通信方法、装置、存储介质及电子设备与流程
本公开涉及计算机,具体地,涉及一种通信方法、装置、存储介质及电子设备。
背景技术:
1、机器人操作系统(robot operating system,ros)是基于linux的亚操作系统,其源代码是开源的。机器人操作系统和机器人硬件之间具备较好的契合度,通常可以通过该系统下的ros应用或者ros2应用控制机器人。机器人操作系统的核心思想在于将机器人的软件功能做成一个个节点(nodes),节点之间通过互相发送信息进行通信。这些节点可以部署在同一台主机上,也可以部署在不同的主机上。ros应用强依赖于master中心节点进行通信,更接近工业化场景的ros2应用基于dds(data distribution service,数据分发服务)的分布式架构进行通信,ros2应用的各个节点可以在互相解耦的基础上直接通信。
2、然而,由于机器人操作系统官方支持的语言绑定有限,因此无论是ros应用还是ros2应用,针对使用非机器人操作系统官方支持的编程语言进行开发的应用程序,通常需要设置中间层(adapter)做接口适配,以此实现电子设备安装的应用和机器人操作系统应用之间的通信,这导致通信效率低。
技术实现思路
1、本公开的目的是提供一种通信方法、装置、存储介质及电子设备,以提高电子设备安装的应用和机器人操作系统应用之间的通信效率。
2、为了实现上述目的,本公开实施例的第一方面提供一种通信方法,应用于电子设备,所述电子设备安装有第一应用程序,所述第一应用程序集成有软件开发工具包,所述软件开发工具包封装有机器人操作系统的库文件,该库文件用于提供创建机器人通信节点的创建接口,所述方法包括:
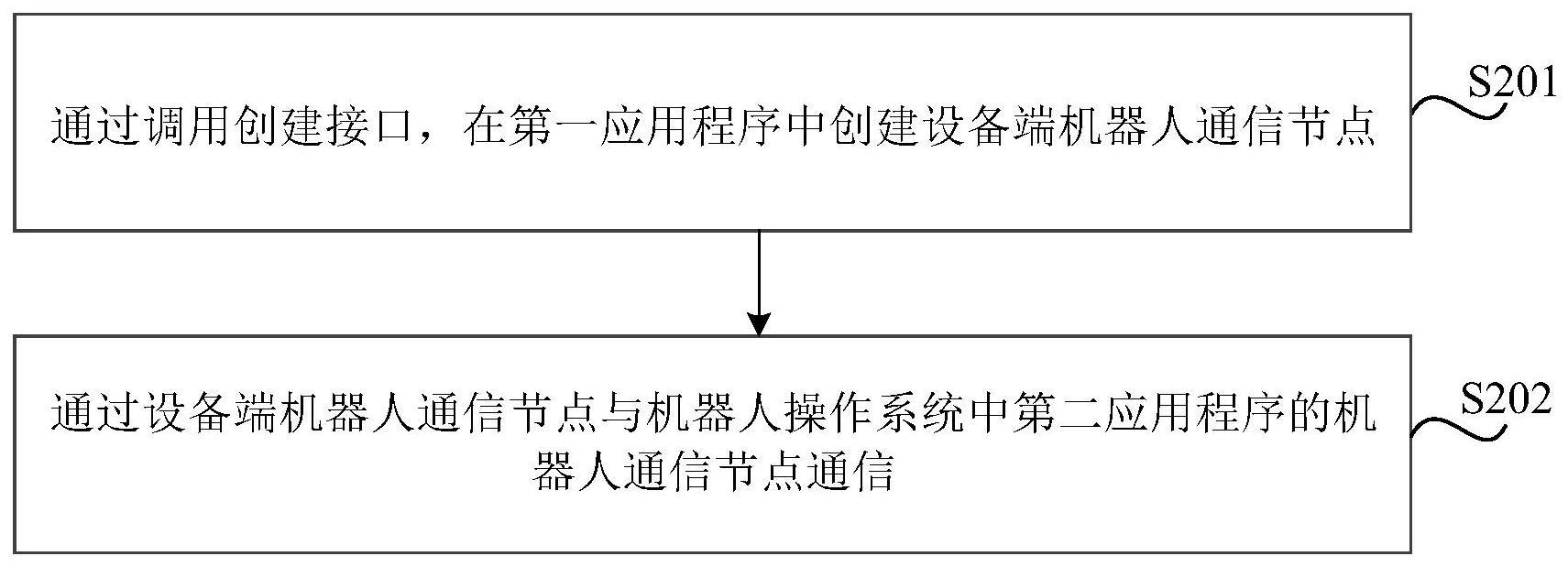
3、通过调用所述创建接口,在所述第一应用程序中创建设备端机器人通信节点;
4、通过所述设备端机器人通信节点与所述机器人操作系统中第二应用程序的机器人通信节点通信。
5、可选地,所述机器人操作系统的库文件是通过对运行在java虚拟机上的机器人操作系统的源码进行编译得到的。
6、可选地,所述第一应用程序的构建脚本中包括所述机器人操作系统提供的用于将所述库文件构建到所述第一应用程序的插件。
7、可选地,所述第一应用程序的构建脚本中添加有构建工具的依赖,所述构建工具用于将所述库文件打包成可执行文件。
8、可选地,所述第一应用程序还配置有所述构建工具提供的自定义库。
9、可选地,所述第一应用程序为安卓应用,所述第二应用程序为机器人操作系统应用。
10、可选地,所述库文件还用于提供控制机器人操作的控制接口。
11、本公开实施例的第二方面提供一种通信装置,应用于电子设备,所述电子设备安装有第一应用程序,所述第一应用程序集成有软件开发工具包,所述软件开发工具包封装有机器人操作系统的库文件,该库文件用于提供创建机器人通信节点的创建接口,所述装置包括:
12、调用模块,用于通过调用所述创建接口,在所述第一应用程序中创建设备端机器人通信节点;
13、通信模块,用于通过所述设备端机器人通信节点与所述机器人操作系统中第二应用程序的机器人通信节点通信。
14、本公开实施例的第三方面提供一种电子设备,包括:
15、存储器,其上存储有计算机程序;
16、处理器,用于执行所述存储器中的所述计算机程序,以实现第一方面中任一项所述通信方法的步骤。
