车道线地图生成方法、装置、电子装置和存储介质与流程
本申请涉及辅助驾驶,特别是涉及一种车道线地图生成方法、装置、电子装置和存储介质。
背景技术:
1、车道线地图能够为智能辅助驾驶领域提供重要的先验信息,例如,能够为智能驾驶车辆的实时定位以及运动规划提供依据,因此,车道线地图的生成引起了相关领域学者的大量关注。
2、目前的车道线地图大都是基于激光雷达产生的点云数据并结合人工标注的方式生成的,工作量巨大,而且激光雷达传感器本身价格昂贵,并且,激光雷达强度信息容易受积水、车道线材质和磨损程度的影响,导致地图的完整度低。并且,在基于视觉空间的图像信息生成车道线地图方面,目前还没有提出有效的解决方案。
3、如何利用视觉空间的图像信息生成车道线地图,是一个需要解决的问题。
技术实现思路
1、在本实施例中提供了一种车道线地图生成方法、装置、电子装置和存储介质,以解决相关技术中如何利用视觉空间的图像信息生成车道线地图的问题。
2、第一个方面,在本实施例中提供了一种车道线地图生成方法,包括:
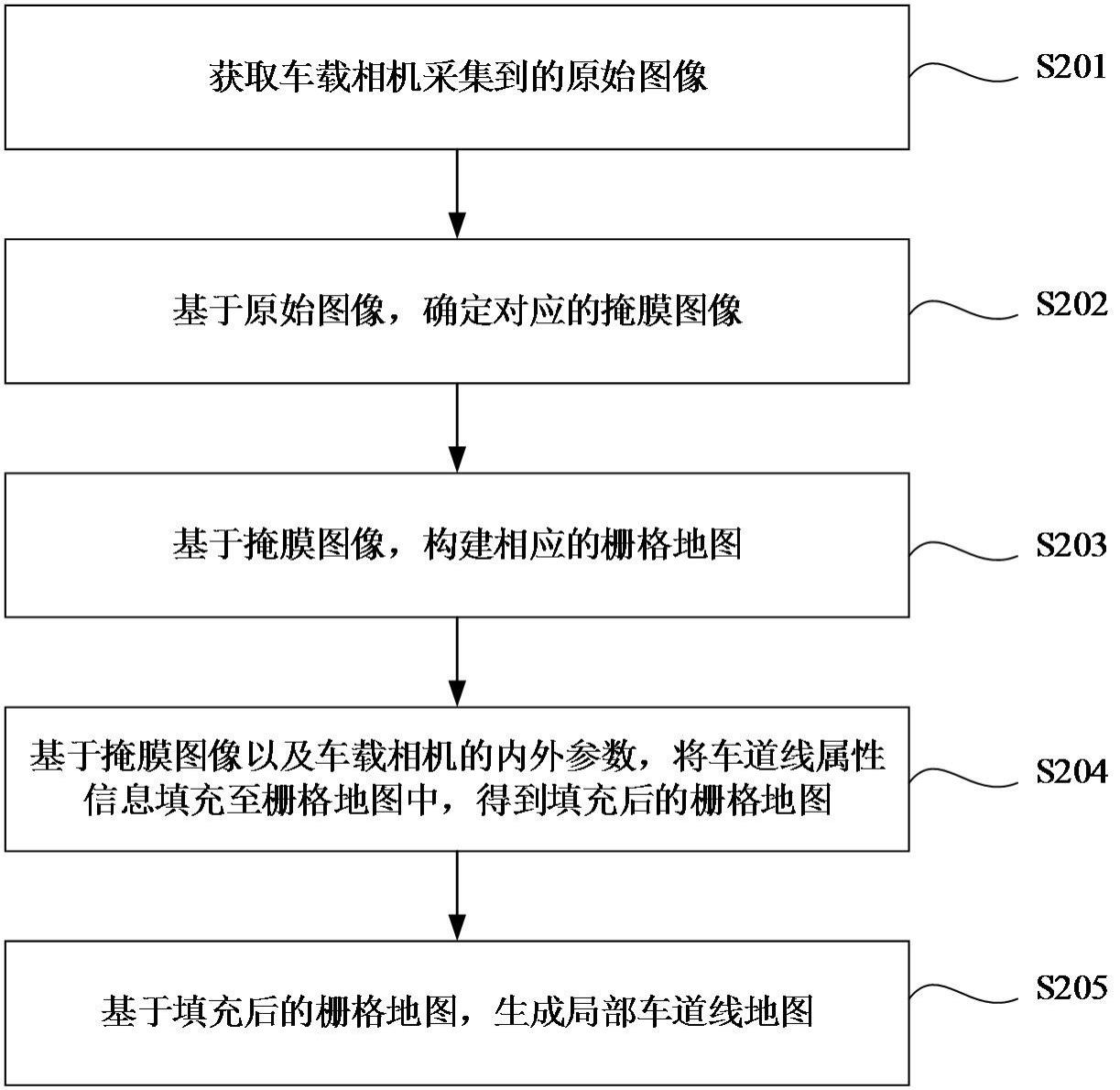
3、获取车载相机采集到的原始图像;
4、基于所述原始图像,确定对应的掩膜图像,所述掩膜图像中包括车道线属性信息;
5、基于所述掩膜图像,构建相应的栅格地图;
6、基于所述掩膜图像以及所述车载相机的内外参数,将所述车道线属性信息填充至所述栅格地图中,得到填充后的栅格地图;
7、基于所述填充后的栅格地图,生成局部车道线地图。
8、在其中的一些实施例中,所述基于所述掩膜图像,构建相应的栅格地图,包括:
9、获取所述车载相机的内外参数;
10、基于所述车载相机的内外参数将所述掩膜图像转换为所述栅格地图。
11、在其中的一些实施例中,所述基于所述掩膜图像以及所述车载相机的内外参数,将所述车道线属性信息填充至所述栅格地图中,得到填充后的栅格地图,包括:
12、基于所述车载相机的内外参数,将所述栅格地图投影至所述车载相机的成像平面,得到无畸变地图;
13、获取所述车载相机中无畸变图像与畸变图像之间的映射关系;
14、基于所述无畸变地图以及所述映射关系,得到所述栅格地图对应的畸变地图;
15、基于所述掩膜图像以及所述畸变地图,将所述车道线属性信息填充至所述栅格地图中,得到填充后的栅格地图。
16、在其中的一些实施例中,所述车道线属性信息包括多个属性类别,在所述基于所述填充后的栅格地图,生成局部车道线地图之后,所述方法还包括:
17、获取所述车载相机在不同位姿下对应的多个局部车道线地图;
18、基于多个所述局部车道线条地图,确定初始全局车道线地图;
19、确定目标栅格的观测总次数,以及所述目标栅格每次观测对应的属性类别,所述目标栅格为所述初始全局车道线地图中的任一栅格;
20、基于所述目标栅格在每一属性类别中的属性观测次数、所述观测总次数以及预设阈值,确定所述目标栅格的目标属性类别;
21、基于所述初始全局车道线地图中所有栅格的目标属性类别,生成目标全局车道线地图。
