一种用于无人艇避障的水上目标检测方法及检测系统与流程
本发明属于目标检测,尤其涉及一种用于无人艇避障的水上目标检测方法。
背景技术:
1、在无人艇的自主航行中,水上目标的快速检测是无人艇自动避障的基础。下面介绍几个目前常用的目标检测方法:
2、(1)基于局部特征匹配的目标检测方法
3、基于局部特征匹配的目标检测通常将目标和待检测图像通过关键点以及关键点邻域内信息描述目标,或者通过局部区域内的特征信息描述目标。2004年,david lowe在ijcv上提出了著名的sift(scale-invariant featuretransform)局部特征描述子,可以有效适应尺度、旋转、仿射和视角等变化带来的影响。该算法通过图像金字塔和高斯核滤波的差分,检测出高斯拉普拉斯空间的极值点作为特征点,并通过局部128维特征进行描述,使其在应用时具有更好的适应性和鲁棒性。
4、(2)基于结构的目标检测方法
5、物体结构可以很好的反映出目标信息。通常物体都是由结构化特征构成,例如人通常由头、躯干和四肢构成,人脸通常由五官构成,车通常由车身和轮子构成。这种结构化信息可以将目标准确的从复杂场景中检测出来。
6、2010年,pedro felzenszwalb在pami上提出了dpm模型。dpm模型将目标分为几个不同的部件,在检测时根据不同部件的匹配程度以及部件之间的位置关系判断该物体是不是需要检测的目标。dpm是目前最好的目标检测算法之一,并连续几年获得voc上的检测冠军。
7、(3)基于深度学习的目标检测算法
8、深度学习的概念源于人工神经网络的研究。深度学习通过组合低层特征形成更加抽象的高层表示属性类别或特征,以发现数据的分布式特征表示。cnn也叫卷积神经网络,是目前使用最多的一种深度学习模型。
9、2014年ross girshick在cvpr上提出了r-cnn方法,将目标候选区域和cnn结合起来,用于目标检测。r-cnn将目标检测分为两个部分:寻找目标候选区域和目标识别。r-cnn将cnn结构的全连接层替换成svm分类器,并使用cnn结构的前半部分用于特征提取。r-cnn在目标检测邻域取得非常不错的效果,也成为目标检测邻域的一个重要分支。
10、尽管目前有许多目标检测的算法,但当前的算法都存在普适性较差的问题。大部分对尺寸较大的目标检测比较有效,而距离相较比较远的、或者本身尺寸较小的障碍物往往存在漏检问题。在无人艇的自主航行中,所面临的目标类型众多(例如渔船、浮标、漂浮物等等),并且目标的远近、视角、姿态变化非常大。复杂的场景下,目前的目标检测算法不能很好的适应真实的自然场景。
技术实现思路
1、本发明的目的在于:为了克服现有技术问题,公开了一种用于无人艇避障的水上目标检测方法,本发明水上目标检测方法通过结合经典算法对弱小目标的探测优势和ai深度学习算法对中型目标、大型目标的检测识别优势,实现无人化值守。
2、一方面,本发明目的通过下述技术方案来实现:
3、一种用于无人艇避障的水上目标检测方法,所述水上目标检测方法包括如下步骤:
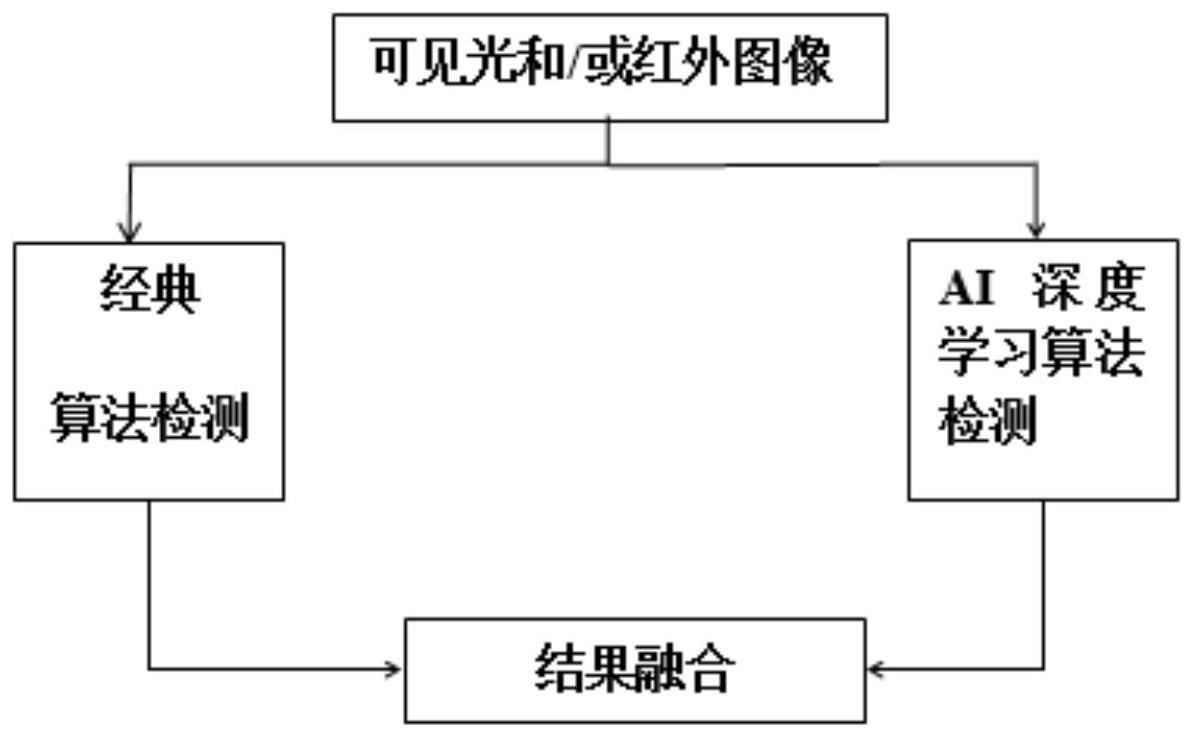
