一种基于正反切函数的轴角转换实现方法及实现电路与流程
本发明涉及轴角转换,尤其涉及一种基于正反切函数的轴角转换实现方法及实现电路。
背景技术:
1、传统轴角转换器主要采用ⅱ型伺服系统方案,该种方案本质上是一种随动系统,对不同角度步进量有不同的运算时间,导致系统使用时一般需要按照最大调整时间进行重访问,这就制约了轴角转换器跟踪速率的提高;面对速度突变的应用场景,ⅱ型伺服系统调整时间长、数据处理平滑,导致无法真实反映速度的实际突变,且由于器件的分散性,实际使用中有时会出现系统无法稳定的情况。
2、采用直接角度比较方法,其电路环节比ⅱ型伺服系统方案更多,但每个环节的电路拓扑几乎一样,这就方便了大规模集成电路的设计与实施。直接角度比较方案克服了ⅱ型伺服系统动态响应的相关弱点,对任意角度的处理时长保持一致,且能够线性反馈速度的突变。
3、传统轴角转换器使用二进制角度值并行传输方法,高一位的角度加权值是第一位的2倍,最高位加权值为180°。现有使用直接角度比较方法进行轴角信号转换时,每一级电路都需要针对tan45°/2i-1搭建薄膜电阻网络,虽然能够直接进行二进制角度值的运算,但对薄膜电阻比例值的要求较高,导致产品研制成本高,且超高精密阻值也阻碍了集成电路小型化的发展。
技术实现思路
1、基于背景技术存在的技术问题,本发明提出了一种基于正反切函数的轴角转换实现方法及实现电路,对薄膜电阻比例值的要求不高,促进了集成电路小型化的发展,最终直接输出一串数字量,只需要按照需求将数字量解读,采用简单的加减法即可得到相应的角度。
2、本发明提出的一种基于正反切函数的轴角转换实现方法,包括:
3、获取正余弦反馈信号sinθ和cosθ,将所述正余弦反馈信号所在象限相移到第一象限sinθ0和cosθ0;
4、取处于第一象限的角度根据正反切函数确定传递函数的一般加权位后得到[sinθn,cosθn],输出解码后的角度值θ。
5、进一步地,在所述获取正余弦反馈信号sinθ和cosθ,将所述正余弦反馈信号所在象限相移到第一象限sinθ0和cosθ0中,具体包括:
6、使用零位比较器对sinθ和cosθ进行正负判断,取sinθ对应判定位为a0,cosθ对应判定位为a1,设定判定值大于0,对应判定位为0,判定值小于0时,对应判定位为1,所述判定值为sinθ和cosθ;
7、当(a0,a1)=(0,0),则sinθ=sinθ0,cosθ=cosθ0;
8、当(a0,a1)=(0,1),则sinθ=cosθ0,cosθ=-sinθ0;
9、当(a0,a1)=(1,1),则sinθ=-sinθ0,cosθ=-cosθ0;
10、当(a0,a1)=(1,0),则sinθ=-cosθ0,cosθ=sinθ0。
11、进一步地,在取处于第一象限的角度根据正反切函数确定传递函数的一般加权位得到[sinθn,cosθn],输出解码后的角度值θ中,具体包括:
12、取处于第一象限的角度计算得到
