一种鱼眼可行驶区域评测方法及装置与流程
本发明涉及车辆可行驶区域评测,尤其涉及一种鱼眼可行驶区域评测方法及装置。
背景技术:
1、在泊车运行场景中,其可行驶区域和不可行驶区域的主要分界线是由不同类型障碍物地面边界构成。这里的障碍物不仅包含视觉检测中定义的障碍物类别,例如车辆;还包括一些场景中其他类型的障碍物,例如:路沿、台阶、道路栅栏、防护栏、消防栓等。为了泊车的安全进行需要对车辆的鱼眼可行驶区域识别性能进行检测。
2、目前,对车辆的鱼眼可行驶区域识别性能的评测方法是先人工对单张鱼眼图片进行可行驶区域标注,再基于深度学习的可行驶区域模型直接在鱼眼图片上输出可行驶区域检测结果,而后基于鱼眼图片的像素点进行可行驶区域iou评测。
3、但是,上述测评方法是基于单帧图片的可行驶区域2d像素点进行评测,不但未反映真实3d空间可行驶区域的评测结果,还由于单帧图片信息不全导致人工标注的真值信息也不全,进而导致评测精度也比较差,最终影响评测的准确度。
技术实现思路
1、鉴于上述问题,本发明提供一种鱼眼可行驶区域评测方法及装置,主要目的是为了实现提高鱼眼可行驶区域评测的准确度。
2、为解决上述技术问题,本发明提出以下方案:
3、第一方面,本发明提供一种鱼眼可行驶区域评测方法,所述方法包括:
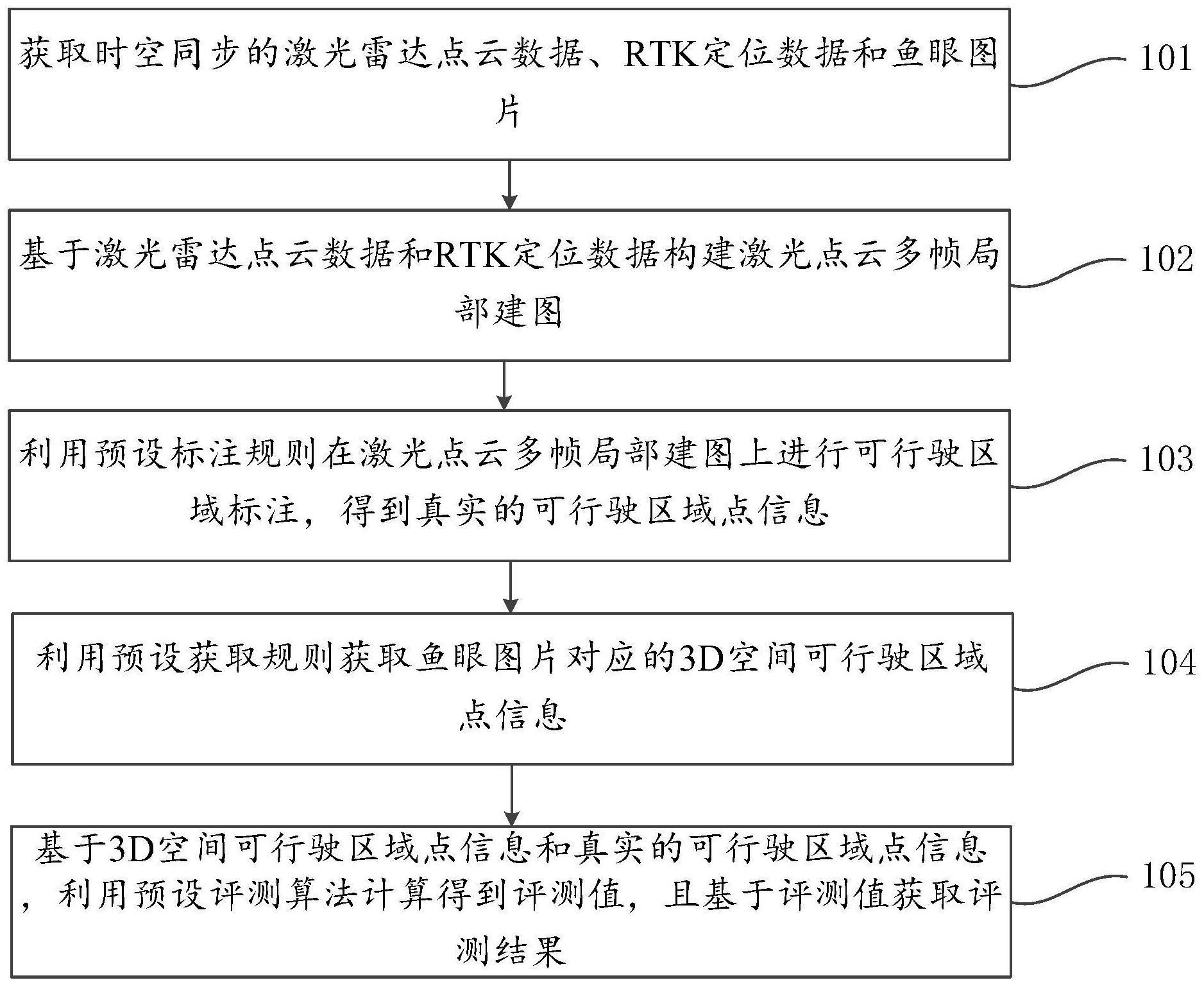
4、获取时空同步的激光雷达点云数据、rtk定位数据和鱼眼图片;
5、基于所述激光雷达点云数据和所述rtk定位数据构建激光点云多帧局部建图;
6、利用预设标注规则在所述激光点云多帧局部建图上进行可行驶区域标注,得到真实的可行驶区域点信息;
7、利用预设获取规则获取所述鱼眼图片对应的3d空间可行驶区域点信息;
8、基于所述3d空间可行驶区域点信息和所述真实的可行驶区域点信息,利用预设评测算法计算得到评测值,且基于所述评测值获取评测结果。
9、第二方面,本发明提供一种鱼眼可行驶区域评测装置,所述装置包括:
10、第一获取单元,用于获取时空同步的激光雷达点云数据、rtk定位数据和鱼眼图片;
11、构建单元,用于基于所述激光雷达点云数据和所述rtk定位数据构建激光点云多帧局部建图;
12、标注单元,用于利用预设标注规则在所述激光点云多帧局部建图上进行可行驶区域标注,得到真实的可行驶区域点信息;
13、第二获取单元,用于利用预设获取规则获取所述鱼眼图片对应的3d空间可行驶区域点信息;
14、计算单元,用于基于所述3d空间可行驶区域点信息和所述真实的可行驶区域点信息,利用预设评测算法计算得到评测值,且基于所述评测值获取评测结果。
15、为了实现上述目的,根据本发明的第三方面,提供了一种存储介质,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行上述第一方面所述鱼眼可行驶区域评测方法。
16、为了实现上述目的,根据本发明的第四方面,提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现如第二方面所述用于鱼眼可行驶区域评测装置的全部或部分步骤。
