一种应用群体机器人的灾后救援方法、系统及设备
本发明涉及灾后救援,特别涉及一种应用群体机器人的灾后救援方法、系统及设备。
背景技术:
1、近些年来,利用机器人执行灾后救援任务已经得到越来越多学者的关注。灾后救援作为一项复杂的系统工程,涉及调度指挥、物资配送、探测感知等诸多领域的研究。由于灾后环境充满着未知性和危险性,人们逐渐将目光投向了救援机器人,希望能通过机器人来完成危险未知环境下的救援工作。在实际的灾后救援场景中,全局的信息是未知的,需要救援机器人自己去探索前方环境、克服崎岖路面的影响并且避开可能存在的障碍物阻挡,在这种情况下,需要救援机器人寻找到被困人群并且将救援物资及时送达到指定区域。在这个过程中,机器人需要具备一定的避障、越野和运动规划能力,可以根据动态变化的环境来对自身的运动状态及时进行调整。此外对于一些狭小空间,救护人员或者大型机器人无法进入探测,此时小型的群体机器人更能发挥其优势。同时,要将设计的小型的群体机器人应用到实际的灾后救援问题中,必须同时保证小型的群体机器人的多个性能如可靠性、高效性和低耗能等,才能最大程度地避免人员伤亡和财产损失。
技术实现思路
1、基于此,本发明的目的是提供一种应用群体机器人的灾后救援方法、系统及设备,用以在灾后救援中最大程度地避免人员伤亡和财产损失。
2、为实现上述目的,本发明提供了如下方案:
3、一种应用群体机器人的灾后救援方法,包括:
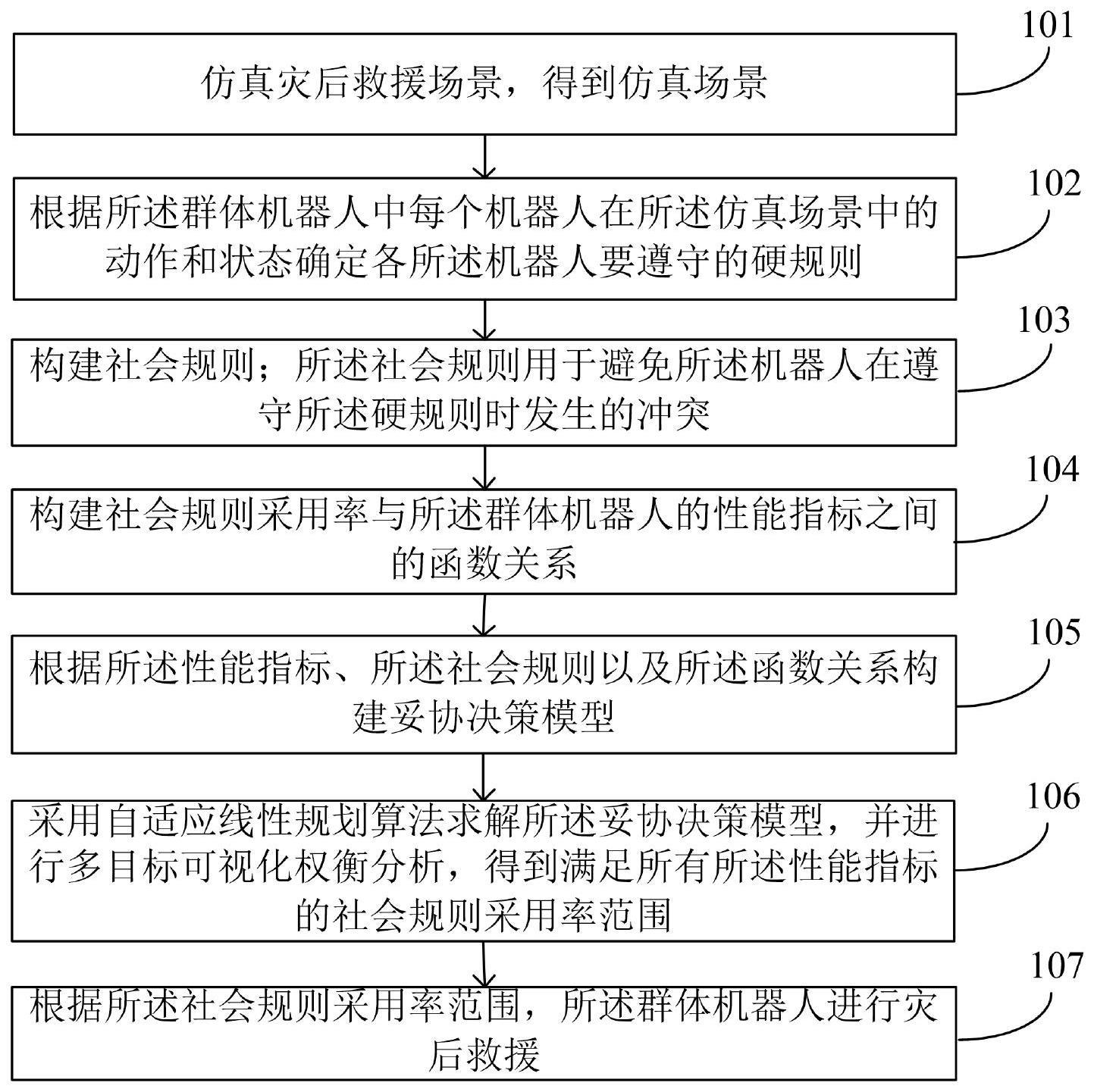
4、仿真灾后救援场景,得到仿真场景;
5、根据所述群体机器人中每个机器人在所述仿真场景中的动作和状态确定各所述机器人要遵守的硬规则;
6、构建社会规则;所述社会规则用于避免所述机器人在遵守所述硬规则时发生的冲突;
7、构建社会规则采用率与所述群体机器人的性能指标之间的函数关系;所述社会规则采用率为所述机器人在遵守所述硬规则时发生冲突后采用对应的社会规则的概率;所述性能指标包括:所述群体机器人进行灾后救援的总时间、总路程和成功率;
8、根据所述性能指标、所述社会规则以及所述函数关系构建妥协决策模型;
9、采用自适应线性规划算法求解所述妥协决策模型,并进行多目标可视化权衡分析,得到满足所有所述性能指标的社会规则采用率范围;
10、根据所述社会规则采用率范围,所述群体机器人进行灾后救援。
11、可选地,所述构建社会规则,具体包括:
12、确定所述群体机器人中机器人之间的冲突类型;
13、根据所述冲突类型确定所述机器人避免冲突发生需要执行的动作;
14、根据所述机器人避免冲突发生需要执行的动作构建社会规则。
15、可选地,所述社会规则social rule的表达式如下:
