基于深度玻尔兹曼机聚类的图像识别方法及系统
本发明涉及图像识别,特别涉及基于深度玻尔兹曼机聚类的图像识别方法及系统。
背景技术:
1、目前,人们每天都面临着大量的图片数据进行识别和处理。图像识别过程分别包括图像预处理、图像分割、特征提取和判断匹配。借助图像识别技术,人类快速搜索更多的图像信息,同时产生一种新的对外部世界的认识,促进人工智能的快速发展。聚类算法是一种无监督的机器自学习方法,是将相似度高的图像进行自动聚类。在过去的几十年里,各种聚类算法的提出和改进,大大促进了聚类算法的发展。然而,随着图像数据的数据量以及图像数据的维度的增加,传统的聚类算法只是将高维数据映射到低维空间,处理高维度的图像数据的效率低下,且由于容量不足,不能充分捕捉和挖掘图像数据的非线性性质。因此,传统的聚类算法对于高维数据集很难达到理想的聚类效果。例如,谱聚类算法对于高维数据集,会需要很高的内存计算消耗,在实际的大数据集聚类中不适用。而通常情况下,深度图像识别模型是将嵌入表示和聚类分开进行的,即嵌入表示与聚类的联系并不紧密。如果没有对聚类进行优化,这种方法得到的嵌入表示不一定适合聚类。
2、图像识别可以用于监控设备对人脸的识别。人们在购买商品的时候,由于图像识别出客户类型的边界不清晰,不能根据客户的最大满意度向客户推荐所需的商品,从而增加了客户的商品选择时间。
3、现有技术cn108960275a提供了一种基于深度玻尔兹曼机的图像识别方法,通过构建带有标签的手写体数字图片作为样本集对深度玻尔兹曼机进行训练,将训练好的神经网络保存,将待识别图片作为输入,根据输出向量得到识别结果。通过深度波尔兹曼机识别手写数字图像,避免了人工的特征提取过程。但是,其只是通过机器学习对图像特征提取,并没有对深度玻尔兹曼机的初始类别标签进行具体设定或聚类,从而影响了对图像识别效果。
技术实现思路
1、本发明目的之一在于提供了基于深度玻尔兹曼机聚类的图像识别方法,基于深度玻尔兹曼机构建图像识别模型并通过k-means算法对训练的图像数据初始类别标签进行聚类并修正,使得类别标签更加明确,,从而提升图像聚类效果,进一步提升最终的图像识别能力。本发明目的之一还在于提供了基于深度玻尔兹曼机聚类的图像识别系统和应用。
2、本发明提供了一种基于深度玻尔兹曼机聚类的图像识别方法,包括:
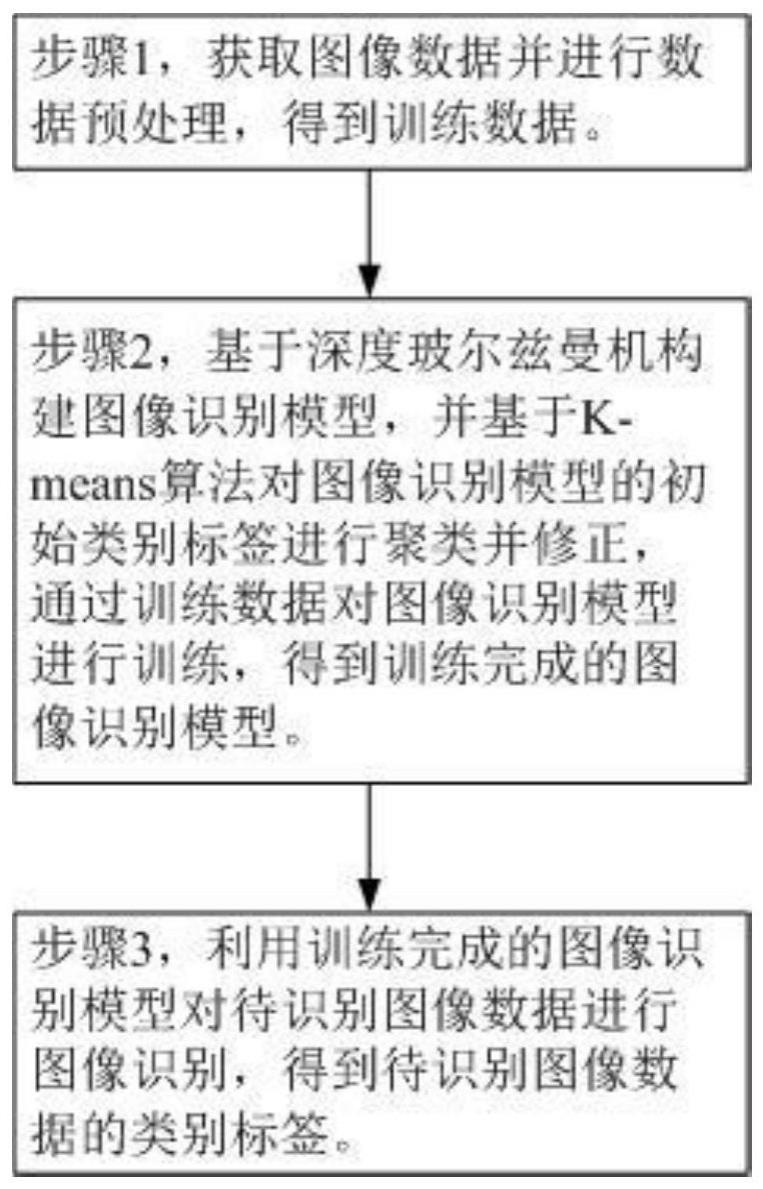
3、获取图像数据并进行数据预处理,得到训练数据;
