一种路侧附属设施的建档及缺损识别方法及系统与流程
本发明涉及驾驶感知领域,具体是一种路侧附属设施的建档及缺损识别方法及系统。
背景技术:
1、交通标牌、路侧附属(如路侧箱体、里程碑、禁车柱、垃圾桶、公交站亭、龙门架等)设施是道路交通重要的资产,对道路资产的感知、盘点是道路巡查、道路管养中一项重要的工作。交通标牌、路侧附属设施并非完全的固定不变,在使用过程中会由于更换、新增、缺损而发生状态改变,因此在对附属设施进行感知、盘点的同时,对其状态的更新维护也是一项重要的工作。随着人工智能、大数据等技术的不断发展和应用,智慧化的感知技术不断趋于成熟,使用智能化手段对标牌、路侧设施进行感知、建档、状态更新是一个重要的趋势。
2、目前有一些人工智能算法已经应用于标牌设施的检测识别,但依然存在一些影响效率的细节问题,比如,为了避免数据遗漏,需要对多次采集的结果进行分析整理,这种方式虽然可以避免数据的遗漏,但是需要进行重复数据的去除,去除工作依赖于人工;此外,标牌、路侧设施是会动态更新、变化,因此完成设施建档后需要根据实际的标牌情况进行动态更新,例如增加了新的设施,以及部分已经感知的设施出现了缺失或损坏。目前设施的缺失主要还是依赖人工来判断、上报,效率低,且不能及时发现丢失、变化情况。
技术实现思路
1、本发明的目的在于提供一种路侧附属设施的建档及缺损识别方法及系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种路侧附属设施的建档及缺损识别方法,所述方法包括:
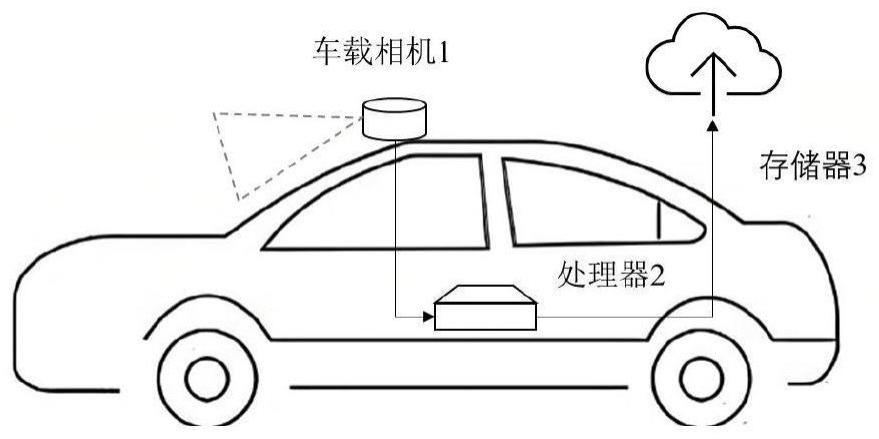
4、基于预设的车载设备获取待检数据;所述待检数据包括图像数据、车辆经纬度、方位角和获取时间,所述待检数据基于获取时间进行排序存储;
5、对所述图像数据进行识别,定位目标物并提取目标物区域;
6、根据预设的投影关系确定目标物区域的经纬度;
7、根据预设的特征提取算法获取目标物区域的特征向量,基于特征向量匹配目标物集合;
8、基于匹配到的目标物集合更新设施列表。
9、作为本发明进一步的方案:所述基于预设的车载设备获取待检数据的步骤包括:
10、实时获取车辆速度,根据所述车辆速度生成含有采集频率的采集指令;
11、其中,获取车辆速度的步骤包括:
12、通过定位模块获取车辆的实时车速;以及
13、通过编码器获取车辆的行进距离,根据行进距离确定车辆的实时车速。
14、作为本发明进一步的方案:所述对所述图像数据进行识别,定位目标物并提取目标物区域的步骤包括:
15、查询相机的型号,根据所述型号查询相机内参;
16、基于所述相机内参对所述图像数据进行识别,定位目标物;
17、根据定位结果提取目标物区域。
18、作为本发明进一步的方案:所述根据预设的投影关系确定目标物区域的经纬度的步骤包括:
19、根据预设的投影关系将图像数据转换为俯视图像;
20、在所述俯视图像中标记与目标物区域对应的投影区域;
21、计算车辆与投影区域间的位置关系,结合车辆经纬度和方位角计算目标物的经纬度并记录计算时间。
22、作为本发明进一步的方案:所述根据预设的特征提取算法获取目标物区域的特征向量,基于特征向量匹配目标物集合的步骤包括:
23、基于预设的深度特征提取网络对目标物区域进行识别,得到目标物区域的特征向量;
24、读取目标物的经纬度和计算时间,根据所述经纬度、所述计算时间和所述特征向量在预设的特征库中进行混合搜索;
25、其中,所述特征库为对所有历史目标数据,使用特征提取网络,提取出特征向量,结合对应的经纬度、方位角、时间、目标物参数生成的特征向量数据库;
26、所述混合搜索包括标量搜索和向量搜索。
27、本发明技术方案还提供了一种路侧附属设施的建档及缺损识别系统,所述系统包括:
28、待检数据获取模块,用于基于预设的车载设备获取待检数据;所述待检数据包括图像数据、车辆经纬度、方位角和获取时间,所述待检数据基于获取时间进行排序存储;
29、定位提取模块,用于对所述图像数据进行识别,定位目标物并提取目标物区域;
30、经纬度计算模块,用于根据预设的投影关系确定目标物区域的经纬度;
