一种重叠颗粒物的分离和轮廓重建方法及系统
本发明涉及数字图像处理,尤其涉及一种重叠颗粒物的分离和轮廓重建方法及系统。
背景技术:
1、近年来,利用图像处理技术的自动计数方法被应用于许多领域,特别是在农业自动化领域,基于机器视觉的计数方法有效的克服了人工计数的诸多缺点。在颗粒物计数过程中,会出现多层重叠遮挡的情况,严重影响了计数的准确率,因此重叠颗粒物的计数已成为自动计数系统中的难题,也引起了许多学者的关注。目前重叠颗粒物的自动计数方法中存在计数准确率不高且无法在颗粒物完全重叠的情况下计数的缺陷。
技术实现思路
1、为了解决上述技术问题,本发明的目标是提供一种重叠颗粒物的分离和轮廓重建方法及系统,能够将重叠颗粒物从所有颗粒物中筛选出来并且较好地分离,还可以对残缺地轮廓进行较好较精确的拟合,最终实现计数。
2、本发明所采用的第一技术方案是:一种重叠颗粒物的分离和轮廓重建方法,包括以下步骤:
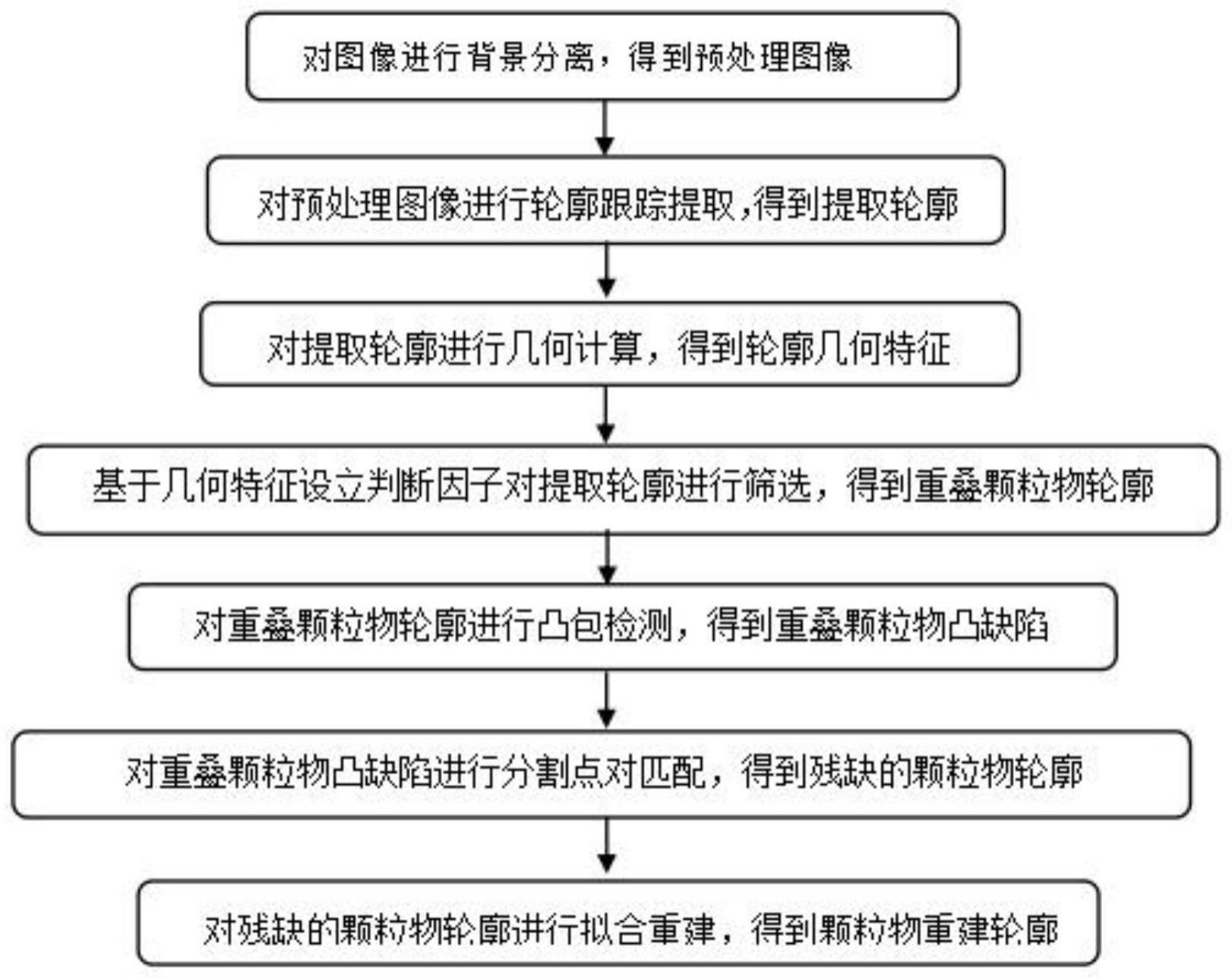
3、对图像进行背景分离,得到预处理图像;
4、对预处理图像进行轮廓跟踪提取,得到提取轮廓;
5、对提取轮廓进行几何计算,得到轮廓几何特征;
6、基于几何特征设立判断因子对提取轮廓进行筛选,得到重叠颗粒物轮廓;
7、对重叠颗粒物轮廓进行凸包检测,得到重叠颗粒物凸缺陷;
8、对重叠颗粒物凸缺陷进行分割点对匹配,得到残缺的颗粒物轮廓;
9、对残缺的颗粒物轮廓进行拟合重建,得到颗粒物重建轮廓。进一步,所述对图像进行背景分离,得到预处理图像这一步骤,其具体包括:
10、将输入图像进行灰度转换,得到灰度图像;
11、基于大律法对灰度图像进行二值转换,得到二值图像;
12、对二值图像进行中值滤波,得到预处理图像。
13、通过该优选步骤,能够使得目标颗粒物与背景分离出来。
14、进一步,所述对预处理图像进行轮廓跟踪提取,得到提取轮廓这一步骤,其具体包括:
15、基于边界序号和像素点像素值通过光栅扫描法扫描预处理图像,得到轮廓起始点;
16、基于轮廓起始点对像素点进行边界跟踪,得到轮廓像素点;
17、循环像素点扫描跟踪,直至完成图像最右下角像素点扫描跟踪,得到提取轮廓。
18、通过该优选步骤,能够提取图像中未重叠颗粒物的轮廓及重叠颗粒物的整体外轮廓。
19、进一步,所述对提取轮廓进行几何计算,得到轮廓几何特征这一步骤,所述轮廓几何特征包括轮廓面积、轮廓周长、轮廓矩、轮廓知心。
20、通过该优选步骤,能够得到轮廓的几何特征,为后续的第一层筛选提供判断依据。
21、进一步,所述基于几何特征设立判断因子对提取轮廓进行筛选,得到重叠颗粒物轮廓这一步骤,其判断因子的数学表达式如下:
22、
23、
24、
