电路仿真中的直流分析速度,提高电路仿真中的直流分析效率。
2、第一方面,本申请实施例提供一种电路直流仿真步长确定方法,包括:
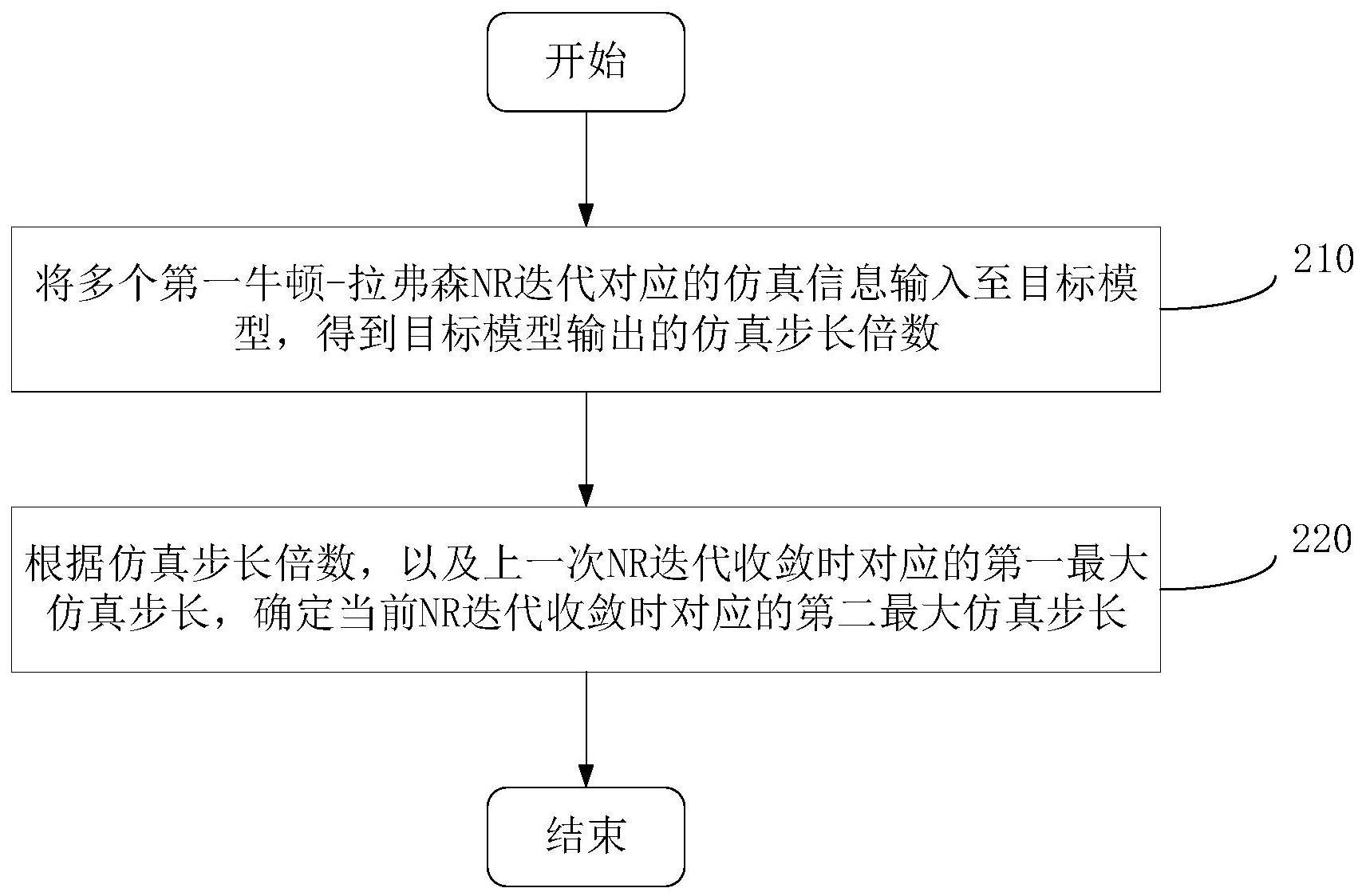
3、将多个第一牛顿-拉弗森nr迭代对应的仿真信息输入至目标模型,得到目标模型输出的仿真步长倍数;
4、根据所述仿真步长倍数,以及上一次nr迭代收敛时对应的第一最大仿真步长,确定当前nr迭代收敛时对应的第二最大仿真步长;
5、其中,所述第一nr迭代是在所述当前nr迭代之前进行的;所述多个第一nr迭代包括所述上一次nr迭代;
6、所述仿真信息包括:
7、nr迭代次数,表征nr迭代收敛时的迭代次数;
8、方程组残差,表征伪瞬态分析pta方程组在nr迭代中的解距离真实解的程度;
9、解的变化趋势,表征nr迭代收敛时最大仿真步长相邻的pta方程组的解的变化趋势;
10、上一步的时间步长,表征nr迭代的上一次nr迭代所对应的最大仿真步长。
11、在一个实施例中,所述目标模型是通过如下方式训练的:
12、将多个第一nr迭代对应的仿真信息作为样本,所述多个第一nr迭代对应的仿真步长倍数作为标签,对初始模型进行训练,得到所述目标模型。
13、在一个实施例中,所述将多个第一nr迭代对应的仿真信息输入至目标模型,包括:
14、对所述多个第一nr迭代对应的仿真信息进行归一化处理,并将归一化处理后的仿真信息输入至所述目标模型。
15、在一个实施例中,所述方程组残差通过如下公式表达:
16、
17、其中,res代表所述方程组残差,x代表某一时刻的电路的解向量,t代表仿真中的虚拟时间点。
18、在一个实施例中,所述nr迭代收敛时对应的最大仿真步长是通过如下方式确定的:
19、在所述nr迭代收敛,且当前的仿真步长等于预设仿真步长的情况下,将所述当前的仿真步长作为所述nr迭代收敛时对应的最大仿真步长;
20、在所述nr迭代不收敛,且当前的仿真步长小于预设仿真步长的情况下,通过如下方式确定下一次nr迭代对应的仿真步长:
21、确定所述当前的仿真步长所属的步长区间;
22、将所述当前的仿真步长与所述步长区间对应的粒度之差,作为所述下一次nr迭代对应的仿真步长;
23、进行所述下一次nr迭代,直至nr迭代收敛,将此时的仿真步长作为所述nr迭代收敛时对应的最大仿真步长;
24、其中,所述步长区间对应的取值越大,则所述步长区间对应的粒度越大。
25、在一个实施例中,所述目标模型是基于长短期记忆网络lstm构建的。
26、第二方面,本申请实施例提供一种电路直流仿真步长确定装置,包括:
27、输入模块,用于将多个第一牛顿-拉弗森nr迭代对应的仿真信息输入至目标模型,得到目标模型输出的仿真步长倍数;
28、确定模块,用于根据所述仿真步长倍数,以及上一次nr迭代收敛时对应的第一最大仿真步长,确定当前nr迭代收敛时对应的第二最大仿真步长;
29、其中,所述第一nr迭代是在所述当前nr迭代之前进行的;所述多个第一nr迭代包括所述上一次nr迭代;
30、所述仿真信息包括:
31、nr迭代次数,表征nr迭代收敛时的迭代次数;
32、方程组残差,表征伪瞬态分析pta方程组在nr迭代中的解距离真实解的程度;