13、取值设置为正反切函数其中n为解码器的位数,输出与n取值对应的特征位b0、b1、···bn-1;
14、根据a0、a1、b0、b1、···bn-1对角度值θ进行解码,输出解码后的角度值。
15、进一步地,在取值设置为正反切函数其中n为解码器的位数,输出与n取值对应的特征位b0、b1、···bn-1中,具体包括:
16、取值设置为正反切函数
17、当n=1时,由于sinθ0>0,取对应特征位b0=0,则
18、
19、
20、当n=2时,若sinθ1>0,取对应特征位b1=0,则
21、
22、当n=2时,若sinθ1<0,取对应特征位b1=1,则
23、
24、依次循环计算得到b0、b1、···bn-1,对应的传递函数为:
25、
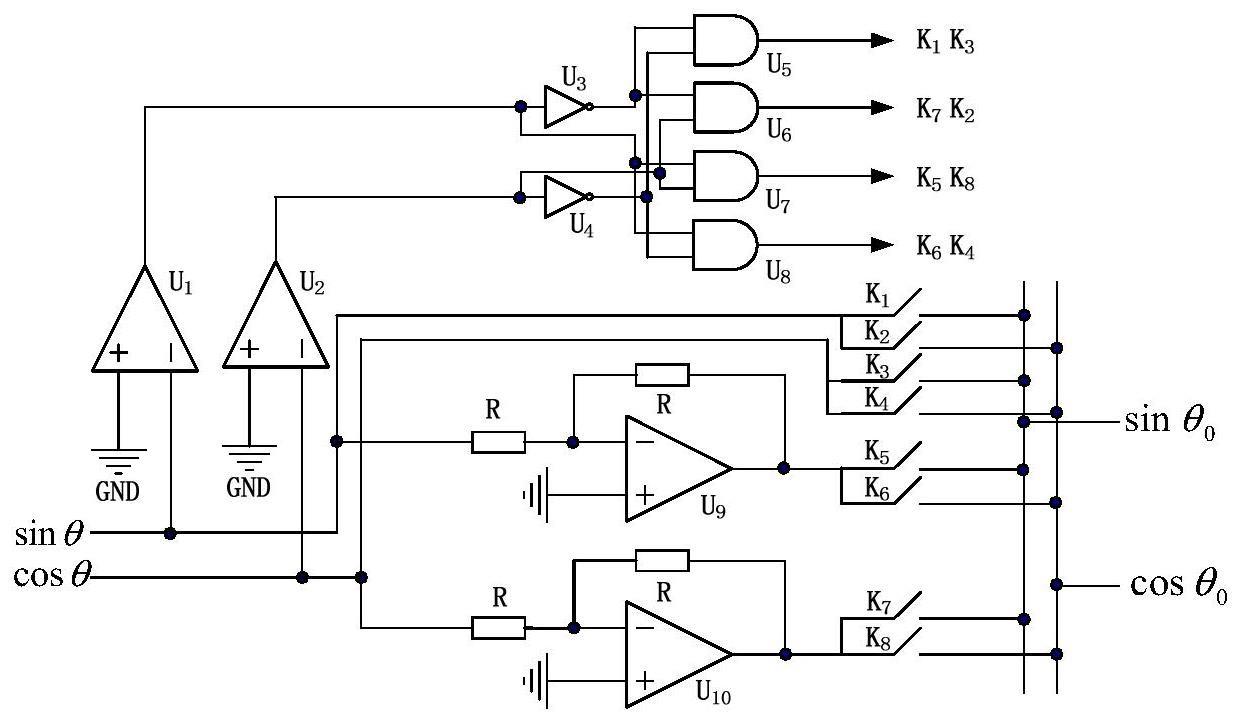
26、一种基于正反切函数的轴角转换实现电路,包括转相电路、第一级传递电路和第n级传递电路,转相电路的输入端输入正余弦反馈信号sinθ和cosθ、输出端与第一级传递电路的输入端连接,第n级传递电路的输入端与第一级传递电路的输出端连接、输出端输出信号sinθn和cosθn。
27、进一步地,所述转相电路包括直通电路和反向跟随器,直通电路和反向跟随器并联设置,直通电路的输入端分别输入信号sinθ、信号cosθ,输出端分别与输出信号sinθ0和信号cosθ0,反向跟随器的输入端分别输入信号sinθ、信号cosθ,输出端分别与输出信号sinθ0和信号cosθ0。
28、进一步地,所述第一级传递电路包括第一级加法器和第一级减法器,所述第n级传递电路包括第n级加法器和第n级减法器,第一级加法器和第一级减法器的输入端分别连接到转相电路的输出端,第一级加法器和第一级减法器的输出端分别连接到第n级加法器和第n级减法器的输入端。
29、进一步地,第n-1级传递电路在与第n级传递电路之间连接有第一传递模拟开关组,第n级传递电路在输出之前连接有第二传递模拟开关组。
30、本发明提供的一种基于正反切函数的轴角转换实现方法及实现电路的优点在于:本发明结构中提供的一种基于正反切函数的轴角转换实现方法及实现电路,对薄膜电阻比例值的要求不高,促进了集成电路小型化的发展;最终直接输出一串数字量,只需要按照需求将数字量解读,采用简单的加减法即可得到相应的角度,并且随着工艺能力的提高,可进行级数扩展,增加角度解读精度;同时将实现方法的算法过程中的系数全部忽略,实现极限思想的同时,将信号进行了放大,对信号的要求降低,即工艺需求降低;另外采用了直接反正切函数查表法,实现了电路结构的简化,用相同结构、相同参数的电路拼凑出轴角信号的求解方法,直接角度比较式方案对所有输入角度电压都是同样的处理流程,所以处理时间都一样,并且直接反正切函数查表法的主体电路结构、参数全部一致,更适合大规模集成电路设计的实现,运算速度可以随ic设计及工艺能力的提高而提高。
技术特征:
1.一种基于正反切函数的轴角转换实现方法,其特征在于,包括:
