位姿确定方法、装置、电子设备和存储介质与流程
本公开涉及汽车,特别是涉及一种车辆相机的位姿确定方法、装置、电子设备和存储介质。
背景技术:
1、近年来,基于视觉的传感器在slam(simultaneous localization and mapping,同步定位及建图)算法中显示出显著的性能、精度和效率提升。其中,slam算法的一种方式是利用车辆或其它交通工具的单目鱼眼相机作为视觉传感器,这种方式可以使用其姿态估计模块重建大规模地图,并具有全局优化和回环检测功能。但是,利用单目鱼眼相机作为传感器进行建图及定位也存在一些问题,例如,建图时初始化阶段计算量较大、跟踪阶段精度较低。同时,由于系统鲁棒性较差,导致在定位过程中存在着定位精度及定位效率低下的问题。
技术实现思路
1、第一方面,本公开提供了一种地图构建方法、装置、电子设备和存储介质。
2、根据本公开的第一方面,提供了一种地图构建方法,该方法可以包括以下步骤:
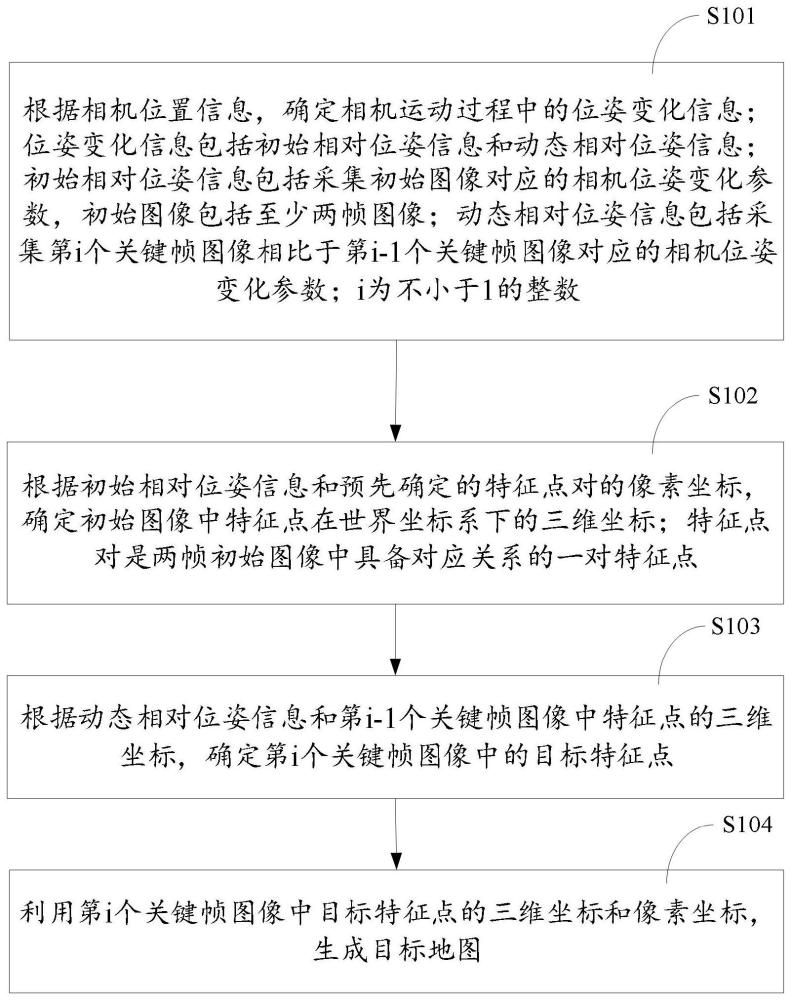
3、根据相机位置信息,确定相机运动过程中的位姿变化信息;位姿变化信息包括初始相对位姿信息和动态相对位姿信息;初始相对位姿信息包括采集初始图像对应的相机位姿变化参数,初始图像包括至少两帧图像;动态相对位姿信息包括采集第i个关键帧图像相比于第i-1个关键帧图像对应的相机位姿变化参数;i为不小于1的整数;
4、根据初始相对位姿信息和预先确定的特征点对的像素坐标,确定初始图像中的特征点在世界坐标系下的三维坐标;特征点对是两帧初始图像中具备对应关系的一对特征点;
5、根据动态相对位姿信息和第i-1个关键帧图像中特征点的三维坐标,确定第i个关键帧图像中的目标特征点;
6、利用第i个关键帧图像中目标特征点的三维坐标和像素坐标,生成目标地图。
7、根据本公开的第一方面,还提供了一种地图构建装置,包括:
8、位姿变化信息确定模块,用于根据相机位置信息,确定相机运动过程中的位姿变化信息;位姿变化信息包括初始相对位姿信息和动态相对位姿信息;初始相对位姿信息包括采集初始图像对应的相机位姿变化参数,初始图像包括至少两帧图像;动态相对位姿信息包括采集第i个关键帧图像相比于第i-1个关键帧图像对应的相机位姿变化参数;i为不小于1的整数;
9、初始化模块,用于根据初始相对位姿信息和预先确定的特征点对的像素坐标,确定初始图像中的特征点在世界坐标系下的三维坐标;特征点对是两帧初始图像中具备对应关系的一对特征点;
10、跟踪模块,用于根据动态相对位姿信息以及第i-1个关键帧图像中特征点的三维坐标,确定第i个关键帧图像中的目标特征点;
11、地图生成模块,用于利用第i个关键帧图像中目标特征点的三维坐标和对应的像素坐标,生成目标地图。
12、第二方面,本公开提供了一种位姿确定方法、装置、电子设备和存储介质。
13、根据本公开的第二方面,提供了一种位姿确定方法,该方法可以包括以下步骤:
14、根据当前视频帧的采集位置,在预先构建的地图中确定相似关键帧;
15、根据相似关键帧中特征点的相关信息,确定当前视频帧中的特征点像素坐标与特征点三维坐标之间的对应关系;相关信息包括特征点的像素坐标、三维坐标和描述子;
16、根据当前视频帧中的特征点像素坐标与特征点三维坐标之间的对应关系,确定当前位姿;当前位姿是采集当前视频帧对应的相机位姿。
