一种基于2D卷积神经网络与改进蚁群算法的三七收获机卸粮过程的路径规划方法
本发明涉及一种基于2d卷积神经网络与改进蚁群算法的路径规划方法,属于农业机械智能化领域。
背景技术:
1、三七多生长于丘陵山区地带,且大多沿坡度种植。三七生长的地理环境复杂,在其收获过程中,工人需要长时间高度集中地驾驶收获机械,增加工人的劳动强度,易对三七造成损伤,影响三七品质。随着无人驾驶技术的快速发展,其在多个行业都得到了广泛应用,农业工程领域也不例外。将无人驾驶技术应用于三七收获机上可以有效解决上述因人工操纵失误所带来的一系列问题,极大的提高生产效率与收获质量。
2、三七联合收获机的卸粮是其中的一项重要任务,需要将收获完成的三七运输到指定的地点,完成卸粮任务。通过无人驾驶技术实现这一过程大致分为三个部分:感知、规划与控制,主要解决“我在哪?”、“去哪里?”、“怎么去?”的问题。其中路径规划相当于人的大脑,通过对感知到的数据进行分析处理,规化出一条合理的最优路径。
3、而想要实现路径规划,需要解决全部环境信息已知的全局路径规划以及环境信息完全未知或部分已知的局部路径规划两大问题。实现全局路径规划的算法主要有:以dijkstra算法,a*算法为代表的启发式算法,但存在着计算效率低,消耗时间长等缺点。以受鸟群觅食行为启发而提出的量子算法和模拟自然界蚂蚁觅食行为而提出的蚁群算法为代表的智能优化算法,但量子算法存在局部最优解、后期收敛速度慢等缺点。蚁群算法虽然有着鲁棒性强、全局寻优能力强、易与其他智能方法相结合等优点,但其因为早熟收敛,可能会发生局部最优,并且收敛速度慢,消耗时间长。
技术实现思路
1、针对现有路径规划技术中存在的问题,提供一种适合三七收获机快速规划从当前位置到卸粮位置的全局路径规划方法,能够完成对三七田内复杂环境下的路径规划,并且有着强的鲁棒性,以及较高的效率。
2、本发明提供一种基于2d卷积神经网络与改进蚁群算法的路径规划方法,其特征在于,包括如下步骤:
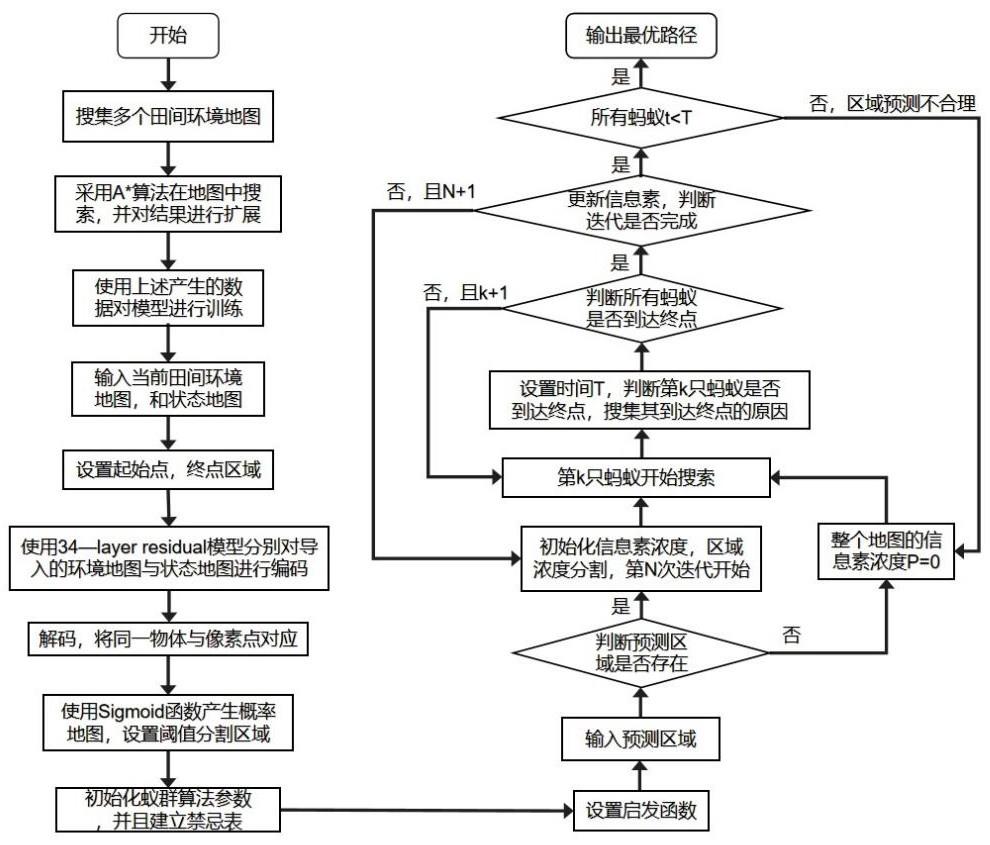
3、步骤1、建立卷积神经网络模型函数,训练模型求出存在最优路径的区域p。
4、(1.1)搜集三七收获时的多套田间环境地图,由于在三七田内,高度空间变化较小,故将田间环境简化为2维环境。
5、(1.2)使用a*算法在收集到的每一套随机环境地图中生成一条合理的路径并将所产生的路径进行扩展。
6、(1.3)使用上述(1.2)中生成的数据对创建的模型进行训练。
7、(1.4)向(1.3)中训练好的模型内分别输入大小为224×224的两套地图,分别为包含当前状态下的田间环境地图e以及包含起始点和终止点的状态地图s。
8、(1.5)将满载的三七收获机当前位置设置为起始点,将卸粮位置设置为终止点。由于起始点和终止点所占的比例较小,故将其在地图中设置为3×3大小的区域。
9、(1.6)使用34—layer residual模型分别对导入的环境地图与状态地图进行编码。
10、(1.7)对(1.6)的结果进行解码工作,将同一物体对应到相应的像素点上。
11、(1.8)使用sigmoid函数 构造概率地图,并设置阈值用于分割预测区域。
12、步骤2、改进蚁群算法,完成对最优路径的搜索。
13、(2.1)设置改进蚁群算法的初始化参数,建立禁忌表forbidak,表中存放障碍物节点与搜索过程中上一个节点。
14、(2.2)设置启发函数。引入当前节点i到下一位置的目标节点j的最短距离启发函数,但当在整个概率公式p中的权重增大时会使算法陷入局部最优。故引入全局启发函数,,其中do,j表示蚂蚁所走过的路径长度,dj,e表示目标j节点到终点e的最短距离。对搜索过程中的节点赋予相应的代价值c,避免因全局启发函数产生的当前方都是障碍物时,但该节点产生的全局函数最小,算法沿着该路径一直搜索直到停止才向其他方向进行搜索的情况。
