一种基于横纵双滑块扫描修正的曲线苗带导航线提取方法
:
1.本发明涉及农业工程领域,具体为智能农业中苗带对齐导航线提取方法。
背景技术:
:
2.1.随着智能农业装备的发展和应用,无人装备田间自主运行能力尤为重要,而对于行间处理类机器人,高效精准的苗带对齐导航能力具有重要意义。
3.2.田间苗带对齐导航问题以解决导航线提取性能为主要技术核心,更高效更精准的导航线获取将对智能行间装备的作业带来极大的改善。由于田间环境的复杂性,苗带往往具有不规则扭曲不平直,噪声干扰多,视觉导航困难的问题。目前,国内外对这一问题进行了很多研究和探讨,提出了许多解决方案。瑞典专家bjprn astrand等提出的基于hough变换的强鲁棒性作物行识别的导航算法,但只具备直线提取能力,这是最早的尝试,如今还出现了基于深度学习等先进技术的导航方法,但在处理速度和效率上还有一定的改进空间。结合国内外个团队的研究现状,本发明提出了一种基于横纵双滑块扫描修正的曲线苗带导航线提取方法,为智能农机提供高效可靠的苗带对齐导航。
技术实现要素:
:
4.1.本发明针对对行智能农业机器人导航速度较慢,精度较低的问题提出了基于横纵双滑块扫描修正的曲线苗带导航线提取方法。获取田间图像,并进行压缩,使用roi提取苗带范围,通过图像色彩分割提取算法提取绿色植株的苗带区域,通过横纵扫描修正优化特征点获取,对导航线坐标进行多项式拟合获得曲线导航线,同时实现roi的动态优化,提高处理精度,获取更优解。
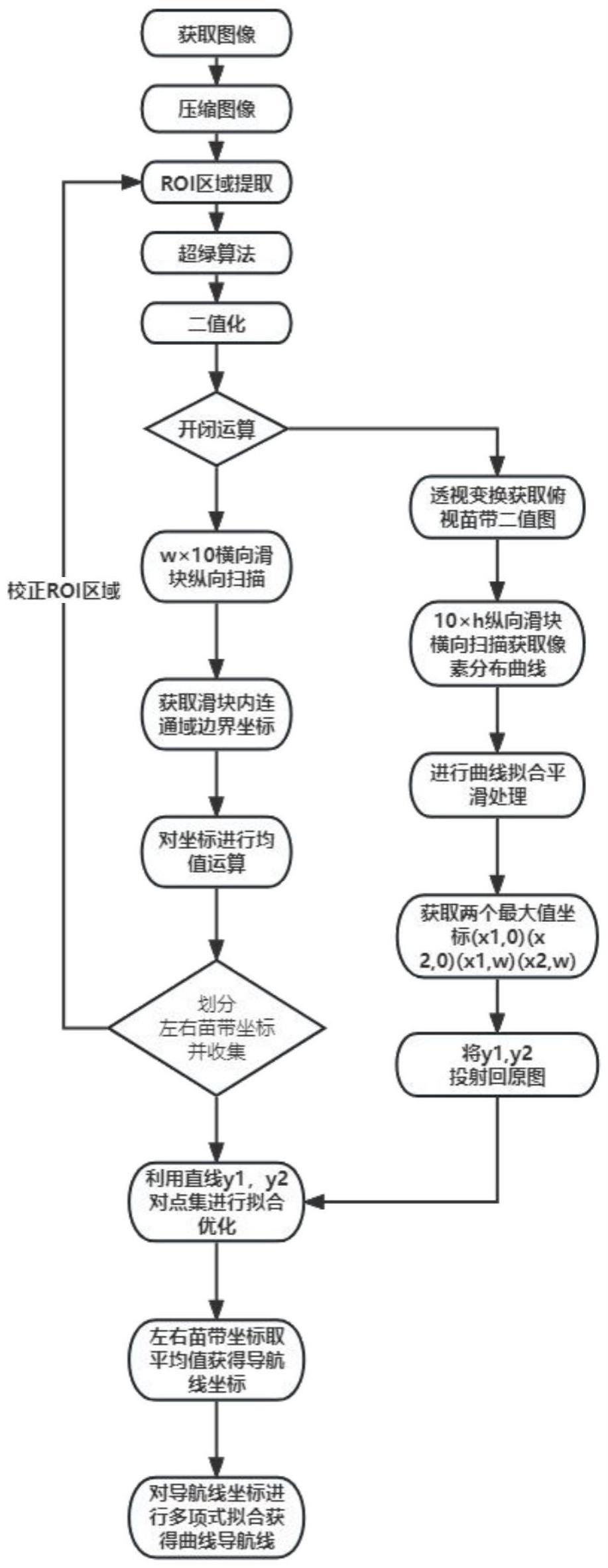
5.2.为解决上述技术问题,本发明采用如下技术方案:基于横纵双滑块扫描修正的曲线苗带导航线提取方法,它的步骤如下:s1:使用彩色摄像头获取田间图像,并进行压缩;s2:使用roi提取苗带范围;s3:通过图像色彩分割提取算法提取绿色植株的苗带区域并进行图像二值化和开闭运算等形态学处理;s4:利用横向滑块对图像进行纵向扫描,获取滑块内连通域边界坐标并进行均值运算,划分左右苗带特征点坐标并收集;s5:同时对步骤c图像进行透视变换获取俯视苗带二值图;s6:利用纵向滑块横向扫描图像获取像素分布曲线并进行曲线拟合平滑处理,获取最大值坐标得到两条苗带线端点坐标(x1,0)(x2,0)(x1,w)(x2,w);s7:将两条苗带线y1,y2投射回原图,利用直线y1,y2对点集进行修正优化,左右苗带坐标均值运算获得导航线坐标;s8:对导航线坐标进行多项式拟合获得曲线导航线;s9:整理s4获取的坐标信息返回修正s2中roi区域。s10:循环运行s1~s9步骤。
6.3.利用横向滑块对图像进行纵向扫描和利用纵向滑块横向扫描获取最大值坐标得到两条苗带线端点坐标,将两条苗带线y1,y2投射回原图,再利用直线y1,y2对点集进行修正优化,左右苗带坐标均值运算获得导航线坐标,获取特征但最优解,提高了导航线提取速度和拟合精度。
7.4.本发明与现有技术相比,有以下优点:体量较轻,处理速度快,能够满足智能机
械高速运行时的苗带对齐导航能力,同时可为智能农业机器提供更精确的曲线导航能力。
附图说明
8.图1是本发明的技术流程图;
9.图2是本发明的玉米田原图;
10.图3是本发明的经过图像处理优化后的苗带二值图;
11.图4是本发明的植株特征点和导航线结果图;
12.图5是本发明的纵向滑块横向扫描后获取左右两条苗带修正线的优化拟合曲线图;
具体实施方式:
13.下面结合附图,对本发明作详细的说明。
