一种基于数字图像智能识别的岩芯重定位方法
本发明属于岩土工程,尤其涉及一种基于数字图像智能识别的岩芯重定位方法。
背景技术:
1、深部开采随着深度的增加,地应力也会相应增加,此时会使围岩支护工作困难,也会让地质灾害更加难以防治。于是对地应力的测量更显重要,通过声发射法来测量地应力就是目前的一种主要方法。但是声发射法测量地应力大小和方向要求钻孔取样岩芯,并且岩芯原始方位必须确定,以指示取样方向。目前的钻孔取样岩芯技术并不能确定岩芯的原始方位。
2、为此,专利2020109809731公开了一种地应力方向确定方法,该方法将波速各向异性以及电成像测井资料相结合来评价地层中的地应力方向,避免电成像图像无法获取准确崩落缝方位以及古地磁法确定地应力方向存在较大误差的短板。但是上述专利在确定岩心姿态时,是利用岩心滚扫图像和井壁动静态图像的纹路特征进行比对,确定岩芯在钻井内的方位,不仅没有给出具体的图像匹配过程,而且目标深度的确定是通过记录取芯筒次数和每筒包含多少口岩芯样品后,在岩芯样品从地面取出后,由录井人员在岩芯样品上作出数字标记确定,这样的一个目标深度确定过程,不仅过程繁琐,而且只要稍微存在偏差,就会造成岩心滚扫图像和井壁动静态图像无法匹配,进而无法确定岩芯的相对方位。
技术实现思路
1、本发明的主要目的在于提供一种基于数字图像智能识别的岩芯重定位方法,旨在确定岩芯绝对位置,解决采样岩芯初始姿态难以确定的问题。
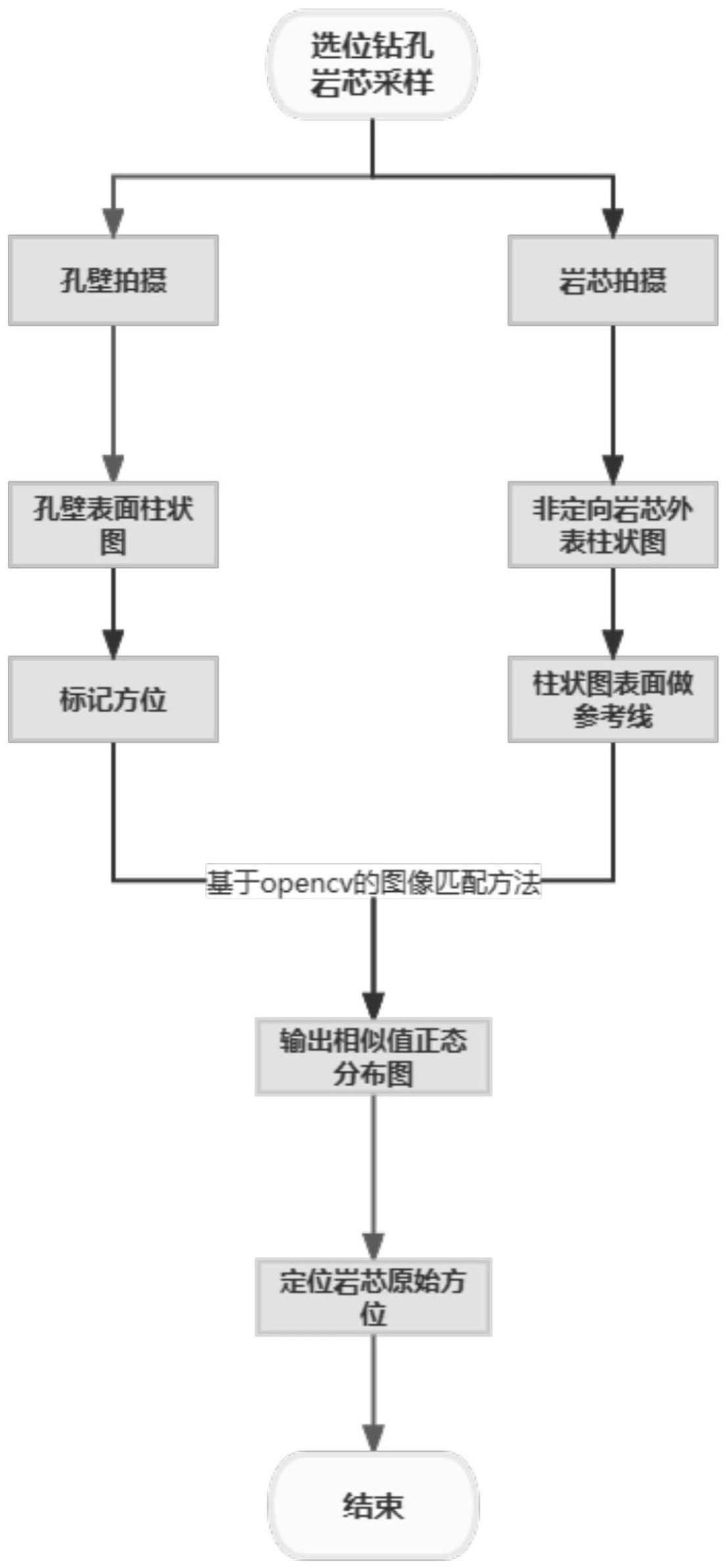
2、为此,本发明提供的基于数字图像智能识别的岩芯重定位方法,包括:
3、定位地表钻孔坐标,钻孔采集目标深度处的岩芯;
4、利用成像设备得到钻孔孔壁表面柱状图像,并在钻孔孔壁表面柱状图像上标记东-南-西-北各方位;
5、在岩芯表面绘制一条与岩心轴向平行的参考线,而后使用岩芯扫描装置扫描岩芯样品表面,生成岩芯外表柱状图像;
6、将钻孔孔壁表面柱状图像和岩芯外表柱状图像输入软件opencv中进行图像匹配,其中;
7、图像匹配时保证岩芯外表柱状图像上的参考线对上钻孔孔壁表面柱状图像的北方位,之后让岩芯外表柱状图像在钻孔孔壁表面柱状图像上间隔设定的像素点进行轴向和圆周方向图像遍历,获得不同深度处的相似值图;
8、在若干相似值图找到呈正态分布的相似值图,并获得该相似值图所对应的深度值h,在呈正态分布的相似值图中找到相似值最大处所对应的方位角θ;
9、根据获得的深度值h、方位角θ以及岩芯表面的参考线,实现未定向岩芯地表重定位。