16、social rule=<c,desa,reca>
17、其中,c为触发社会规则的冲突,desa为冲突发生时机器人执行的动作,reca为避免冲突发生时推荐机器人应执行的动作。
18、可选地,构建社会规则采用率与所述群体机器人的性能指标之间的函数关系,具体包括:
19、采集多个不同社会规则采用率组合下的多个性能指标的样本数据;
20、根据所述样本数据,采用基于响应面法的映射关系方法拟合所述社会规则采用率和所述性能指标之间的函数关系。
21、可选地,采用自适应线性规划算法求解所述妥协决策模型,并进行多目标可视化权衡分析,得到满足所有所述性能指标的社会规则采用率范围,具体包括:
22、采用自适应线性规划算法求解所述妥协决策模型,得到不同的权重组合情况下满足最小偏差的单个性能指标;
23、绘制满足最小偏差的单个性能指标的三元图,并划分可接受范围;
24、叠加所有满足最小偏差的单个性能指标的三元图,叠加后的三元图中可接受范围的重合部分为满足最小偏差的所有性能指标的可接受范围;
25、根据满足最小偏差的所有性能指标的可接受范围确定满足所有所述性能指标的社会规则采用率范围。
26、本发明还提供了一种应用群体机器人的灾后救援系统,包括:
27、仿真模块,用于仿真灾后救援场景,得到仿真场景;
28、硬规则构建模块,用于根据所述群体机器人中每个机器人在所述仿真场景中的动作和状态确定各所述机器人要遵守的硬规则;
29、社会规则构建模块,用于构建社会规则;所述社会规则用于避免所述机器人在遵守所述硬规则时发生的冲突;
30、函数关系构建模块,用于构建社会规则采用率与所述群体机器人的性能指标之间的函数关系;所述社会规则采用率为所述机器人在遵守所述硬规则时发生冲突后采用对应的社会规则的概率;所述性能指标包括:所述群体机器人进行灾后救援的总时间、总路程和成功率;
31、妥协决策模型构建模块,用于根据所述性能指标、所述社会规则以及所述函数关系构建妥协决策模型;
32、求解模块,用于采用自适应线性规划算法求解所述妥协决策模型,并进行多目标可视化权衡分析,得到满足所有所述性能指标的社会规则采用率范围;
33、执行模块,用于根据所述社会规则采用率范围,所述群体机器人进行灾后救援。
34、本发明还提供了一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述应用群体机器人的灾后救援方法。
35、本发明还提供了一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述应用群体机器人的灾后救援方法。
