面向解剖复位的三维断骨配准与拼接的图像配准方法
本发明涉及医学图像配准,特别涉及面向解剖复位的三维断骨配准与拼接的配准方法。
背景技术:
1、随着医疗条件与技术的不断发展,人们对骨折手术提出了微创化、精准化、数字化等新的要求。为了解决以上问题,研究者们开发出计算机辅助手术导航系统应用于外科手术中。手术导航系统作为医学、计算机技术、影像学、自动化控制等诸多学科相结合的新型交叉研究领域,能够通过术前规划、术中导航、术后评估等方式,为医护人员提供辅助,从而减少骨折手术创伤,提升手术质量、同时减轻患者痛苦。
2、现有技术中,如何通过术中信息取得患者目标部位在空间中的精确位姿,是手术导航中的关键问题;现阶段解决该问题的方法主要有基于外部标记方法和基于图像配准方法;其中,基于外部标记的方法由于需要人为添加外部标记物辅助系统定位,存在着定位误差受软组织形变影响、对患者具有二次伤害等问题;而基于图像配准的方法在匹配2d和3d方面也有精确度不一定的问题。
技术实现思路
1、本发明要解决现有技术中的导航手术配准精度低,整个手术过程中对于患者的受伤部位可能进行长时间的手术,难以一次性快速的确定适宜的固定装置,难以适配最适合具体患者部位的固定机械的技术问题,提供面向解剖复位的三维断骨配准与拼接的配准方法。
2、为了解决上述技术问题,本发明的技术方案具体如下:
3、面向解剖复位的三维断骨配准与拼接的图像配准方法,包括:
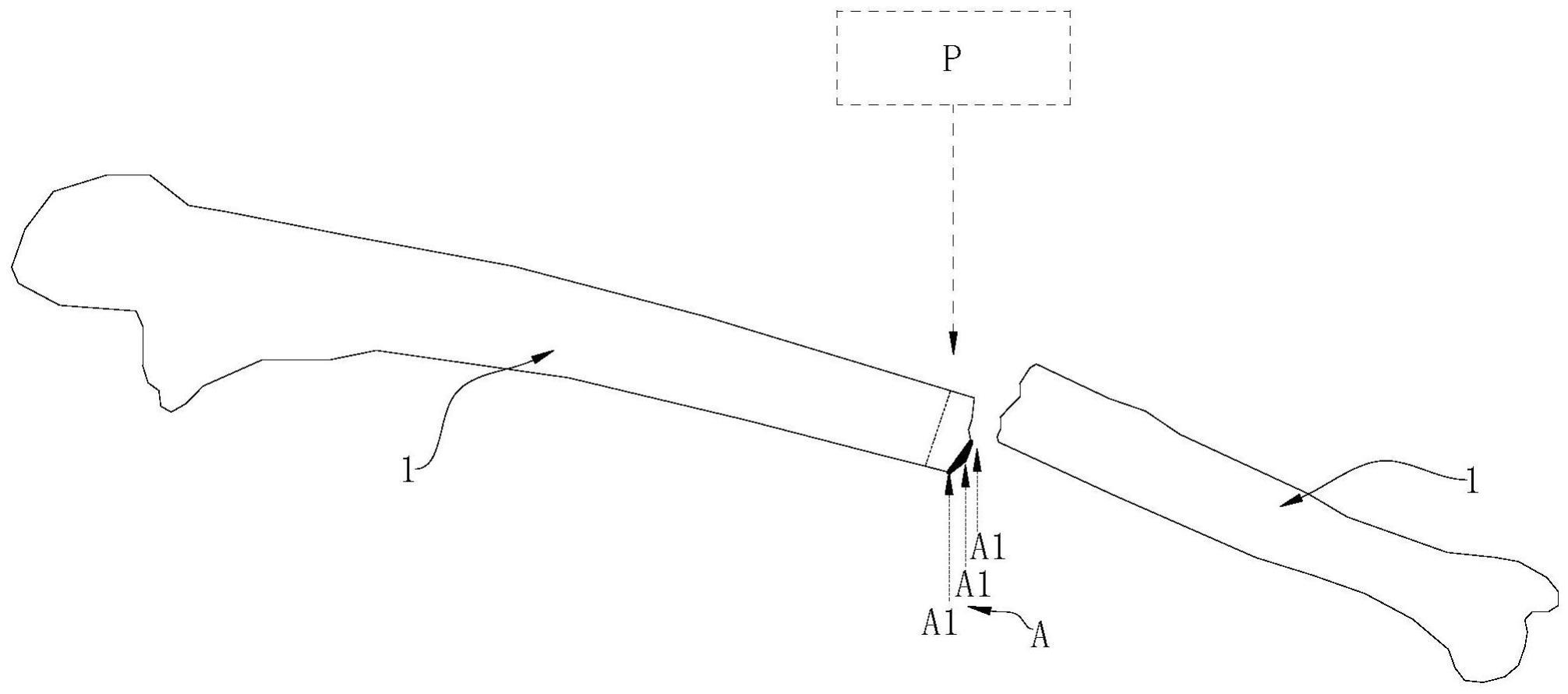
4、步骤一、获取目标1的ct图像序列;
5、基于ct扫描所述目标1得到目标断层图像p,并提取出所述目标1的单像素宽度的边界数据a1;
6、所述边界数据a1的集合为边界轮廓a;
7、所述边界轮廓a表现为所述边界数据a1的离散的像素点;
8、步骤二、边界轮廓的对应处理;
9、将所述目标的断层图像p识别出每一断层的内轮廓和外轮廓,并将各断层图像p上不同轮廓进行匹配组合,以获得能够对应目标1的实物体2;
10、步骤三、对点云文件的表面进行三维网格化;
11、将离散的像素点作为点云边界的点,并将多个点云边界的点连接成一个个三角形b,以使得所述三角形b可视作所述目标1的表面的一部分,以此将点云三角化来表示所述目标1的三维表面;
12、步骤四、通过法向量的方式刷选出目标1的端面;
13、对步骤三的矩阵进行中心化:其中
14、计算矩阵的协方差矩阵c:求出矩阵c的特征值和特征向量,其中最大的特征值对应的特征向量就是轴线向量,记作所述目标(1)的特征选取每个三角面片有相对应的法向量通过法向量和骨头轴线的夹角关系筛选出端面的三角面片集合;
15、步骤五、首先基于程序4pcs的计算方式进行粗配准,然后采用程序icp进行精确配准;