22、在其中的一些实施例中,所述基于所述目标栅格在每一属性类别中的属性观测次数、所述观测总次数以及预设阈值,确定所述目标栅格的目标属性类别,包括:
23、基于所述目标栅格在每一属性类别的属性观测次数以及所述观测总次数,确定所述目标栅格在每一属性类别对应的类别概率;
24、基于各类别概率以及所述预设阈值,确定所述目标栅格的目标属性类别。
25、在其中的一些实施例中,在基于所述初始全局车道线地图中所有栅格的目标属性类别,生成目标全局车道线地图之后,所述方法还包括:
26、获取所述目标全局车道线地图的分布参数;
27、基于所述分布参数、所述目标全局车道线地图中的车道线在每一属性类别中当前的属性观测次数以及所述目标全局车道线地图中的车道线的当前观测总次数,对所述目标全局车道线地图进行更新。
28、在其中的一些实施例中,所述基于所述分布参数、所述目标全局车道线地图中的车道线在每一属性类别中当前的属性观测次数以及所述目标全局车道线地图中的车道线的当前观测总次数,对所述目标全局车道线地图进行更新,包括:
29、所述基于所述分布参数、所述目标全局车道线地图中的车道线在每一属性类别中当前的属性观测次数以及所述目标全局车道线地图中的车道线的当前观测总次数,确定所述目标全局车道线地图当前的概率分布函数;
30、基于所述当前的概率分布函数,对所述目标全局车道线地图进行更新。
31、第二个方面,在本实施例中提供了一种车道线地图生成装置,包括:
32、获取模块,用于获取车载相机采集到的原始图像;
33、确定模块,用于基于所述原始图像,确定对应的掩膜图像,所述掩膜图像中包括车道线属性信息;
34、构建模块,用于基于所述掩膜图像,构建相应的栅格地图;
35、填充模块,用于基于所述掩膜图像以及所述车载相机的内外参数,将所述车道线属性信息填充至所述栅格地图中,得到填充后的栅格地图;
36、生成模块,用于基于所述填充后的栅格地图,生成局部车道线地图。
37、第三个方面,在本实施例中提供了一种电子装置,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一个方面以及第一方面任一实施例所述的车道线地图生成方法。
38、第四个方面,在本实施例中提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一个方面以及第一方面任一实施例所述的车道线地图生成方法。
39、与相关技术相比,在本实施例中提供的车道线地图生成方法,通过车载相机采集的原始图像确定对应的掩膜图像,其中,掩膜图像包括车道线的属性信息,进一步地,根据掩膜图像构建对应的栅格地图,并根据掩膜图像以及车载相机的内外参数,将掩膜图像中的车道线属性信息填充至对应的栅格地图中,得到填充后的栅格地图,从而使填充后的栅格地图中包括车道线的属性信息,进一步地,根据填充后的栅格地图生成局部车道线地图,从而通过车载相机采集的视觉空间的图像信息生成了车道线地图,避免了由于天气、车道线材质以及其他因素对激光雷达的影响,导致生成的车道线地图的完整度低的问题,通过本申请提供的根据视觉空间的图像信息生成的车道线地图,算法逻辑简单清晰,能够为智能驾驶车辆的实时定位以及运动规划提供准确的先验信息。