33、解的变化趋势,表征nr迭代收敛时最大仿真步长两端的pta方程组的解的变化趋势;
34、上一步的时间步长,表征nr迭代的上一次nr迭代所对应的最大仿真步长。
35、第三方面,本申请还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第一方面所述的方法。
36、第四方面,本申请还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如第一方面所述的方法。
37、第五方面,本申请还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现第一方面所述的方法。
38、本申请实施例提供的电路直流仿真步长确定方法及装置,通过牛顿-拉弗森nr迭代对应的仿真信息来预测当前仿真步长倍数从而确定仿真步长。一方面,预测仿真步长倍数而非预测仿真步长降低了目标模型的学习成本,提高了模型预测的精确度,加快了训练阶段模型的收敛速度,大幅度地减少了训练阶段的时间代价消耗;另一方面,利用目标模型确定仿真步长减少了nr迭代的次数,提高了nr迭代的效率,从而提高了pta迭代的效率。因而,本申请提出的技术方案可以加快电路仿真中的直流分析速度,提高电路仿真中的直流分析效率。
技术特征:
1.一种电路直流仿真步长确定方法,其特征在于,包括:
2.根据权利要求1所述的电路直流仿真步长确定方法,其特征在于,所述目标模型是通过如下方式训练的:
3.根据权利要求1所述的电路直流仿真步长确定方法,其特征在于,所述将多个第一nr迭代对应的仿真信息输入至目标模型,包括:
4.根据权利要求1所述的电路直流仿真步长确定方法,其特征在于,所述方程组残差通过如下公式表达:
5.根据权利要求1所述的电路直流仿真步长确定方法,其特征在于,所述nr迭代收敛时对应的最大仿真步长是通过如下方式确定的:
6.根据权利要求1至5任一项所述的电路直流仿真步长确定方法,其特征在于,所述目标模型是基于长短期记忆网络lstm构建的。
7.一种电路直流仿真步长确定装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述的电路直流仿真步长确定方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的电路直流仿真步长确定方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的电路直流仿真步长确定方法。
技术总结
本申请提供一种电路直流仿真步长确定方法及装置,涉及电路分析技术领域。所述方法包括:将多个第一牛顿‑拉弗森NR迭代对应的仿真信息输入至目标模型,得到目标模型输出的仿真步长倍数;根据仿真步长倍数,以及上一次NR迭代收敛时对应的第一最大仿真步长,确定当前NR迭代收敛时对应的第二最大仿真步长。本申请实施例提供的电路直流仿真步长确定方法及装置,可以加快电路仿真中的直流分析速度,提高电路仿真中的直流分析效率。
技术研发人员:金洲,裴浩杰,冯田,查夏如
受保护的技术使用者:中国石油大学(北京)
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!