16、步骤六、获得目标1的配准参数;
17、所述配准参数包括:旋转矩阵、位移信息。
18、具体地,所述目标1的特征选取为长直骨。
19、具体地,通过法向量的方式刷选出目标1的端面的方式为采用mesh的计算处理的方式分割出所述端面。
20、具体地,在所述获取目标1的ct图像序列步骤中,所述ct扫描根据人体不同组织对x线的吸收与透过率的不同,应用灵敏度极高的仪器对人体进行测量;
21、然后将测量所获取的数据输入电子计算机,电子计算机对数据进行处理后,就可摄下人体被检查部位的断面图像信息组。
22、本发明具有以下的有益效果:
23、第一方面,本发明采用的粗配准加精确配准相结合的方法有效地降低了搜索空间的大小,从而大大降低迭代次数;
24、第二方面,本申请通过先全局后局部的优化策略提升了位姿参数的捕获范围以及配准精度,能够较快的为后续手术步骤提供提供必要的参数;
25、第三方面,经过仿真实验结果验证,该方法能够更加高效的在手术配准系统中获取精准刚性变换参数。
技术特征:
1.面向解剖复位的三维断骨配准与拼接的图像配准方法,其特征在于,包括:
2.如权利要求1所述的面向解剖复位的三维断骨配准与拼接的图像配准方法,其特征在于,所述目标(1)的特征选取为长直骨。
3.如权利要求2所述的面向解剖复位的三维断骨配准与拼接的图像配准方法,其特征在于,通过法向量的方式刷选出目标(1)的端面的方式为采用mesh的计算处理的方式分割出所述端面。
4.如权利要求1所述的面向解剖复位的三维断骨配准与拼接的图像配准方法,其特征在于,在所述获取目标(1)的ct图像序列步骤中,所述ct扫描根据人体不同组织对x线的吸收与透过率的不同,应用灵敏度极高的仪器对人体进行测量;
技术总结
本发明涉及医学图像配准技术领域,特别涉及面向解剖复位的三维断骨配准与拼接的配准方法,以解决现有技术中的导航手术配准精度低,整个手术过程中对于患者的受伤部位可能进行长时间的手术,难以一次性快速的确定适宜的固定装置,难以适配最适合具体患者部位的固定机械的技术问题。具体包括获取目标的CT图像序列、边界轮廓的对应处理、对点云文件的表面进行三维网格化、通过法向量的方式刷选出目标的端面、获得目标的配准参数。本申请通过先全局后局部的优化策略提升了位姿参数的捕获范围以及配准精度,能够较快的为后续手术步骤提供提供必要的参数;经过仿真实验结果验证,该方法能够更加高效的在手术配准系统中获取精准刚性变换参数。
技术研发人员:曲峰,师为礼,杨晨,赵耀,王翔,蒋振刚,苗语,何飞,殷雷,李永辉
受保护的技术使用者:长春理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!