一种融合图像特征与GPS信息的光伏电站全景拼接方法
本发明涉及一种融合图像特征与gps信息的光伏电站全景拼接技术,属于光伏电站巡检与智能运维。
背景技术:
1、随着光伏发电装机容量的持续增长,光伏电站的运维问题备受关注。安装在户外的光伏组件可能发生故障、缺陷、遮挡等情况,不仅造成输出功率损失,而且影响光伏系统的稳定性。及时检测出光伏组件的异常情况,并且采取合理的运维方式,对于提高光伏电站的有效性和安全性具有十分重要的意义。
2、随着无人机领域与人工智能领域的蓬勃发展,可以通过无人机搭载云台,采集光伏组件的可见光图像与红外热成像,结合智能诊断方法,筛选出异常组件。相比于人工巡检,无人机巡检具有效率高、成本低、操作灵活等优势。无人机巡检不仅适用于分布式光伏电站,也适用于大规模光伏电站,具有广阔的应用前景。
3、现有技术针对光伏组件的可见光图像与红外热成像,已经实现了故障缺陷、温度异常、局部遮挡的自动检测。然而,现有技术(例如航空三角测量与陆地影像配准)将图像中的组件与光伏电站中的组件进行匹配时,难以利用上述图像处理层面的检测结果。如何将图像处理方法与组件匹配方法进行有效结合,实现光伏电站的全景可视化与异常组件定位,是实际运维中需要考虑的重要问题。
技术实现思路
1、发明目的:本发明的目的在于解决现有技术中存在的不足,从光伏电站的运维角度出发,结合图像处理方法,将图像中的组件与光伏电站中的组件进行匹配,提供一种融合图像特征与gps信息的光伏电站全景拼接方法。
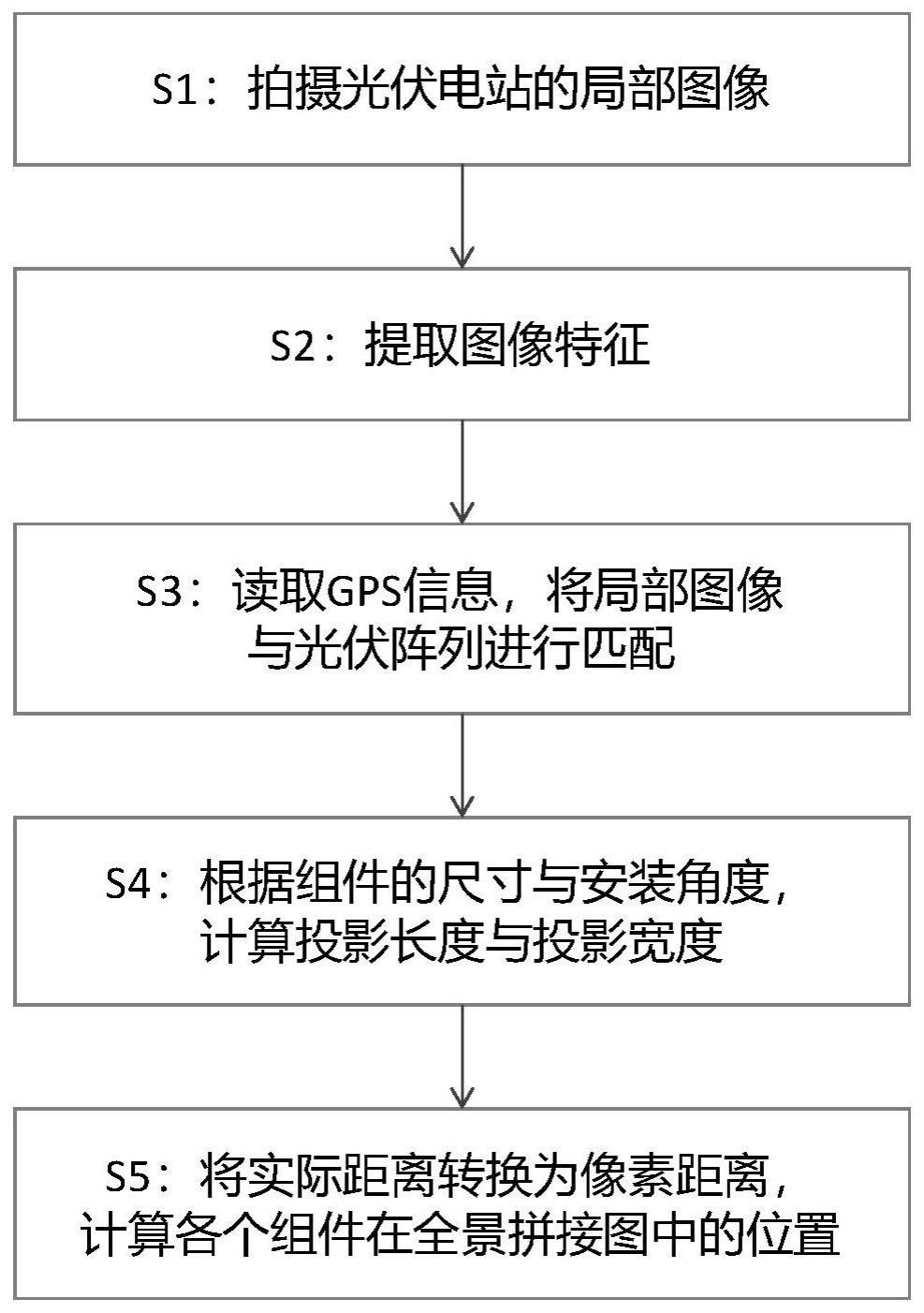
2、技术方案:本发明的一种融合图像特征与gps信息的光伏电站全景拼接方法,依次包括以下步骤:
3、s1:拍摄光伏电站的局部图像;
4、s2:识别图像中的光伏组件,提取特征点,矫正透视形变;
5、s3:读取图像的gps信息,对纬度与经度进行聚类,根据簇中心的位置,将局部图像与光伏阵列进行匹配;
6、s4:根据光伏组件的尺寸与安装角度,计算光伏组件的投影长度与投影宽度;
7、s5:根据组件间距与阵列间距,将实际距离转换为像素距离,计算各个组件在全景拼接图中的位置。
8、进一步的,所述步骤s1中,光伏电站包括若干光伏阵列,每个阵列包括若干光伏组件;通过无人机搭载云台,拍摄光伏电站的局部图像;每张局部图像仅涉及一个阵列的全部或部分组件,每个组件至少在某张局部图像中完整出现一次。
9、进一步的,所述步骤s2中,采用图像处理方法,识别局部图像中的光伏组件。将组件的角点作为特征点,用(uijk,vijk)t表示第i个阵列第j个组件第k个特征点(k=1,2,3,4)的像素坐标。
10、进一步的,所述步骤s2中,用hij表示第i个阵列第j个组件的透视形变齐次矩阵,根据特征点列出方程组其中wijk=(uijk,vijk,1)t表示特征点在图像中的像素齐次坐标,表示特征点在理想情况下的齐次坐标,可以根据组件尺寸进行设置。根据特征点的方程组求解矩阵hij,矫正光伏组件的透视形变。
