隧道变形分析方法、系统、计算机设备及可读存储介质与流程
本发明涉及领域,特别涉及一种隧道变形分析方法、系统、计算机设备及可读存储介质。
背景技术:
1、隧道开挖后,由于初始地应力场的应力释放,其结果必然引起围岩发生各种形态的变形,如拱顶下沉、两侧围岩挤入、底部鼓起以及掌子面挤出等,而变形的必然后果,就是造成围岩的松弛,而当围岩的变形或松弛超过一定范围时,就会造成崩塌或不稳定。
2、隧道变形分析是评估隧道结构变形情况以及安全性的重要手段之一。目前,传统的监测手段多用全站仪、收敛计对埋设在隧道周边、拱顶、拱腰或边墙部位里的测点进行测量,获取单点、单断面的变化情况,传统模式的测量效率有限,测量的结果也不能全面反应隧道的区域变形及整体位移情况。
技术实现思路
1、基于此,本发明的目的是提供一种隧道变形分析方法、系统、计算机设备及可读存储介质,以解决现有技术中的不足。
2、为实现上述目的,本发明提供一种隧道变形分析方法,所述方法包括:
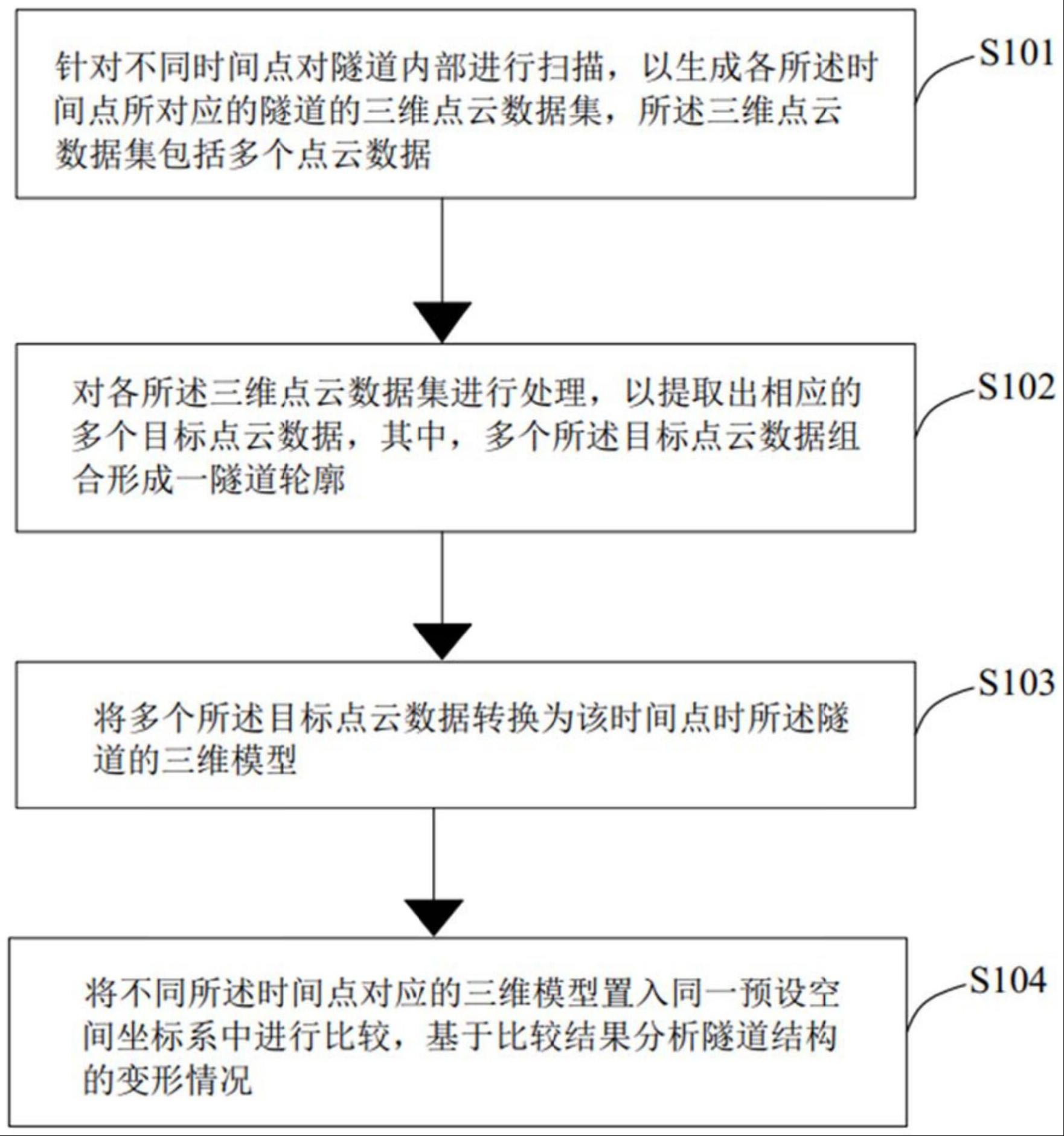
3、针对不同时间点对隧道内部进行扫描,以生成各所述时间点所对应的隧道的三维点云数据集,所述三维点云数据集包括多个点云数据;
4、对各所述三维点云数据集进行处理,以提取出相应的多个目标点云数据,其中,多个所述目标点云数据组合形成一隧道轮廓;
5、将多个所述目标点云数据转换为该时间点时所述隧道的三维模型;
6、将不同所述时间点对应的三维模型置入同一预设空间坐标系中进行比较,基于比较结果分析隧道结构的变形情况。
7、本发明的有益效果是:通过在不同时间点对隧道内部进行扫描,对不同时间点时隧道的三维点云数据集进行处理,然后将处理后的数据转换为相应的三维模型,将各三维模型置于同一预设空间坐标系内进行比较,以基于比较结果来分析隧道结构的变形情况,相较于传统的全站仪测量方法,不仅能够更加全面、准确地发现形变区域,定性地指示出隧道的整体变形趋势,同时效率也有很大提升,适用性更广。
8、优选的,所述针对不同时间点对隧道内部进行扫描的步骤包括:
9、在隧道的目标位置布设靶球或靶纸;
10、针对不同时间点并通过三维激光扫描扫描仪或相机扫描识别所述靶球或所述靶纸的中心部位。
11、优选的,所述将不同所述时间点对应的三维模型置入同一预设空间坐标系中进行比较,基于比较结果分析隧道结构的变形情况的步骤包括:
12、将不同所述时间点对应的三维模型置入同一预设空间坐标系中,通过空间八叉树的方式生成各所述三维模型对应的三维网格;
13、基于预设设计线路计算各所述三维网格的网格数据;
14、通过icp配准算法将不同所述三维模型中的三维网格进行配准和对齐,以获得最佳匹配,其中,所述最佳匹配为相邻两个所述三维模型中三维网格之间的最佳位置对应关系;