15、(2.4)输入预测区域。
16、(2.5)判断预测区域是否存在。如果步骤1中的预测区域存在,执行(2.6),否则执行(2.13)。
17、(2.6)初始化信息素浓度,将预测区域的信息素浓度值设置为一致大小为c1=4q,进行地图区域分割,第n次迭代开始。
18、(2.7)第k只蚂蚁开始寻找路径,根据概率,求得蚂蚁接下将会行走节点的概率。其中为便于计算,设定蚂蚁只能在其周围相邻的8个节点内移动。公式为当前环境下i和j节点之间的信息素浓度值,=+c1。式中c1为预测区域信息素浓度值,表示本次搜索前路段(i, j)的信息素浓度。当本次迭代n完成后对整个田间环境内的信息素浓度值进行更新,但用于区分预测区域与整个地图的初始信息素值c1不会挥发。信息素浓度值更新依,其中。
19、(2.8)判断蚂蚁是否到达终点。给定时间t,每只蚂蚁完成搜索的时间t<=t时视为搜索完成。当蚂蚁搜索时间t>t时停止搜索,也视为搜索完成,但其所留下的信息素浓度值设置为0。
20、(2.9)判断所有蚂蚁是否都到达终点,若是则执行步骤(2.10)。否则退回到步骤(2.7),并且k+1。
21、(2.10)判断迭代是否完成,如果完成则执行(2.11),如果未完成,信息素进行更新,回到步骤(2.6)同时n+1。
22、(2.11)判断本次路径搜索完成原因,当路径中的所有蚂蚁均在t时刻内未到达终点,则视为预测区域“不可信”,将去除预测区域内的信息素,系统重新按照(2.13)进行路径搜索。若不为上述情况,则进行步骤(2.12)。
23、(2.12)输出最优路径。
24、(2.13)当步骤1中的预测区域未找到时。
25、(2.14)第n次迭代开始,执行步骤(2.7)。
26、(2.15)判断蚂蚁是否到达终点,搜集其到达终点的原因。
27、(2.16)判断所有蚂蚁是否到达终点,若是则执行步骤(2.17),若不是则回到(2.14),并且k+1。
28、(2.17)更新信息素浓度值,判断迭代是否完成,如果完成执行步骤(2.18),否则退回步骤(2.14),且n+1。
29、(2.18)搜索完成,输出最优路径。
技术特征:
1.一种基于2d卷积神经网络与改进蚁群算法的三七收获机卸粮过程的路径规划方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于2d卷积神经网络与改进蚁群算法的三七收获机卸粮过程的路径规划方法,其特征在于:步骤(2.7)中蚂蚁一次迭代释放的信息度总量q=10,信息度挥发系数和障碍物代价值影响因子取值范围为(0,1),信息素重要程度因子,发函数重要程度因子的取值范围为(0,5)。
技术总结
本发明提供一种基于2D卷积神经网络与改进蚁群算法的三七收获机卸粮过程的路径规划方法,属于农业机械智能化领域。本发明包括建立可以获取三七收获环境中存在可行区域的2D卷积神经网络预测模型,以及改进蚁群算法,在含有预测区域的地图中完成对最优路径的搜索。本发明可以满足在三七收获田间根据三七联合收获机的当前位置和卸粮位置快速规划出一条最优的可行路径,同时保证规划的路径具有较高的准确性、较强的稳定性等特点,适合应用于在丘陵山区复杂田间环境中无人驾驶作业的机械。
技术研发人员:王法安,王博洋,张兆国,解开婷,刘新琦,王媛,李漫漫
受保护的技术使用者:昆明理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!