定位方法、装置、设备及程序产品与流程
本申请涉及定位,尤其涉及一种定位方法、装置、设备及程序产品。
背景技术:
1、随着基于位置服务(lbs)的发展,基于lbs实现的服务场景越来越多。以导航场景为例,导航场景需要使用导航服务的被导航对象的实时定位位置,通常在室外可以依赖gnss信号获得被导航对象的实时定位位置,进而基于实时定位位置和导航规划路线,为被导航对象提供导航服务。
2、然而,在室内环境中,由于gnss信号被建筑遮挡,导致室内gnss信号弱或不可用,因此,在室内无法通过gnss信号对设备位置进行定位。而提供在室内能够对设备位置进行准确定位的技术方案,是本领域技术人员一直在解决的问题。
技术实现思路
1、本申请实施例的主要目的在于提供一种定位方法、装置、设备及程序产品,能够为用户提供室内精确的定位,提升用户体验。
2、第一方面,本申请实施例提供一种定位方法,包括:
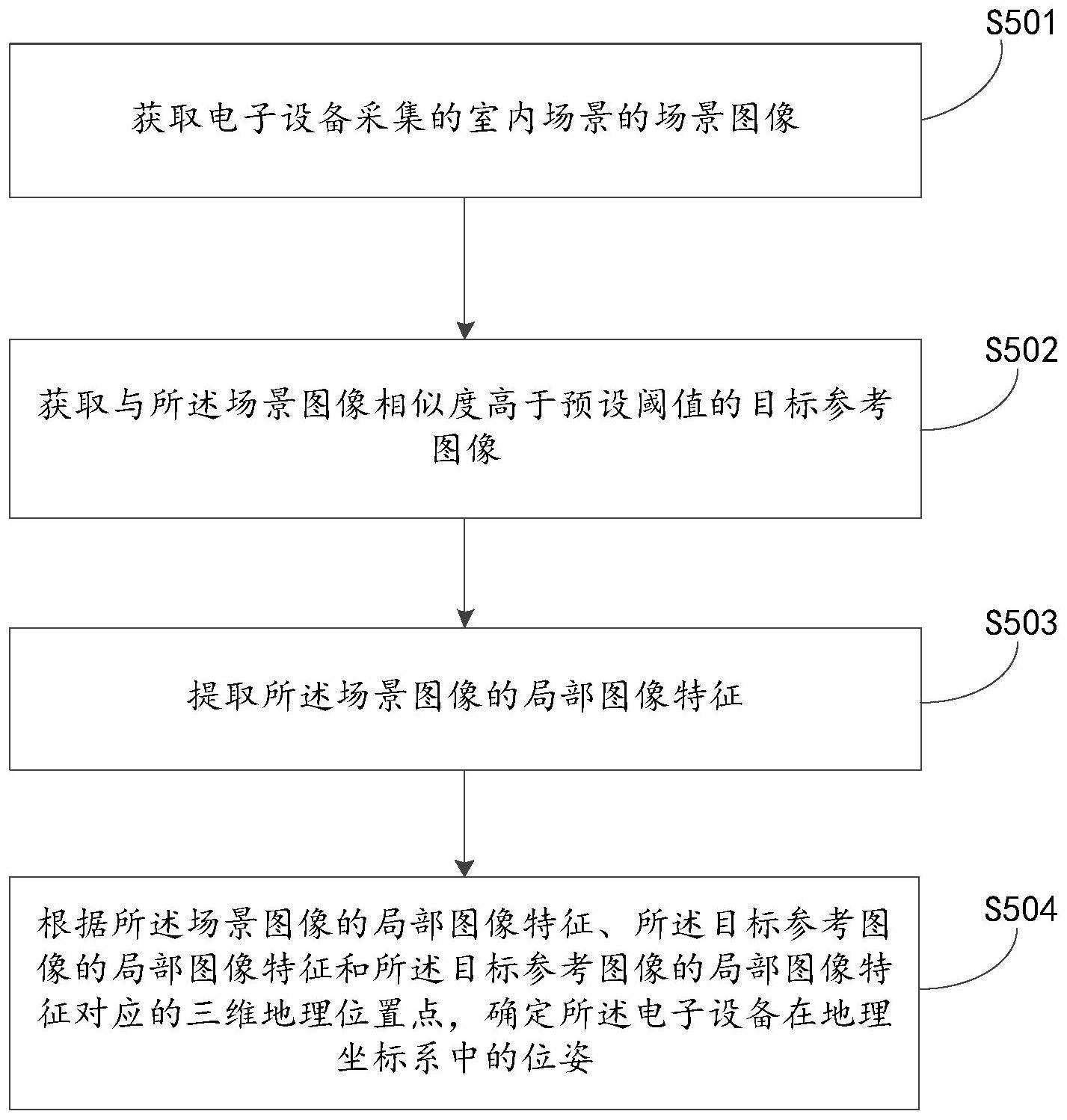
3、获取电子设备采集的室内场景的场景图像;
4、获取与所述场景图像相似度高于预设阈值的目标参考图像;
5、提取所述场景图像的局部图像特征;
6、根据所述场景图像的局部图像特征、所述目标参考图像的局部图像特征和所述目标参考图像的局部图像特征对应的三维地理位置点,确定所述电子设备在地理坐标系中的位姿。
7、可选的,所述根据所述场景图像的局部图像特征、所述目标参考图像的局部图像特征和所述目标参考图像的局部图像特征对应的三维地理位置点,确定所述电子设备在地理坐标系中的位姿,具体包括:
8、将所述场景图像的局部图像特征与所述目标参考图像的局部图像特征进行匹配,得到所述目标参考图像中与场景图像匹配的点作为匹配点,若所述目标参考图像的匹配点的数量达到预设的数量,则
9、根据所述场景图像的局部图像特征和所述匹配点对应的三维地理位置点,确定所述电子设备在地理坐标系中的位姿。
10、可选的,所述获取与所述场景图像相似度高于预设阈值的目标参考图像之前,具体包括所述方法进一步包括:
11、提取所述场景图像的全局图像特征;
12、根据所述场景图像的全局图像特征和参考图库中记录的参考图像的全局图像特征,得到参考图像与所述场景图像的相似度;其中,所述参考图库是基于预先获取的目标场景的图像的图像数据构建的。
13、可选的,所述方法进一步包括:
14、采集目标场景的图像;
15、获取所述目标场景的图像的图像数据;所述目标场景至少包括所述室内场景,所述图像数据包括图像的全局图像特征和图像的局部图像特征;
16、根据所述图像的局部图像特征,通过三维重建,得到所述图像的局部图像特征对应的三维点云;