36、根据本发明提供的具体实施例,本发明公开了以下技术效果:
37、(1)本发明引入社会规则和社会规则采用率来解决群体机器人的冲突,不仅从侧面表征机器人的自治度,实现了机器人自治度的量化。
38、(2)本发明基于硬规则初步设计出能够实现任务的群体机器人,之后通过分析冲突再制定相应的社会规则,选择合适的采用率,逐步完善群体机器人,从而能够更加快速有效地进行灾后救援。
39、(3)本发明使用妥协决策模型探索一定区间范围内的满意解,不仅解决了多个相互冲突性能指标耦合的问题,同时也使得群体机器人更具适应性和鲁棒性。
技术特征:
1.一种应用群体机器人的灾后救援方法,其特征在于,包括:
2.根据权利要求1所述的应用群体机器人的灾后救援方法,其特征在于,所述构建社会规则,具体包括:
3.根据权利要求1所述的应用群体机器人的灾后救援方法,其特征在于,所述社会规则social rule的表达式如下:
4.根据权利要求1所述的应用群体机器人的灾后救援方法,其特征在于,构建社会规则采用率与所述群体机器人的性能指标之间的函数关系,具体包括:
5.根据权利要求1所述的应用群体机器人的灾后救援方法,其特征在于,采用自适应线性规划算法求解所述妥协决策模型,并进行多目标可视化权衡分析,得到满足所有所述性能指标的社会规则采用率范围,具体包括:
6.一种应用群体机器人的灾后救援系统,其特征在于,包括:
7.一种电子设备,其特征在于,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行权利要求1-5中任一项所述的应用群体机器人的灾后救援方法。
8.一种计算机可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1-5中任一项所述的应用群体机器人的灾后救援方法。
技术总结
本发明公开了一种应用群体机器人的灾后救援方法、系统及设备。该方法包括:仿真灾后救援场景;根据所述群体机器人中每个机器人在所述仿真场景中的动作和状态确定各所述机器人要遵守的硬规则;构建社会规则采用率与所述群体机器人的性能指标之间的函数关系;根据所述性能指标、所述社会规则以及所述函数关系构建妥协决策模型;采用自适应线性规划算法求解所述妥协决策模型,并进行多目标可视化权衡分析,得到满足所有所述性能指标的社会规则采用率范围;根据所述社会规则采用率范围,令所述群体机器人进行灾后救援。本发明能够在灾后救援中最大程度地避免人员伤亡和财产损失。
技术研发人员:明振军,罗雨雨,王国新,阎艳
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!