一种室内移动机器人车道线循迹方法及系统
本申请涉及机器人视觉车道线循迹领域,具体涉及一种室内移动机器人车道线循迹方法及系统。
背景技术:
1、随着人工智能技术快速发展,室内移动机器人自动控制技术已成为各大机器人企业必争之地。同时因为人们对智能化商品接受程度增加,具有智能控制系统的室内移动机器人层出不穷。室内移动机器人具有巡线、避障、远程遥控等功能,在减少人工的同时提升工作效率,如:餐厅中送餐服务机器人、家庭中扫地机器人、物流中物流机器人等。因此室内移动机器人循迹方法研究是十分具有意义的。
2、目前经典的图像分割算法总体上分为介于传统图像分割方法和基于深度学习的图像分割方法。传统图像分割方法通过人们对图像分割目标特征选择,基于阈值、边缘、聚类或区域等方法进行图像分割,如:直方图双峰法、迭代阈值图像分割法和分水岭法等图像分割算法。基于深度学习的图像分割方法通过神经网络模型充分学习和理解图像语义信息进行图像语义分割,如fcn、unet等图像分割模型。
3、在基于图像分割的室内移动机器人循迹方案存在如下问题:一是基于传统图像分割方案,虽对移动机器人硬件要求较低且不需要很强算力和大量数据集,但算法对光线变化敏感且算法需调节参数量较多,可能存在移动机器人更换环境导致循迹失败现象。二是基于深度学习图像分割方案,虽对环境变化不敏感且选算法调节参数较少,但网络参数量越大,对计算机计算能力要求越强,而室内移动机器人算力越大,成本就越高。在计算能力有限的场景下,神经网络参数轻量化处理就很重要。本发明提出一种基于图像分割的室内移动机器人循迹方法,通过机器人摄像头采集rgb图像制作图像分割数据集,利用图像分割方案处理采集图像,再计算车道线中点坐标,最后利用pid控制算法实现室内移动机器人自动循迹控制。
技术实现思路
1、为解决上述背景中的技术问题,本申请通过机器人摄像头采集rgb图像制作图像分割数据集,利用改进的unet网络实现车道线分割,再计算车道线中点坐标,最后利用pid控制算法实现室内移动机器人自动循迹控制。
2、为实现上述目的,本申请提供了一种室内移动机器人车道线循迹方法,步骤包括:
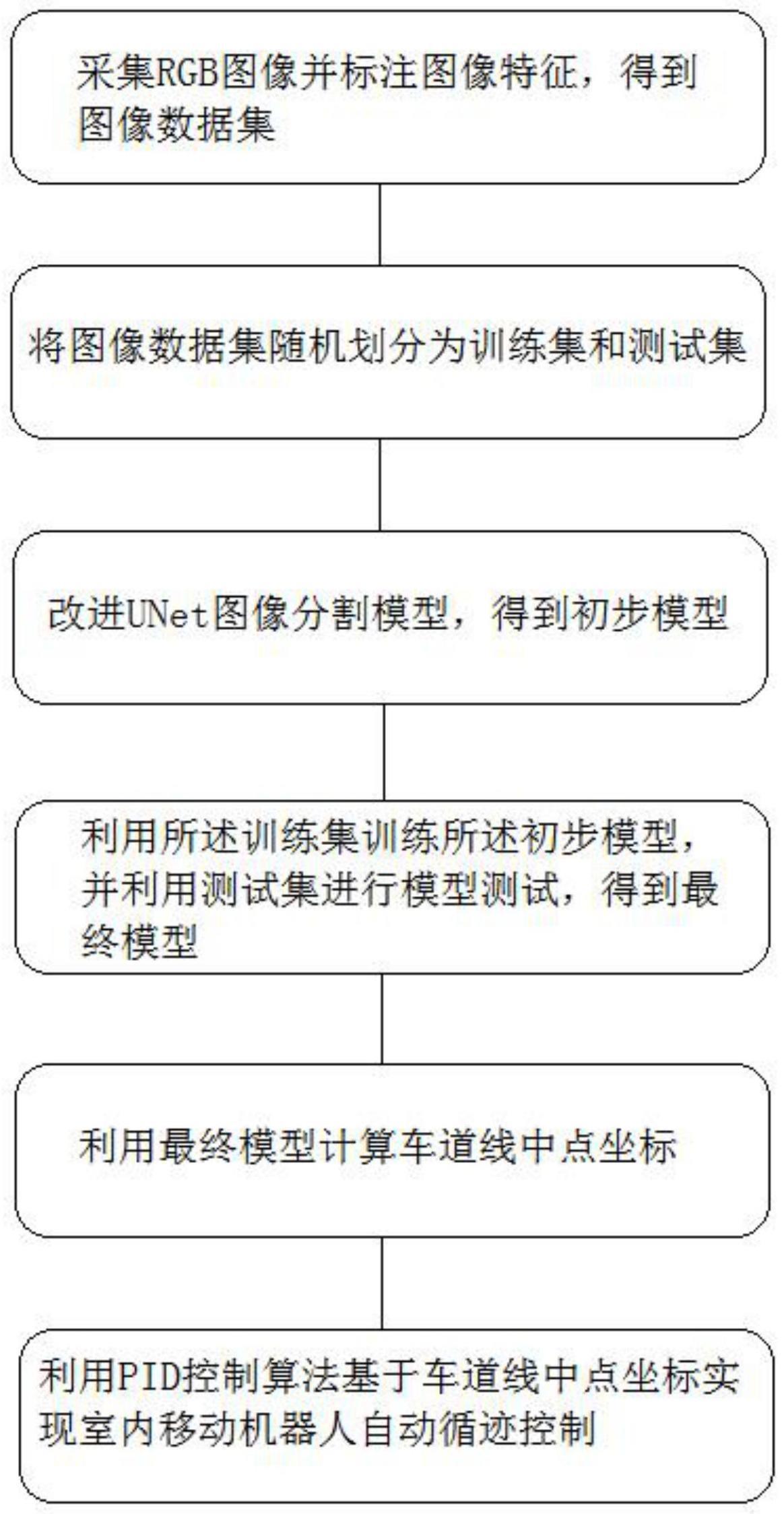
3、采集rgb图像并标注图像特征,得到图像数据集;
4、将所述图像数据集随机划分为训练集和测试集;
5、改进unet图像分割模型,得到初步模型;
6、利用所述训练集训练所述初步模型,并利用测试集进行模型测试,得到最终模型;