2.根据权利要求1所述的基于正反切函数的轴角转换实现方法,其特征在于,在所述获取正余弦反馈信号sinθ和cosθ,将所述正余弦反馈信号所在象限相移到第一象限sinθ0和cosθ0中,具体包括:
3.根据权利要求2所述的基于正反切函数的轴角转换实现方法,其特征在于,在取处于第一象限的角度根据正反切函数确定传递函数的一般加权位得到[sinθn,cosθn],输出解码后的角度值θ中,具体包括:
4.根据权利要求3所述的基于正反切函数的轴角转换实现方法,其特征在于,在取值设置为正反切函数其中n为解码器的位数,输出与n取值对应的特征位b0、b1、···bn-1中,具体包括:
5.一种基于正反切函数的轴角转换实现电路,其特征在于,包括转相电路、第一级传递电路和第n级传递电路,转相电路的输入端输入正余弦反馈信号sinθ和cosθ、输出端与第一级传递电路的输入端连接,第n级传递电路的输入端与第一级传递电路的输出端连接、输出端输出信号sinθn和cosθn。
6.根据权利要求5所述的基于正反切函数的轴角转换实现电路,其特征在于,所述转相电路包括直通电路和反向跟随器,直通电路和反向跟随器并联设置,直通电路的输入端分别输入信号sinθ、信号cosθ,输出端分别与输出信号sinθ0和信号cosθ0,反向跟随器的输入端分别输入信号sinθ、信号cosθ,输出端分别与输出信号sinθ0和信号cosθ0。
7.根据权利要求6所述的基于正反切函数的轴角转换实现电路,其特征在于,所述第一级传递电路包括第一级加法器和第一级减法器,所述第n级传递电路包括第n级加法器和第n级减法器,第一级加法器和第一级减法器的输入端分别连接到转相电路的输出端,第一级加法器和第一级减法器的输出端分别连接到第n级加法器和第n级减法器的输入端。
8.根据权利要求7所述的基于正反切函数的轴角转换实现电路,其特征在于,第n-1级传递电路在与第n级传递电路之间连接有第一传递模拟开关组,第n级传递电路在输出之前连接有第二传递模拟开关组。
技术总结
本发明公开了一种基于正反切函数的轴角转换实现方法及实现电路,获取正余弦反馈信号sinθ和cosθ,将所述正余弦反馈信号所在象限相移到第一象限sinθ<subgt;0</subgt;和cosθ<subgt;0</subgt;;取处于第一象限的角度根据正反切函数确定传递函数的一般加权位后得到[sinθ<subgt;n</subgt;,cosθ<subgt;n</subgt;],输出解码后的角度值θ;该轴角转换方法对薄膜电阻比例值的要求不高,促进了集成电路小型化的发展;最终直接输出一串数字量,只需要按照需求将数字量解读,采用简单的加减法即可得到相应的角度,并且随着工艺能力的提高,可进行级数扩展,增加角度解读精度。
技术研发人员:孙亚飞,胡睿,付炎松,刘嘉杰,朱虹
受保护的技术使用者:中国电子科技集团公司第四十三研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!