4、s1:将探测到的可见光图像和/或红外图像分别进行经典算法检测和ai深度学习算法检测;
5、s2:经典算法检测为在接收图像后,经过图像提取、滤波降噪、阈值选取、图像分割手段后,报出图像内弱小目标的位置信息、尺寸信息、亮度信息、可信度;
6、s3:ai深度学习算法检测为在接收图像后,经过图像提取、标记真值、模型训练、平台部署手段后,报出图像内各目标的位置信息、尺寸信息、亮度信息、可信度;
7、s4:将经典算法检测结果和ai深度学习算法检测结果进行融合,并按照可信度等级进行排列输出。
8、根据一个优选的实施方式,所述经典算法包括边缘检测算法、形态学滤波算法、特征提取算法、分水岭算法、otsu二值法、区域生长法、联通区域标记算法。
9、根据一个优选的实施方式,步骤s2中弱小目标是指分辨率小于32像素*32像素的目标。
10、根据一个优选的实施方式,步骤s2中图像提取过程利用海天线的位置信息划分弱小目标的分布范围,降低虚警;其中,海天线位置记为l,以海天线为基准,向上或向下弱小目标的存在概率pl逐渐降低。
11、根据一个优选的实施方式,步骤s2中滤波降噪为利用方向滤波的特点,对垂直方向的目标进行滤波加强,水平方向的海天线、水杂波会进行抑制。
12、根据一个优选的实施方式,步骤s2中阈值选取为:选取局部区域,滤波图像在局部区域的均值作为第一轮阈值t1;通过阈值t1计算局部区域内大于t1的像素个数n1,当n1大于100时,提高阈值至t2,t2=1.2*t1,通过阈值t2计算局部区域内大于t2的像素个数n2,当n2大于100时,提高阈值至t3,t3=1.2*t2,直至当nnum小于100时结束循环,此时tnum即为最终的阈值。
13、根据一个优选的实施方式,步骤s2中图像分割为:按照所选取的阈值将图像划分成若干感兴趣区域。
14、另一方面,本发明还公开了:
15、一种用于无人艇避障的水上目标检测系统,所述水上目标检测系统包括:经典算法检测模块、ai深度学习算法检测模块和结果融合模块,并基于权利要求1至6任一项所述的水上目标检测方法运行;所述经典算法检测模块用于对接收图像进行经典算法检测;所述ai深度学习算法检测模块用于对接收图像进行ai深度学习算法检测;所述结果融合模块用于将经典算法检测结果和ai深度学习算法检测结果进行融合,并按照可信度等级进行排列输出。
16、根据一个优选的实施方式,所述水上目标检测系统还包括图像采集模块,所述图像采集模块用于实现水上可见光图像和/或红外图像的探测采集,并将采集的图像数据分别发送至经典算法检测模块、ai深度学习算法检测模块。
17、前述本发明主方案及其各进一步选择方案可以自由组合以形成多个方案,均为本发明可采用并要求保护的方案。本领域技术人员在了解本发明方案后根据现有技术和公知常识可明了有多种组合,均为本发明所要保护的技术方案,在此不做穷举。
18、本发明的有益效果:本发明公开的用于无人艇避障的水上目标检测方法及检测系统是一种对水上目标检测新的检测思路;通过传统经典算法和ai深度学习算法的结合使用,充分发挥两者的优势,提高整个水上目标检测概率。