25、其中factor表示判断因子,roundness表示圆形度,compactness表示密实度,area表示轮廓面积,peri表示轮廓周长,area1表示轮廓面积,area2表示最小外接圆面积。
26、通过该优选步骤,综合了圆形度和密实度对颗粒物图像对圆形接近度的表征,实现对重叠颗粒物的第一层筛选,筛选出重叠颗粒物。
27、进一步,所述对重叠颗粒物轮廓进行凸包检测,得到重叠颗粒物凸缺陷这一步骤,其具体包括:
28、对重叠颗粒物轮廓的所有点建立新的直角坐标系;
29、基于原点和栈顶点的连线对当前点进行凸包算法检测,得到凸包;
30、基于重叠颗粒物轮廓和凸包之差,得到凸缺陷;
31、对凸缺陷进行面积筛选,得到重叠颗粒物凸缺陷。
32、通过该优选步骤,将轮廓表面的许多不平整小凸缺陷筛选掉。
33、进一步,所述对重叠颗粒物凸缺陷进行分割点对匹配,得到残缺的颗粒物轮廓这一步骤,其具体包括:
34、基于重叠颗粒物凸缺陷的起始点、终止点和距离凸包最远点构建凸缺陷三角形;
35、以最远点为顶点通过角平分线匹配算法对凸缺陷三角形像素点进行遍历,得到第一角平分线;
36、遍历凸缺陷的像素点,得到距离第一角平分线最近的像素点;
37、以距离第一角平分线最近的像素点为顶点通过角平分线匹配算法对凸缺陷三角形像素点进行遍历,得到第二角平分线;
38、遍历凸缺陷的像素点,得到距离第二角平分线最近的像素点;
39、基于匹配条件进行判断,得到残缺的颗粒物轮廓。
40、通过该优选步骤,进行放大重叠颗粒物进行精细化处理,能够将重叠颗粒物匹配分割成不重叠的残缺颗粒物。
41、进一步,所述对残缺的颗粒物轮廓进行拟合重建,得到颗粒物重建轮廓这一步骤,其拟合表达式如下:
42、
43、
44、
45、其中p(t)表示k次b样条曲线,pi表示k次b样条曲线的控制点,bi,k(t)表示k次b样条的关于t的基函数,t表示节点,ti表示曲线上第i个点。
46、通过该优选步骤,将残缺重叠颗粒物因重叠缺少的部分轮廓重建完整。
47、本发明所采用的第二技术方案是:一种重叠颗粒物的分离和轮廓重建系统,包括:
48、预处理模块,用于对图像进行背景分离,得到预处理图像;
49、轮廓提取模块,用于对预处理图像进行轮廓跟踪提取,得到提取轮廓;
50、几何计算模块,用于对提取轮廓进行几何计算,得到轮廓几何特征;
51、轮廓筛选模块,基于几何特征设立判断因子对提取轮廓进行筛选,得到重叠颗粒物轮廓;
52、凸包检测模块,用于对重叠颗粒物轮廓进行凸包检测,得到重叠颗粒物凸缺陷;
53、匹配模块,用于对重叠颗粒物凸缺陷进行分割点对匹配,得到残缺的颗粒物轮廓;
54、拟合重建模块,用于对残缺的颗粒物轮廓进行拟合重建,得到颗粒物重建轮廓。