7、利用所述最终模型计算车道线中点坐标;
8、利用pid控制算法基于所述车道线中点坐标实现室内移动机器人自动循迹控制。
9、优选的,得到所述图像数据集的方法包括:
10、采集室内图像,并对所述室内图像中的标签数据进行分割,得到分割开的图像标签;
11、基于所述分割开的图像标签,得到图像格式的标注数据;所述标注数据即为所述图像数据集。
12、优选的,得到所述初步模型的方法包括:使用深度可分离卷积替换所述unet图像分割模型中原有的卷积,得到所述初步模型。
13、优选的,训练所述初步模型的方法包括:使用生成对抗网络对所述初步模型进行训练,采用梯度下降法进行迭代,并设置迭代次数和优化器的学习速率;同时,设置学习率与学习周期的关系,得到所述最终模型。
14、优选的,计算所述车道线中点坐标的方法包括:利用像素切片和滑动窗相结合的方法利用所述最终模型计算所述车道线中点坐标:
15、
16、式中,xi表示滑动窗口x轴坐标;λ表示可变参数;mean表示车道线自适应中点;i表示采集x轴坐标角标号;n表示车道线在一张图像中采集x轴坐标总个数。
17、优选的,控制室内移动机器人自动循迹的方法包括:采用增量式pid算法对机器人进行控制:
18、
19、式中,e表示车道线计算中点与图像中点偏差量;k表示当前时刻;u(k)表示当前时刻机器人输出舵角;kp表示比例增益;ki表示积分增益;kd表示微分增益;e(i)表示初始到当前时刻,误差累积量;e(k)表示当前时刻车道线中点与图像中点偏差量;e(k-1)表示前一时刻车道线中点与图像中点偏差量。
20、本申请还提供了一种室内移动机器人车道线循迹系统,包括:采集模块、划分模块、构建模块、训练模块、计算模块和控制模块;
21、所述采集模块用于采集rgb图像并标注图像特征,得到图像数据集;
22、所述划分模块用于将所述图像数据集随机划分为训练集和测试集;
23、所述构建模块用于改进unet图像分割模型,得到初步模型;
24、所述训练模块用于利用所述训练集训练所述初步模型,并利用测试集进行模型测试,得到最终模型;
25、所述计算模块用于利用所述最终模型计算车道线中点坐标;
26、所述控制模块用于利用pid控制算法基于所述车道线中点坐标实现室内移动机器人自动循迹控制。
27、优选的,所述采集模块包括:采集单元和标注单元;
28、所述采集单元用于采集室内图像,并对所述室内图像中的标签数据进行分割,得到分割开的图像标签;
29、所述标注单元用于基于所述分割开的图像标签,得到图像格式的标注数据;所述标注数据即为所述图像数据集。