15、基于所述最佳匹配和所述网格数据计算不同所述时间点的隧道的变形量,并通过相对应的三维网格的坐标变化分析隧道结构的变形情况。
16、优选的,所述通过icp配准算法将不同所述三维模型中的三维网格进行配准和对齐,以获得最佳匹配的步骤包括:
17、获取各所述三维模型所对应的初始点集,所述初始点集包括多个点,各所述点为对应所述三维网格的中心;
18、选取任一所述三维模型的初始点集,通过计算该初始点集中的每个点到参考点集的最小欧式距离,以得到对应该时间点的目标点集;
19、通过svd分解原理求解所述目标点集的刚体变换矩阵,并计算该三维模型的初始点集和目标点集分别映射到相邻所述三维模型的初始点集的第一映射距离和第二映射距离;
20、计算所述第一映射距离和所述第二映射距离的平方和,得到相对计算值;
21、当所述相对计算值小于预设参照阈值时,获得最佳匹配。
22、优选的,所述方法还包括:
23、基于所述最佳匹配计算出相邻所述三维模型中各三维网格之间的距离,以得到单个所述三维网格的变形数据;
24、获取各所述三维模型中每循环相同里程得到变形数据,以统计各所述三维模型的区域变形数据。
25、为实现上述目的,本发明还提供了一种隧道变形分析系统,所述系统包括:
26、扫描模块,用于针对不同时间点对隧道内部进行扫描,以生成各所述时间点所对应的隧道的三维点云数据集,所述三维点云数据集包括多个点云数据;
27、提取模块,用于对各所述三维点云数据集进行处理,以提取出相应的多个目标点云数据,其中,多个所述目标点云数据组合形成一隧道轮廓;
28、转换模块,用于将多个所述目标点云数据转换为该时间点时所述隧道的三维模型;
29、比较模块,用于将不同所述时间点对应的三维模型置入同一预设空间坐标系中进行比较,基于比较结果分析隧道结构的变形情况。
30、优选的,所述扫描模块包括:
31、布设单元,用于在隧道的目标位置布设靶球或靶纸;
32、扫描单元,用于针对不同时间点并通过三维激光扫描扫描仪或相机扫描识别所述靶球或所述靶纸的中心部位。
33、优选的,所述比较模块包括:
34、生成单元,用于将不同所述时间点对应的三维模型置入同一预设空间坐标系中,通过空间八叉树的方式生成各所述三维模型对应的三维网格;
35、第一计算单元,用于基于预设设计线路计算各所述三维网格的网格数据;
36、配准单元,用于通过icp配准算法将不同所述三维模型中的三维网格进行配准和对齐,以获得最佳匹配,其中,所述最佳匹配为相邻两个所述三维模型中三维网格之间的最佳位置对应关系;
37、第二计算单元,用于基于所述最佳匹配和所述网格数据计算不同时间点的隧道的变形量,并通过相对应的三维网格的坐标变化分析隧道的变形情况。
