三维建模软件中产品零件模型的自动装配方法、装置与流程
本发明涉及自动装配,具体涉及一种三维建模软件中产品零件模型的自动装配方法和一种三维建模软件中产品零件模型的自动装配装置。
背景技术:
1、在工业设计中,三维建模技术已成为产品前期设计阶段的重要步骤。
2、目前,三维建模软件在进行零件模型的装配时,均需手动添加零件装配关系,而一些复杂的产品常常由成百上千个零件模型组成,若所有零件默许宁的装配关系全部由设计人员手动添加,会造成人力资源的极大浪费以及额外的时间成本。
技术实现思路
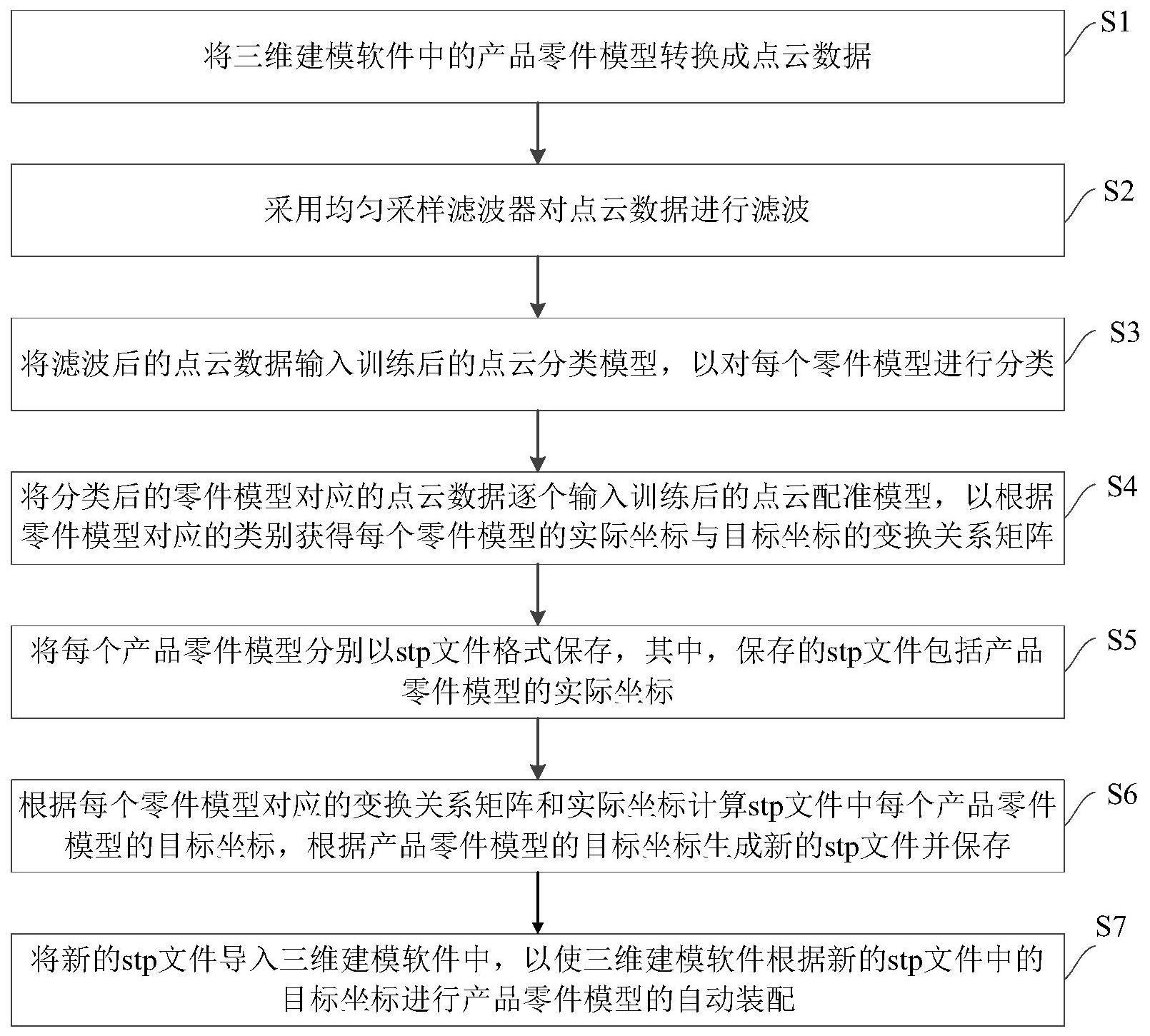
1、为解决上述技术问题,本发明的第一个目的在于提出一种三维建模软件中产品零件模型的自动装配方法,包括以下步骤:将所述三维建模软件中的产品零件模型转换成点云数据;采用均匀采样滤波器对所述点云数据进行滤波;将滤波后的点云数据输入训练后的点云分类模型,以对每个零件模型进行分类;将分类后的零件模型对应的点云数据逐个输入训练后的点云配准模型,以根据所述零件模型对应的类别获得每个零件模型的实际坐标与目标坐标的变换关系矩阵;将每个所述产品零件模型分别以stp文件格式保存,其中,保存的stp文件包括所述产品零件模型的实际坐标;根据每个所述零件模型对应的变换关系矩阵和实际坐标计算stp文件中每个产品零件模型的目标坐标,根据所述产品零件模型的目标坐标生成新的stp文件并保存;将所述新的stp文件导入所述三维建模软件中,以使所述三维建模软件根据所述新的stp文件中的目标坐标进行产品零件模型的自动装配。
2、本发明的第二个目的在于提出一种三维建模软件中产品零件模型的自动装配装置。
3、本发明采用的技术方案如下:
4、本发明第一方面的实施例提出了一种三维建模软件中产品零件模型的自动装配方法,包括以下步骤:将所述三维建模软件中的产品零件模型转换成点云数据;采用均匀采样滤波器对所述点云数据进行滤波;将滤波后的点云数据输入训练后的点云分类模型,以对每个零件模型进行分类;将分类后的零件模型对应的点云数据逐个输入训练后的点云配准模型,以根据所述零件模型对应的类别获得每个零件模型的实际坐标与目标坐标的变换关系矩阵;将每个所述产品零件模型分别以stp文件格式(基于ascii格式符合step应用协议iso 10303-21标准的正文编码的交换结构的三维图像数据)保存,其中,保存的stp文件包括所述产品零件模型的实际坐标;根据每个所述零件模型对应的变换关系矩阵和实际坐标计算stp文件中每个产品零件模型的目标坐标,根据所述产品零件模型的目标坐标生成新的stp文件并保存;将所述新的stp文件导入所述三维建模软件中,以使所述三维建模软件根据所述新的stp文件中的目标坐标进行产品零件模型的自动装配。