17、本公开实施例的第四方面提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现第一方面中任一项所述通信方法的步骤。
18、通过上述技术方案,将封装有机器人操作系统的库文件的软件开发工具包集成到第一应用程序中,由此可以通过库文件提供的创建机器人通信节点的创建接口在第一应用程序中创建设备端机器人通信节点,在此基础上,可以通过该设备端机器人通信节点与机器人操作系统中第二应用程序的机器人通信节点通信。在这个过程中,无需设置适配接口的中间层来实现第一应用程序和第二应用程序之间的通信,而是通过集成在第一应用程序中的软件开发工具包以机器人通信系统支持的节点通信方式直接进行通信,由此提高了通信效率。
19、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种通信方法,其特征在于,应用于电子设备,所述电子设备安装有第一应用程序,所述第一应用程序集成有软件开发工具包,所述软件开发工具包封装有机器人操作系统的库文件,该库文件用于提供创建机器人通信节点的创建接口,所述方法包括:
2.根据权利要求1所述的通信方法,其特征在于,所述机器人操作系统的库文件是通过对运行在java虚拟机上的机器人操作系统的源码进行编译得到的。
3.根据权利要求1所述的通信方法,其特征在于,所述第一应用程序的构建脚本中包括所述机器人操作系统提供的用于将所述库文件构建到所述第一应用程序的插件。
4.根据权利要求1所述的通信方法,其特征在于,所述第一应用程序的构建脚本中添加有构建工具的依赖,所述构建工具用于将所述库文件打包成可执行文件。
5.根据权利要求4所述的通信方法,其特征在于,所述第一应用程序还配置有所述构建工具提供的自定义库。
6.根据权利要求1-5中任一项所述的通信方法,其特征在于,所述第一应用程序为安卓应用,所述第二应用程序为机器人操作系统应用。
7.根据权利要求1-5中任一项所述的通信方法,其特征在于,所述库文件还用于提供控制机器人操作的控制接口。
8.一种通信装置,其特征在于,应用于电子设备,所述电子设备安装有第一应用程序,所述第一应用程序集成有软件开发工具包,所述软件开发工具包封装有机器人操作系统的库文件,该库文件用于提供创建机器人通信节点的创建接口,所述装置包括:
9.一种非临时性计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-7中任一项所述方法的步骤。
10.一种电子设备,其特征在于,包括:
技术总结
本公开涉及一种通信方法、装置、存储介质及电子设备,该方法应用于电子设备,电子设备安装有第一应用程序,第一应用程序集成有软件开发工具包,软件开发工具包封装有机器人操作系统的库文件,该库文件用于提供创建机器人通信节点的创建接口,该方法包括:通过调用创建接口,在第一应用程序中创建设备端机器人通信节点;通过设备端机器人通信节点与机器人操作系统中第二应用程序的机器人通信节点通信。通过本公开提供的通信方法,无需设置适配接口的中间层来实现电子设备安装的应用和机器人操作系统应用之间的通信,提高了通信效率。
技术研发人员:陈钊清
受保护的技术使用者:达闼机器人股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!