17、确定所述三维点云中各三维点对应的三维地理位置点;
18、将所述图像数据以及对应的所述三维地理位置点对应存储至参考图库。
19、可选的,所述确定所述三维点云中各三维点对应的三维地理位置点,具体包括:
20、将所述三维点云中部分三维点与预先生成的所述目标场景对应的建筑物的轮廓进行对齐,得到三维点云和地理坐标系之间的映射关系;其中,所述建筑物的轮廓是由一系列的地理位置坐标表达;
21、根据所述三维点云和所述映射关系,得到所述三维点云中各三维点对应的三维地理位置点,所述三维地理位置点的信息包括地理位置坐标和绝对方向的信息。
22、可选的,所述电子设备中安装有电子地图的客户端;所述获取电子设备采集的室内场景的场景图像,具体包括:
23、接收所述电子地图的客户端发送的场景图像;
24、其中,所述电子地图的客户端用于提供拍摄周边图像的操作界面,所述操作界面上的提示信息用于指示用户按照相应提示上传当前的场景图像。
25、可选的,所述方法进一步包括:
26、基于所述位姿,在所述电子设备显示的室内电子地图中,显示所述电子设备的位置。
27、第二方面,本申请实施例提供一种定位装置,包括:
28、第一获取模块,用于获取电子设备采集的室内场景的场景图像;
29、第二获取模块,用于获取与所述场景图像相似度高于预设阈值的目标参考图像;
30、特征提取模块,用于提取所述场景图像的局部图像特征;
31、定位模块,用于根据所述场景图像的局部图像特征、所述目标参考图像的局部图像特征和所述目标参考图像的局部图像特征对应的三维地理位置点,确定所述电子设备在地理坐标系中的位姿。
32、第三方面,本申请实施例提供一种电子设备,包括:
33、至少一个处理器;以及
34、与所述至少一个处理器通信连接的存储器;
35、其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述电子设备执行上述任一方面所述的方法。
36、第四方面,本申请实施例提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述任一方面所述的方法。
37、本申请实施例提供的定位方法、装置、设备及程序产品,可以通过获取电子设备采集的室内场景的场景图像;进一步的,获取与所述场景图像相似度高于预设阈值的目标参考图像;进一步的,提取所述场景图像的局部图像特征;进一步的,根据所述场景图像的局部图像特征、所述目标参考图像的局部图像特征和所述目标参考图像的局部图像特征对应的三维地理位置点,确定所述电子设备在地理坐标系中的位姿。