30、与现有技术相比,本申请的有益效果如下:
31、本申请解决了室内移动循迹机器人嵌入传统图像分割算法,受光线等影响图像分割不稳定问题;同时还解决了室内移动循迹机器人嵌入深度学习图像分割算法,对硬件要求高不能满足实时控制问题。
技术特征:
1.一种室内移动机器人车道线循迹方法,其特征在于,步骤包括:
2.根据权利要求1所述的室内移动机器人车道线循迹方法,其特征在于,得到所述图像数据集的方法包括:
3.根据权利要求1所述的室内移动机器人车道线循迹方法,其特征在于,得到所述初步模型的方法包括:使用深度可分离卷积替换所述unet图像分割模型中原有的卷积,得到所述初步模型。
4.根据权利要求1所述的室内移动机器人车道线循迹方法,其特征在于,训练所述初步模型的方法包括:使用生成对抗网络对所述初步模型进行训练,采用梯度下降法进行迭代,并设置迭代次数和优化器的学习速率;同时,设置学习率与学习周期的关系,得到所述最终模型。
5.根据权利要求1所述的室内移动机器人车道线循迹方法,其特征在于,计算所述车道线中点坐标的方法包括:利用像素切片和滑动窗相结合的方法利用所述最终模型计算所述车道线中点坐标:
6.根据权利要求1所述的室内移动机器人车道线循迹方法,其特征在于,控制室内移动机器人自动循迹的方法包括:采用增量式pid算法对机器人进行控制:
7.一种室内移动机器人车道线循迹系统,其特征在于,包括:采集模块、划分模块、构建模块、训练模块、计算模块和控制模块;
8.根据权利要求7所述的室内移动机器人车道线循迹系统,其特征在于,所述采集模块包括:采集单元和标注单元;
技术总结
本申请公开了一种室内移动机器人车道线循迹方法及系统,其中方法步骤包括:采集RGB图像并标注图像特征,得到图像数据集;将图像数据集随机划分为训练集和测试集;改进UNet图像分割模型,得到初步模型;利用训练集训练初步模型,并利用测试集进行模型测试,得到最终模型;利用最终模型计算车道线中点坐标;利用PID控制算法基于车道线中点坐标实现室内移动机器人自动循迹控制。本申请解决了室内移动循迹机器人嵌入传统图像分割算法,受光线等影响图像分割不稳定问题;同时还解决了室内移动循迹机器人嵌入深度学习图像分割算法,对硬件要求高不能满足实时控制问题。
技术研发人员:周文涛,蔡成涛,曹择骏,朱文序,杨志勇
受保护的技术使用者:哈尔滨工程大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!