14.如图1所示,本发明提出了一种基于横纵双滑块扫描提取的曲线苗带导航算法。该算法包括(1)使用彩色摄像头获取田间图像,并进行压缩;(2)使用roi提取苗带范围;(3)通过图像色彩分割提取算法提取绿色植株的苗带区域并进行图像二值化和开闭运算等形态学处理;(4)利用横向滑块对图像进行纵向扫描,获取滑块内连通域边界坐标并进行均值运算,划分左右苗带特征点坐标并收集;
15.(5)同时对步骤c图像进行透视变换获取俯视苗带二值图;(6)利用纵向滑块横向扫描图像获取像素分布曲线并进行曲线拟合平滑处理,获取最大值坐标得到两条苗带线端点坐标(x1,0)(x2,0)(x1,w)(x2,w);(7)将两条苗带线y1,y2投射回原图,利用直线y1,y2对点集进行拟合优化,左右苗带坐标均值运算获得导航线坐标;(8)对导航线坐标进行多项式拟合获得曲线导航线;(9)整理s4获取的坐标信息返回修正s2中roi区域;(10)循环运行s1~s9步骤。
技术特征:
1.基于横纵双滑块扫描修正的曲线苗带导航线提取方法,其特征在于,它的步骤如下:s1:使用彩色摄像头获取田间图像,并进行压缩;s2:使用roi提取苗带范围;s3:通过图像色彩分割提取算法提取绿色植株的苗带区域并进行图像二值化和开闭运算等形态学处理;s4:利用横向滑块对图像进行纵向扫描,获取滑块内连通域边界坐标并进行均值运算,划分左右苗带特征点坐标并收集;s5:同时对步骤c图像进行透视变换获取俯视苗带二值图;s6:利用纵向滑块横向扫描图像获取像素分布曲线并进行曲线拟合平滑处理,获取最大值坐标得到两条苗带线端点坐标(x1,0)(x2,0)(x1,w)(x2,w);s7:将两条苗带线y1,y2投射回原图,利用直线y1,y2对点集进行拟合优化,左右苗带坐标均值运算获得导航线坐标;s8:对导航线坐标进行多项式拟合获得曲线导航线;s9:整理s4获取的坐标信息返回修正s2中roi区域。2.根据权利要求书1所述的基于横纵双滑块扫描修正的曲线苗带导航线提取方法,其特征在于,在s4中利用w
×
10横向滑块对图像进行纵向扫描。3.根据权利要求书1所述的基于横纵双滑块扫描修正的曲线苗带导航线提取方法,其特征在于,在s6中利用10
×
h纵向滑块对图像进行横向扫描。4.根据权利要求书1所述的基于横纵双滑块扫描修正的曲线苗带导航线提取方法,其特征在于,在s6中对像素分布曲线进行多项式拟合进行平滑处理,获得最大值更优解。5.根据权利要求书1所述的基于横纵双滑块扫描修正的曲线苗带导航线提取方法,其特征在于,在s7中利用线性苗带线对特征点进行修正优化,以拟合出更精确的非线性导航线。6.根据权利要求书1所述的基于横纵双滑块扫描修正的曲线苗带导航线提取方法,其特征在于,在s9中利用s4获取的前帧苗带数据返回s2中roi提取过程,以修正roi范围,提高roi区域的提取精度和适应性。
技术总结
本发明公开了一种基于横纵双滑块扫描修正的曲线苗带导航线提取方法,属于农业工程领域。通过摄像头获取田间苗带近端图像,并运用改进的图像处理方法分割苗带和土地,并减小杂草的噪声扰动,利用横向滑块纵向扫描捕获并划分左右苗带坐标特征点并收集,通过纵向滑块横向扫描对点集进行修正优化,左右苗带坐标均值运算获得导航线坐标,对导航线坐标进行多项式拟合获得曲线导航线,获取最优解,为实现复杂田间动态曲线导航提供了新方法。本发明利用非线性导航线获取与降抖处理,提高了田间近端导航的精度,同时改善了处理速度。本发明处理一幅图像的时间在20ms,可满足机械实时田间导航需求。需求。需求。
技术研发人员:权龙哲 时鉴泽 王子旭 时义辉 陈乾
受保护的技术使用者:安徽农业大学
技术研发日:2023.03.02
技术公布日:2023/8/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1