5、本发明上述提出的三维建模软件中产品零件模型的自动装配方法还可以具有如下附加技术特征:
6、根据本发明的一个实施例,所述点云分类模型采用以下方式训练:获取点云分类模型的训练集,所述点云分类模型的训练集包括:产品零件模型的点云数据和对应的标签;通过t-net网络将所述训练集中的点云数据在空间上对齐;通过多层感知机将所述点云数据映射至64维空间上对齐后,再将所述点云数据映射至1024维空间上;通过最大池化操作得到所述点云数据的全局特征;将所述点云数据的全局特征输入多层感知机进行分类,以使所述多层感知机根据所述分类结果和所述标签进行训练。
7、根据本发明的一个实施例,所述点云配准模型包括:benchmark网络(一种神经网络)。
8、根据本发明的一个实施例,所述三维建模软件为cad(computer aided design,计算机辅助设计)、catia、proe或solidworks。
9、本发明第二方面的实施例提出了一三维建模软件中产品零件模型的自动装配装置,包括:转换模块,所述转换模块用于将所述三维建模软件中的产品零件模型转换成点云数据;滤波模块,所述滤波模块用于采用均匀采样滤波器对所述点云数据进行滤波;分类模块,所述分类模块用于将滤波后的点云数据输入训练后的点云分类模型,以对每个零件模型进行分类;配准模块,所述配准模块用于将分类后的零件模型对应的点云数据逐个输入训练后的点云配准模型,以根据所述零件模型对应的类别获得每个零件模型的实际坐标与目标坐标的变换关系矩阵;第一存储模块,所述第一存储模块用于将每个所述产品零件模型分别以stp文件格式保存,其中,保存的stp文件包括所述产品零件模型的实际坐标;计算模块,所述计算模块用于根据每个所述零件模型对应的变换关系矩阵和实际坐标计算stp文件中每个产品零件模型的目标坐标,根据所述产品零件模型的目标坐标生成新的stp文件并保存;装配模块,所述装配模块用于将所述新的stp文件导入所述三维建模软件中,以使所述三维建模软件根据所述新的stp文件中的目标坐标进行产品零件模型的自动装配。
10、本发明上述提出的三维建模软件中产品零件模型的自动装配装置还可以具有如下附加技术特征:
11、根据本发明的一个实施例,所述点云分类模型采用以下方式训练:获取点云分类模型的训练集,所述点云分类模型的训练集包括:产品零件模型的点云数据和对应的标签;通过t-net网络将所述训练集中的点云数据在空间上对齐;通过多层感知机将所述点云数据映射至64维空间上对齐后,再将所述点云数据映射至1024维空间上;通过最大池化操作得到所述点云数据的全局特征;将所述点云数据的全局特征输入多层感知机进行分类,以使所述多层感知机根据所述分类结果和所述标签进行训练。