40、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:
1.一种车道线地图生成方法,其特征在于,包括:
2.根据权利要求1所述的车道线地图生成方法,其特征在于,所述基于所述掩膜图像,构建相应的栅格地图,包括:
3.根据权利要求1所述的车道线地图生成方法,其特征在于,所述基于所述掩膜图像以及所述车载相机的内外参数,将所述车道线属性信息填充至所述栅格地图中,得到填充后的栅格地图,包括:
4.根据权利要求1所述的车道线地图生成方法,其特征在于,所述车道线属性信息包括多个属性类别,在所述基于所述填充后的栅格地图,生成局部车道线地图之后,所述方法还包括:
5.根据权利要求4所述的车道线地图生成方法,其特征在于,所述基于所述目标栅格在每一属性类别中的属性观测次数、所述观测总次数以及预设阈值,确定所述目标栅格的目标属性类别,包括:
6.根据权利要求4所述的车道线地图生成方法,其特征在于,在基于所述初始全局车道线地图中所有栅格的目标属性类别,生成目标全局车道线地图之后,所述方法还包括:
7.根据权利要求6所述的车道线地图生成方法,其特征在于,所述基于所述分布参数、所述目标全局车道线地图中的车道线在每一属性类别中当前的属性观测次数以及所述目标全局车道线地图中的车道线的当前观测总次数,对所述目标全局车道线地图进行更新,包括:
8.一种车道线地图生成装置,其特征在于,包括:
9.一种电子装置,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行权利要求1至权利要求7中任一项所述的车道线地图生成方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至权利要求7中任一项所述的车道线地图生成方法的步骤。
技术总结
本申请涉及一种车道线地图生成方法、装置、电子装置和存储介质,其中,该车道线地图生成方法包括:获取车载相机采集到的原始图像;基于原始图像,确定对应的掩膜图像,掩膜图像中包括车道线属性信息;基于掩膜图像,构建相应的栅格地图;基于掩膜图像以及车载相机的内外参数,将车道线属性信息填充至栅格地图中,得到填充后的栅格地图;基于填充后的栅格地图,生成局部车道线地图。通过本申请,解决了现有技术中无法通过视觉空间的图像信息生成车道线地图的问题,实现了根据视觉空间的图像信息生成了车道线地图。
技术研发人员:高海明,华炜,邱奇波,张霄来,张骞
受保护的技术使用者:之江实验室
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!