10、具体的,选定钻孔点位,并通过gps定位找到该钻孔点位坐标,钻孔采集深度在h1-h2处的岩芯。
11、具体的,图像匹配时,先将钻孔孔壁表面柱状图像锁定在h1-h2深度范围内,而后输入岩芯外表柱状图像,让岩芯外表柱状图像从孔孔壁表面柱状图像的h1处开始分别在轴向方向向下滑动、圆周方向逆时针旋转进行图像遍历。
12、具体的,gps定位坐标采用wgs-84坐标系来描述地表钻孔点位。
13、具体的,岩芯外表柱状图像要保证图像上下没有颠倒,在使用扫描装置之前需要对岩芯表面灰尘进行清理。
14、具体的,岩芯采样完成后,成像设备从钻孔口开始拍摄,按照设定好的速度匀速下放,直至孔底停止拍摄图像,存储拍摄过程的影像,得到钻孔孔壁表面柱状图像。
15、具体的,所述成像设备采用钻孔电视。
16、具体的,所述钻孔电视包括成像探头、地表控制终端和绞车,所述绞车通过支撑架安装在地面上,所述绞车的提升绳深入钻孔内并与所述成像探头连接,所述探头通过信号线与地表控制终端连接。
17、具体的,所述岩芯扫描装置包括旋转底座台、驱动旋转底座台转动的驱动电机以及高清摄像头,所述岩芯竖直固定安装在所述旋转底座台上,所述旋转底座台上还设有带动所述高清摄像头沿着所述岩芯的轴向移动以对转动的岩芯进行摄像的驱动机构,所述高清摄像头则与所述地表控制终端连接。
18、具体的,所述旋转底座台还设有将所述岩芯的顶部压紧的压杆。
19、与现有技术相比,本发明至少一个实施例具有如下有益效果:
20、1、本申请基于opencv的图像模板匹配方法,将岩芯外表柱状图像在钻孔孔壁表面柱状图像上间隔设定的像素点进行轴向和圆周方向图像遍历,获得不同深度处的相似值图,操作人员只需要在所有获得的相似值图中找出呈正态分布的图来,在该图中读出深度h和方位角θ,便可基于深度h和方位角θ确定岩心在钻孔的方位,整个定位过程直观快捷,尽可能地减少了人为因素的不确定性,避免由人工判断所导致的失误,具有高效和精准的优点。
21、2、利用数字图像识别技术来完成定位功能,考虑到了包括岩性色彩、表面裂纹形貌、杂质色彩及分布形貌等特征信息,考虑周全,信息完整,结果更可靠,有说服力,采用柱状图像进行匹配定位,其最终结果直接易懂,具有较强的空间表现力,方便操作人员理解和使用。
技术特征:
1.一种基于数字图像智能识别的岩芯重定位方法,其特征在于,包括:
2.根据权利要求1所述的岩芯重定位方法,其特征在于:选定钻孔点位,并通过gps定位找到该钻孔点位坐标,钻孔采集深度在h1-h2处的岩芯。