55、本发明方法及系统的有益效果是:本发明通过对图片或视频资料进行预处理,使得目标颗粒物与背景分离出来;通过轮廓提取、几何特征计算和构建判断因子筛选出重叠颗粒物;通过分割点对匹配和轮廓拟合重建把重叠颗粒物的重叠部分轮廓进行补充重建;最后将所有颗粒物的数量和几何特征输出,实现自动化计数和几何特征分析。
技术特征:
1.一种重叠颗粒物的分离和轮廓重建方法,其特征在于,包括以下步骤:
2.根据权利要求1所述一种重叠颗粒物的分离和轮廓重建方法,其特征在于,所述对图像进行背景分离,得到预处理图像这一步骤,其具体包括:
3.根据权利要求1所述一种重叠颗粒物的分离和轮廓重建方法,其特征在于,所述对预处理图像进行轮廓跟踪提取,得到提取轮廓这一步骤,其具体包括:
4.根据权利要求1所述一种重叠颗粒物的分离和轮廓重建方法,其特征在于,所述轮廓几何特征包括轮廓面积、轮廓周长、轮廓矩和轮廓质心。
5.根据权利要求1所述一种重叠颗粒物的分离和轮廓重建方法,其特征在于,所述基于几何特征设立判断因子对提取轮廓进行筛选,得到重叠颗粒物轮廓这一步骤,其判断因子的数学表达式如下:
6.根据权利要求1所述一种重叠颗粒物的分离和轮廓重建方法,其特征在于,所述对重叠颗粒物轮廓进行凸包检测,得到重叠颗粒物凸缺陷这一步骤,其具体包括:
7.根据权利要求1所述一种重叠颗粒物的分离和轮廓重建方法,其特征在于,所述对重叠颗粒物凸缺陷进行分割点对匹配,得到残缺的颗粒物轮廓这一步骤,其具体包括:
8.根据权利要求7所述一种重叠颗粒物的分离和轮廓重建方法,其特征在于,所述角平分线匹配算法,其数学表达式如下:
9.根据权利要求1所述一种重叠颗粒物的分离和轮廓重建方法,其特征在于,所述对残缺的颗粒物轮廓进行拟合重建,得到颗粒物重建轮廓这一步骤,其拟合表达式如下:
10.一种重叠颗粒物的分离和轮廓重建系统,其特征在于,包括:
技术总结
本发明公开了一种重叠颗粒物的分离和轮廓重建方法及系统,该方法包括:对图片进行背景分离;然后对目标颗粒物进行轮廓跟踪提取,利用提取轮廓计算几何特征;接着根据几何特征筛对提取轮廓进行筛选,对筛选轮廓进行凸包检测,得到重叠颗粒物凸缺陷;最后对重叠颗粒物凸缺陷进行分割点对匹配和轮廓拟合重建,得到颗粒物重建轮廓。该系统包括:预处理模块、轮廓提取模块、几何计算模块、轮廓筛选模块、凸包检测模块、匹配模块和拟合重建模块。通过使用本发明,能够将重叠颗粒物从所有颗粒物中筛选出来并且较好地分离,还可以对残缺地轮廓进行较好较精确的拟合,最终实现计数。本发明可广泛应用于数字图像处理技术领域。
技术研发人员:王佳琪,邓铮渝,王弋航
受保护的技术使用者:中山大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!