31、目标物匹配模块,用于根据预设的特征提取算法获取目标物区域的特征向量,基于特征向量匹配目标物集合;
32、设施列表更新模块,用于基于匹配到的目标物集合更新设施列表。
33、作为本发明进一步的方案:所述待检数据获取模块包括:
34、指令采集单元,用于实时获取车辆速度,根据所述车辆速度生成含有采集频率的采集指令;
35、其中,获取车辆速度的内容包括:
36、通过定位模块获取车辆的实时车速;以及
37、通过编码器获取车辆的行进距离,根据行进距离确定车辆的实时车速。
38、作为本发明进一步的方案:所述定位提取模块包括:
39、内参查询单元,用于查询相机的型号,根据所述型号查询相机内参;
40、定位执行单元,用于基于所述相机内参对所述图像数据进行识别,定位目标物;
41、提取执行单元,用于根据定位结果提取目标物区域。
42、作为本发明进一步的方案:所述经纬度计算模块包括:
43、图像转换单元,用于根据预设的投影关系将图像数据转换为俯视图像;
44、投影区标记单元,用于在所述俯视图像中标记与目标物区域对应的投影区域;
45、计算执行单元,用于计算车辆与投影区域间的位置关系,结合车辆经纬度和方位角计算目标物的经纬度并记录计算时间。
46、作为本发明进一步的方案:所述目标物匹配模块包括:
47、向量提取单元,用于基于预设的深度特征提取网络对目标物区域进行识别,得到目标物区域的特征向量;
48、混合搜索单元,用于读取目标物的经纬度和计算时间,根据所述经纬度、所述计算时间和所述特征向量在预设的特征库中进行混合搜索;
49、其中,所述特征库为对所有历史目标数据,使用特征提取网络,提取出特征向量,结合对应的经纬度、方位角、时间、目标物参数生成的特征向量数据库;
50、所述混合搜索包括标量搜索和向量搜索。
51、与现有技术相比,本发明的有益效果是:本发明通过特征向量、经纬度、方位角、时间等数据进行混合搜索,在同一个地点,多次识别的目标物可自动进行关联,基于多次识别的数据可有效规避遗漏,从而实现设施资产清单表的动态增加、维护,极大地提高了智能化水平。
技术特征:
1.一种路侧附属设施的建档及缺损识别方法,其特征在于,所述方法包括:
2.根据权利要求1所述的路侧附属设施的建档及缺损识别方法,其特征在于,所述基于预设的车载设备获取待检数据的步骤包括:
3.根据权利要求1所述的路侧附属设施的建档及缺损识别方法,其特征在于,所述对所述图像数据进行识别,定位目标物并提取目标物区域的步骤包括:
4.根据权利要求1所述的路侧附属设施的建档及缺损识别方法,其特征在于,所述根据预设的投影关系确定目标物区域的经纬度的步骤包括:
5.根据权利要求1所述的路侧附属设施的建档及缺损识别方法,其特征在于,所述根据预设的特征提取算法获取目标物区域的特征向量,基于特征向量匹配目标物集合的步骤包括:
6.一种路侧附属设施的建档及缺损识别系统,其特征在于,所述系统包括:
7.根据权利要求6所述的路侧附属设施的建档及缺损识别系统,其特征在于,所述待检数据获取模块包括:
8.根据权利要求6所述的路侧附属设施的建档及缺损识别系统,其特征在于,所述定位提取模块包括:
9.根据权利要求6所述的路侧附属设施的建档及缺损识别系统,其特征在于,所述经纬度计算模块包括:
10.根据权利要求6所述的路侧附属设施的建档及缺损识别系统,其特征在于,所述目标物匹配模块包括:
技术总结
本发明涉及驾驶感知领域,具体公开了一种路侧附属设施的建档及缺损识别方法及系统,所述方法包括基于预设的车载设备获取待检数据;所述待检数据包括图像数据;对所述图像数据进行识别,定位目标物并提取目标物区域;根据预设的投影关系确定目标物区域的经纬度;根据预设的特征提取算法获取目标物区域的特征向量,基于特征向量匹配目标物集合;基于匹配到的目标物集合更新设施列表。本发明通过特征向量、经纬度、方位角、时间等数据进行混合搜索,在同一个地点,多次识别的目标物可自动进行关联,基于多次识别的数据可有效规避遗漏,从而实现设施资产清单表的动态增加、维护,极大地提高了智能化水平。
技术研发人员:钟盛,周审章,严京旗
受保护的技术使用者:上海同陆云交通科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!