17、借由上述技术方案,本发明提供的鱼眼可行驶区域评测方法及装置,是由于目前采用对车辆的鱼眼可行驶区域识别性能的评测方法是基于单帧图片的可行驶区域2d像素点进行评测,不但未反映真实3d空间可行驶区域的评测结果,还由于单帧图片信息不全导致人工标注的真值信息也不全,进而导致评测精度也比较差,最终影响评测的准确度。为此,本发明通过获取时空同步的激光雷达点云数据、rtk定位数据和鱼眼图片;基于所述激光雷达点云数据和所述rtk定位数据构建激光点云多帧局部建图;利用预设标注规则在所述激光点云多帧局部建图上进行可行驶区域标注,得到真实的可行驶区域点信息;利用预设获取规则获取所述鱼眼图片对应的3d空间可行驶区域点信息;基于所述3d空间可行驶区域点信息和所述真实的可行驶区域点信息,利用预设评测算法计算得到评测值,且基于所述评测值获取评测结果。本发明不但在激光雷达产生的点云上进行可行驶区域标注比单帧点云信息更全,标注更精确;而且通过基于鱼眼图片对应的相机内外参将鱼眼图片的像素点转为基于车体坐标系3d空间的可行驶区域点可以反映真实3d空间可行驶区域的评测结果,进而提高评测的准确度。
18、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种鱼眼可行驶区域评测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述利用预设获取规则获取所述鱼眼图片对应的3d空间可行驶区域点信息,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述激光雷达点云数据和所述rtk定位数据构建激光点云多帧局部建图,包括:
4.根据权利要求3所述的方法,其特征在于,所述利用预设融合规则将所述激光雷达点云数据和所述rtk定位数据进行融合得到新点云位姿,包括:
5.根据权利要求1-4中任一项所述的方法,其特征在于,在所述获取时空同步的激光雷达点云数据、rtk定位数据和鱼眼图片之前,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述利用预设标注规则在所述激光点云多帧局部建图上进行可行驶区域标注,得到真实的可行驶区域点信息,包括:
7.根据权利要求6所述的方法,其特征在于,预设评测算法包括iou算法和acc算法;
8.一种鱼眼可行驶区域评测装置,其特征在于,包括:
9.一种存储介质,所述存储介质包括存储的程序,其特征在于,在所述程序运行时控制所述存储介质所在设备执行权利要求1至权利要求7中任一项所述鱼眼可行驶区域评测方法。
10.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至权利要求7中任一项所述鱼眼可行驶区域评测方法。
技术总结
本发明公开了一种鱼眼可行驶区域评测方法及装置,涉及区域评测领域,主要目的在于实现提高鱼眼可行驶区域评测的准确度。本发明主要的技术方案为:获取时空同步的激光雷达点云数据、RTK定位数据和鱼眼图片;基于所述激光雷达点云数据和所述RTK定位数据构建激光点云多帧局部建图;利用预设标注规则在所述激光点云多帧局部建图上进行可行驶区域标注,得到真实的可行驶区域点信息;利用预设获取规则获取所述鱼眼图片对应的3D空间可行驶区域点信息;基于所述3D空间可行驶区域点信息和所述真实的可行驶区域点信息,利用预设评测算法计算得到评测值,且基于所述评测值获取评测结果。本发明用于鱼眼可行驶区域评测。
技术研发人员:刘洋,赵天坤,彭伟,唐佳,汤雷
受保护的技术使用者:合众新能源汽车股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!