11、进一步的,所述步骤s3中,用la,r与lo,r分别表示第r张局部图像的纬度与经度,re表示地球半径(近似为6371km),计算第r张局部图像的拍摄点在纬度方向与经度方向的坐标xr与yr如下:
12、xr=lo,r·π/180·re
13、yr=la,r·π/180·re·cos(lo,r·π/180)
14、采用dbscan算法对局部图像的坐标(xr,yr)t进行聚类,每一簇表示一个光伏阵列的局部图像。将每一簇的坐标均值作为簇中心,根据簇中心的位置,判断光伏阵列所在的行与列。
15、进一步的,所述步骤s4中,用sl,m与sw,m分别表示光伏组件的长度和宽度,di,l与di,w分别表示组件长边与短边的内缘距离,α表示组件的安装角度,计算组件有效区域的长度sl与宽度sw,以及组件有效区域的投影长度sl,p与投影宽度sw,p如下:
16、sl=sl,m-2·di,w
17、sw=sw,m-2·di,l
18、sl,p=sl·cos(α)
19、sw,p=sw
20、进一步的,所述步骤s5中,用do,l与do,w分别表示组件长边与短边的外缘间距,计算组件有效区域在纬度方向与经度方向的间距dm,la与dm,lo如下:
21、dm,la=do,l+2·di,l
22、dm,lo=(do,w+2·di,w)·cos(α)
23、计算光伏阵列的列间距dcol与行间距drow如下:
24、
25、
26、其中,nr与nc分别表示光伏阵列的总行数与总列数;rla表示光伏电站所在地的纬线圈半径,
27、
28、进一步的,所述步骤s5中,定义实际距离转换为像素距离的比例,结合光伏阵列所在的行与列,组件的投影长度与投影宽度,组件间距与阵列间距,计算所述步骤s2中,矫正透视形变后的各个组件在全景拼接图中的位置。
29、有益效果:本发明提供了一种融合图像特征与gps信息的光伏电站全景拼接方法,基于无人机巡检拍摄的可见光图像与红外热成像,识别光伏组件并且提取图像特征,利用gps信息将图像中的组件与光伏电站中的组件进行自动匹配。通过图像特征与gps信息的有效融合,实现光伏电站的全景可视化。该方法可以结合图像处理方法,实现异常组件的检测与定位。该方法可以用于光伏电站的智能巡检与智慧运维。
技术特征:
1.一种融合图像特征与gps信息的光伏电站全景拼接方法,其特征在于:依次包括以下步骤:
2.根据权利要求1所述的一种融合图像特征与gps信息的光伏电站全景拼接方法,其特征在于:所述步骤s1中,光伏电站包括若干光伏阵列,每个阵列包括若干光伏组件;通过无人机搭载云台,拍摄光伏电站的局部图像;每张局部图像仅涉及一个阵列的全部或部分组件,每个组件至少在某张局部图像中完整出现一次。