技术特征:
1.一种用于无人艇避障的水上目标检测方法,其特征在于,所述水上目标检测方法包括如下步骤:
2.如权利要求1所述的用于无人艇避障的水上目标检测方法,其特征在于,所述经典算法包括边缘检测算法、形态学滤波算法、特征提取算法、分水岭算法、otsu二值法、区域生长法、联通区域标记算法。
3.如权利要求1所述的用于无人艇避障的水上目标检测方法,其特征在于,步骤s2中弱小目标是指分辨率小于32像素*32像素的目标。
4.如权利要求3所述的用于无人艇避障的水上目标检测方法,其特征在于,步骤s2中图像提取过程利用海天线的位置信息划分弱小目标的分布范围,降低虚警;其中,海天线位置记为l,以海天线为基准,向上或向下弱小目标的存在概率pl逐渐降低。
5.如权利要求1所述的用于无人艇避障的水上目标检测方法,其特征在于,步骤s2中滤波降噪为利用方向滤波的特点,对垂直方向的目标进行滤波加强,水平方向的海天线、水杂波会进行抑制。
6.如权利要求1所述的用于无人艇避障的水上目标检测方法,其特征在于,步骤s2中阈值选取为:选取局部区域,滤波图像在局部区域的均值作为第一轮阈值t1;通过阈值t1计算局部区域内大于t1的像素个数n1,当n1大于100时,提高阈值至t2,t2=1.2*t1,通过阈值t2计算局部区域内大于t2的像素个数n2,当n2大于100时,提高阈值至t3,t3=1.2*t2,直至当nnum小于100时结束循环,此时tnum即为最终的阈值。
7.如权利要求1所述的用于无人艇避障的水上目标检测方法,其特征在于,步骤s2中图像分割为:按照所选取的阈值将图像划分成若干感兴趣区域。
8.一种用于无人艇避障的水上目标检测系统,其特征在于,所述水上目标检测系统包括:经典算法检测模块、ai深度学习算法检测模块和结果融合模块,并基于权利要求1至6任一项所述的水上目标检测方法运行;
9.如权利要求8所述的水上目标检测系统,其特征在于,所述水上目标检测系统还包括图像采集模块,所述图像采集模块用于实现水上可见光图像和/或红外图像的探测采集,并将采集的图像数据分别发送至经典算法检测模块、ai深度学习算法检测模块。
技术总结
本发明公开了一种用于无人艇避障的水上目标检测方法及检测系统,所述水上目标检测方法包括如下步骤:S1:将探测到的可见光图像和/或红外图像分别进行经典算法检测和AI深度学习算法检测;S2:经典算法检测为在接收图像后,经过图像提取、滤波降噪、阈值选取、图像分割手段后,报出图像内弱小目标的位置信息、尺寸信息、亮度信息、可信度;S3:AI深度学习算法检测为在接收图像后,经过图像提取、标记真值、模型训练、平台部署手段后,报出图像内各目标的位置信息、尺寸信息、亮度信息、可信度;S4:将经典算法检测结果和AI深度学习算法检测结果进行融合,并按照可信度等级进行排列输出。
技术研发人员:曹文喆,叶鹏,张华卫
受保护的技术使用者:四川九洲电器集团有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!