12、根据本发明的一个实施例,所述点云配准模块包括:benchmark网络。
13、根据本发明的一个实施例,所述三维建模软件为cad、catia、proe或solidworks。
14、本发明的有益效果:
15、本发明先通过点云分类模型给产品零件进行分类,再通过点云配准模型根据类别获得不同零件间的位置关系,可以使三维建模软件根据位置关系实现零件模型的自动装配,不仅可以有效降低模型的计算量并提高模型精度,且可以大大节约新产品的开发周期与人力成本,以及,零件模型文件统一保存成stp格式后再进行坐标转换,可实现不同建模软件间的零件自动装配,具有很高的通用性。
技术特征:
1.一种三维建模软件中产品零件模型的自动装配方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的三维建模软件中产品零件模型的自动装配方法,其特征在于,所述点云分类模型采用以下方式训练:
3.根据权利要求1所述的三维建模软件中产品零件模型的自动装配方法,其特征在于,所述点云配准模型包括:benchmark网络。
4.根据权利要求1-3中任一项所述的三维建模软件中产品零件模型的自动装配方法,其特征在于,所述三维建模软件为cad、catia、proe或solidworks。
5.一种三维建模软件中产品零件模型的自动装配装置,其特征在于,包括:
6.根据权利要求5所述的三维建模软件中产品零件模型的自动装配装置,其特征在于,所述点云分类模型采用以下方式训练:
7.根据权利要求5所述的三维建模软件中产品零件模型的自动装配装置,其特征在于,所述点云配准模型包括:benchmark网络。
8.根据权利要求5-7中任一项所述的三维建模软件中产品零件模型的自动装配装置,其特征在于,所述三维建模软件为cad、catia、proe或solidworks。
技术总结
本发明提供一种三维建模软件中产品零件模型的自动装配方法、装置,方法包括:将产品零件模型转换成点云数据后输入点云分类模型以进行分类;将分类后的点云数据逐个输入点云配准模型,以获得每个零件模型的实际坐标与目标坐标的变换关系矩阵;将每个产品零件模型分别以stp文件格式保存;根据变换关系矩阵计算每个产品零件模型的目标坐标,根据目标坐标生成新的stp文件并保存;将新的stp文件导入三维建模软件中,以使三维建模软件进行产品零件模型的自动装配。本发明先给产品零件分类,再根据类别获得不同零件间的位置关系,可以有效降低计算量并提高装配精度,且零件模型文件统一保存成stp格式,可实现不同建模软件间的零件自动装配。
技术研发人员:孙成成,潘正颐,侯大为,童竹勍
受保护的技术使用者:常州微亿智造科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!