本申请可以采用基于图像的室内定位,通过用户使用的电子设备将采集所在室内场景的场景图像上传,在接收到该当前的场景图像时,开始查找与其相似度高于预设阈值的至少一张目标参考图像,然后通过提取场景图像的局部图像特征,结合已知目标参考图像的局部图像特征,目的是为了将场景图像的局部图像特征与目标参考图像的局部图像特征关联,并基于目标参考图像的局部图像特征对应的地理坐标系中的3d点,计算电子设备在地理坐标系中的位姿,实现了室内对用户所处位置和方向的定位。因此,本申请无需使用gnss信号对设备位置进行定位,解决了室内环境中,由于gnss信号被建筑遮挡,导致室内gnss信号弱或不可用带来的在室内无法通过gnss信号对设备位置进行定位的问题,能够为用户提供精确的位置和方向,提升用户体验。
技术特征:
1.一种定位方法,其中,所述方法包括:
2.根据权利要求1所述的方法,其中,所述根据所述场景图像的局部图像特征、所述目标参考图像的局部图像特征和所述目标参考图像的局部图像特征对应的三维地理位置点,确定所述电子设备在地理坐标系中的位姿,具体包括:
3.根据权利要求1所述的方法,其中,获取与所述场景图像相似度高于预设阈值的目标参考图像之前,所述方法进一步包括:
4.根据权利要求3所述的方法,其中,所述方法进一步包括:
5.根据权利要求4所述的方法,其中,所述确定所述三维点云中各三维点对应的三维地理位置点,具体包括:
6.根据权利要求1-5任一项所述的方法,其中,所述电子设备中安装有电子地图的客户端;所述获取电子设备采集的室内场景的场景图像,具体包括:
7.根据权利要求6所述的方法,其中,所述方法进一步包括:
8.一种定位装置,其中,包括:
9.一种电子设备,其中,包括:
10.一种计算机程序产品,包括计算机程序,其中,该计算机程序被处理器执行时实现如权利要求1-7任一项所述的方法。
技术总结
本申请提供一种定位方法、装置、设备及程序产品,该方法包括:获取电子设备采集的室内场景的场景图像;获取与所述场景图像相似度高于预设阈值的目标参考图像;提取所述场景图像的局部图像特征;根据所述场景图像的局部图像特征、所述目标参考图像的局部图像特征和所述目标参考图像的局部图像特征对应的三维地理位置点,确定所述电子设备在地理坐标系中的位姿。本申请能够为用户提供室内精确的位置和方向,提升用户体验。
技术研发人员:侯喆,白延成,赵晨旭,高莉,蔡炀,刘柳
受保护的技术使用者:阿里巴巴(中国)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!