3.根据权利要求1所述的一种融合图像特征与gps信息的光伏电站全景拼接方法,其特征在于:所述步骤s2中,采用图像处理方法,识别局部图像中的光伏组件;将组件的角点作为特征点,用(uijk,vijk)t表示第i个阵列第j个组件第k个特征点的像素坐标,其中k=1,2,3,4。
4.根据权利要求1所述的一种融合图像特征与gps信息的光伏电站全景拼接方法,其特征在于:所述步骤s2中,用hij表示第i个阵列第j个组件的透视形变齐次矩阵,根据特征点列出方程组其中wijk=(uijk,vijk,1)t表示特征点在图像中的像素齐次坐标,表示特征点在理想情况下的齐次坐标,根据组件尺寸进行设置;根据特征点的方程组求解矩阵hij,矫正光伏组件的透视形变。
5.根据权利要求1所述的一种融合图像特征与gps信息的光伏电站全景拼接方法,其特征在于:所述步骤s3中,用la,r与lo,r分别表示第r张局部图像的纬度与经度,re表示地球半径,计算第r张局部图像的拍摄点在纬度方向与经度方向的坐标xr与yr如下:
6.根据权利要求1所述的一种融合图像特征与gps信息的光伏电站全景拼接方法,其特征在于:所述步骤s4中,用sl,m与sw,m分别表示光伏组件的长度和宽度,di,l与di,w分别表示组件长边与短边的内缘距离,α表示组件的安装角度,计算组件有效区域的长度sl与宽度sw,以及组件有效区域的投影长度sl,p与投影宽度sw,p如下:
7.根据权利要求1所述的一种融合图像特征与gps信息的光伏电站全景拼接方法,其特征在于:所述步骤s5中,用do,l与do,w分别表示组件长边与短边的外缘间距,计算组件有效区域在纬度方向与经度方向的间距dm,la与dm,lo如下:
8.根据权利要求1所述的一种融合图像特征与gps信息的光伏电站全景拼接方法,其特征在于:所述步骤s5中,定义实际距离转换为像素距离的比例,结合光伏阵列所在的行与列,组件的投影长度与投影宽度,组件间距与阵列间距,计算所述步骤s2中,矫正透视形变后的各个组件在全景拼接图中的位置。
技术总结
本发明公开一种融合图像特征与GPS信息的光伏电站全景拼接方法,包括以下步骤:拍摄光伏电站的局部图像;识别图像中的光伏组件,提取特征点,矫正透视形变;读取图像的GPS信息,对纬度与经度进行聚类,根据簇中心的位置,将局部图像与光伏阵列进行匹配;根据光伏组件的尺寸与安装角度,计算光伏组件的投影长度与投影宽度;根据组件间距与阵列间距,将实际距离转换为像素距离,计算各个组件在全景拼接图中的位置。本发明融合了图像中的光伏组件特征与拍摄点的GPS信息,有效实现了光伏电站的全景拼接,可以用于无人机巡检、光伏组件的智能诊断与可视化。
技术研发人员:沈堉,曾鹏中,胡语涵,童朝流,张侃健,魏海坤
受保护的技术使用者:东南大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!