3.根据权利要求2所述的岩芯重定位方法,其特征在于:图像匹配时,先将钻孔孔壁表面柱状图像锁定在h1-h2深度范围内,而后输入岩芯外表柱状图像,让岩芯外表柱状图像从孔孔壁表面柱状图像的h1处开始分别在轴向方向向下滑动、圆周方向逆时针旋转进行图像遍历。
4.根据权利要求3所述的岩芯重定位方法,其特征在于:gps定位坐标采用wgs-84坐标系来描述地表钻孔点位。
5.根据权利要求1所述的岩芯重定位方法,其特征在于:岩芯外表柱状图像要保证图像上下没有颠倒,在扫描之前需要对岩芯表面灰尘进行清理。
6.根据权利要求1所述的岩芯重定位方法,其特征在于:岩芯采样完成后,成像设备从钻孔口开始拍摄,按照设定好的速度匀速下放,直至孔底停止拍摄图像,存储拍摄过程的影像,得到钻孔孔壁表面柱状图像。
7.根据权利要求1-6任一项项所述的岩芯重定位方法,其特征在于:所述成像设备采用钻孔电视。
8.根据权利要求7项所述的岩芯重定位方法,其特征在于:所述钻孔(12)电视包括成像探头(9)、地表控制终端(7)和绞车(14),所述绞车(14)通过支撑架(13)安装在地面上,所述绞车(14)的提升绳深入钻孔(12)内并与所述成像探头(9)连接,所述成像探头(9)通过信号线(8)与地表控制终端(7)连接。
9.根据权利要求8项所述的岩芯(5)重定位方法,其特征在于:所述岩芯扫描装置包括旋转底座台(3)、驱动旋转底座台(3)转动的驱动电机以及高清摄像头(1),所述岩芯(5)竖直固定安装在所述旋转底座台(3)上,所述旋转底座台(3)上还设有带动所述高清摄像头(1)沿着所述岩芯(5)的轴向移动以对转动的岩芯(5)进行摄像的驱动机构,所述高清摄像头(1)则与所述地表控制终端(7)连接。
10.根据权利要求9项所述的岩芯重定位方法,其特征在于:所述旋转底座台(3)还设有将所述岩芯(5)的顶部压紧的压杆(4)。
技术总结
本发明公开了一种基于数字图像智能识别的岩芯重定位方法,旨在解决采样岩芯初始姿态难以确定的问题。为此,本发明提供的岩芯重定位方法,包括定位地表钻孔坐标,钻孔采集目标深度处的岩芯、生成钻孔孔壁表面柱状图像、生成岩芯外表柱状图像、利用OpenCV进行图像匹配、根据相似值图表确定图像特征信息最相似时的深度值和方位角、实现未定向岩芯地表重定位。
技术研发人员:黄麟淇,魏云峰,王少锋,王钊伟,刘迎泽
受保护的技术使用者:中南大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!