38、为实现上述目的,本发明还提供了一种计算机设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述中所述的隧道变形分析方法。
39、为实现上述目的,本发明还提供了一种可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如上述中所述的隧道变形分析方法。
40、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种隧道变形分析方法,其特征在于,所述方法包括:
2.根据权利要求1所述的隧道变形分析方法,其特征在于,所述针对不同时间点对隧道内部进行扫描的步骤包括:
3.根据权利要求1所述的隧道变形分析方法,其特征在于,所述将不同所述时间点对应的三维模型置入同一预设空间坐标系中进行比较,基于比较结果分析隧道结构的变形情况的步骤包括:
4.根据权利要求1所述的隧道变形分析方法,其特征在于,所述通过icp配准算法将不同所述三维模型中的三维网格进行配准和对齐,以获得最佳匹配的步骤包括:
5.根据权利要求1所述的隧道变形分析方法,其特征在于,所述方法还包括:
6.一种隧道变形分析系统,其特征在于,所述系统包括:
7.根据权利要求6所述的隧道变形分析系统,其特征在于,所述扫描模块包括:
8.根据权利要求6所述的隧道变形分析系统,其特征在于,所述比较模块包括:
9.一种计算机设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至5中任一项所述的隧道变形分析方法。
10.一种可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1至5中任一项所述的隧道变形分析方法。
技术总结
本发明提供了一种隧道变形分析方法、系统、计算机设备及可读存储介质,该方法包括:针对不同时间点对隧道内部进行扫描,以生成各所述时间点所对应的隧道的三维点云数据集,所述三维点云数据集包括多个点云数据;对各所述三维点云数据集进行处理,以提取出相应的多个目标点云数据,其中,多个所述目标点云数据组合形成一隧道轮廓;将多个所述目标点云数据转换为该时间点时所述隧道的三维模型;将不同所述时间点对应的三维模型置入同一预设空间坐标系中进行比较,基于比较结果分析隧道结构的变形情况。通过本申请,不仅能够更加全面、准确地发现形变区域,定性地指示出隧道的整体变形趋势,同时效率也有很大提升,适用性更广。
技术研发人员:李郴,章新生,周大林,李强,梁文琴,胡鹏,黄敏,彭涛,樊东博,纪凯,罗青永,刘福
受保护的技术使用者:中铁四局集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!