17、根据本公开的第二方面,还提供了一种位姿确定装置,该装置包括:
18、相似关键帧确定模块,用于根据当前视频帧的采集位置,在预先构建的地图中确定相似关键帧;
19、对应确定模块,用于根据相似关键帧中特征点的相关信息,确定当前视频帧中的特征点像素坐标与特征点三维坐标之间的对应关系;相关信息包括特征点的像素坐标、三维坐标和描述子;
20、当前位姿确定模块,用于根据当前视频帧中的特征点像素坐标与特征点三维坐标之间的对应关系,确定当前位姿;当前位姿是采集当前视频帧对应的相机位姿。
21、根据本公开的另一方面,提供了一种电子设备,包括:
22、至少一个处理器;以及
23、与该至少一个处理器通信连接的存储器;其中,
24、该存储器存储有可被该至少一个处理器执行的指令,该指令被该至少一个处理器执行,以使该至少一个处理器能够执行本公开任一实施例中的方法。
25、根据本公开的另一方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,该计算机指令用于使计算机执行本公开任一实施例中的方法。
26、根据本公开的技术方案提供的位姿确定方法,能够有效提升位姿确定的精度及效率。
27、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种位姿确定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其中,所述根据当前视频帧的采集位置,在预先构建的地图中确定相似关键帧,包括:
3.根据权利要求1所述的方法,其中,所述根据当前视频帧的采集位置,在预先构建的地图中确定相似关键帧,包括:
4.根据权利要求2或3任一所述的方法,其中,在所述相似关键帧包括多个候选关键帧的情况下,所述根据所述相似关键帧中特征点的相关信息,确定所述当前视频帧中的特征点像素坐标与特征点三维坐标之间的对应关系,包括:
5.根据权利要求1所述的方法,其中,所述根据所述相似关键帧中特征点的相关信息,确定所述当前视频帧中的特征点像素坐标与特征点三维坐标之间的对应关系,包括:
6.根据权利要求5所述的方法,其中,所述根据所述相似关键帧中特征点的相关信息,在所述当前视频帧中进行特征点匹配,得到特征点对的像素坐标,包括:
7.一种电子设备,包括:
8.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据权利要求1-6中任一项所述的方法。
技术总结
本公开提供了一种位姿确定方法、装置、电子设备和存储介质,涉及汽车技术领域。具体实现方案为:根据当前视频帧的采集位置,在预先构建的地图中确定相似关键帧;根据相似关键帧中特征点的相关信息,确定当前视频帧中的特征点像素坐标与特征点三维坐标之间的对应关系;相关信息包括特征点的像素坐标、三维坐标和描述子;根据当前视频帧中的特征点像素坐标与特征点三维坐标之间的对应关系,确定当前位姿;当前位姿是采集当前视频帧对应的相机位姿。通过以上过程,能够提升位姿确定的效率和准确率。
技术研发人员:黄鹤
受保护的技术使用者:华人运通(上海)自动驾驶科技有限公司
技术研发日:
技术公布日:2024/9/26
- 还没有人留言评论。精彩留言会获得点赞!