4、基于深度玻尔兹曼机,构建图像识别模型,并基于k-means算法对图像识别模型的初始类别标签进行聚类并修正,通过训练数据对图像识别模型进行训练,得到训练完成的图像识别模型;
5、利用训练完成的图像识别模型对待识别物品进行图像识别,得到待识别物品的对应类别标签。
6、优选地,基于深度玻尔兹曼机,构建图像识别模型,并基于k-means算法对图像识别模型的初始类别标签进行聚类并修正,通过训练数据对图像识别模型进行训练,得到训练完成的图像识别模型,包括:
7、基于深度玻尔兹曼机构建图像识别模型;
8、将训练数据输入到图像识别模型中进行预训练,得到n维度的初始类别标签;
9、基于k-means算法对初始类别标签进行聚类,得到k个初始化聚类簇;
10、根据初始化聚类簇结合初始类别标签,基于反向传播算法通过kl散度损失函数对图像识别模型的网络参数进行微调,得到修正类别标签;
11、将训练数据输入到图像识别模型中进行训练,得到训练完成的图像识别模型。
12、优选地,基于k-means算法对初始类别标签进行聚类,得到k个初始化聚类簇;包括:
13、确定簇中心的个数k;
14、随机选择k个训练数据作为簇中心并计算所有训练数据与k个簇中心的距离;
15、对于每一个训练数据与k个簇中心的距离,将每一个训练数据划分到与其距离最近的簇中心,得到k个聚类簇;
16、计算聚类簇内的某个训练数与到聚类簇内的其他训练数据之间的距离,选择距离最小的训练数据作为新的簇中心,并对簇中心进行更新;
17、重新计算对于每一个训练数据与k个簇中心的距离,将每一个训练数据划分到与其距离最近的簇中心,得到k个聚类簇和计算聚类簇内的某个训练数与到聚类簇内的其他训练数据之间的距离,选择距离最小的训练数据作为新的簇中心,并对簇中心进行更新,直到簇中心不再发生变动;
18、输出k个初始化聚类簇。
19、优选地,图像识别模型包括:
20、一个输入层和两个隐藏层,其中,
21、一个输入层与其中一个隐藏层相连接,其中一个隐藏层与另一个隐藏层相连接;
22、图像识别模型可以自下而上的传输和自上而下的反馈。
23、本发明还提供了一种基于深度玻尔兹曼机聚类的图像识别系统,包括:
24、数据获取模块,用于获取物品的图像数据并进行数据预处理,得到训练数据;
25、模型构建模块,用于基于深度玻尔兹曼机,构建图像识别模型,并基于k-means算法对图像识别模型的初始类别标签进行聚类并修正,通过训练数据对图像识别模型进行训练,得到训练完成的图像识别模型;
26、图像识别模块,用于利用训练完成的图像识别模型对待识别物品进行图像识别,得到待识别物品的对应类别标签。
27、优选地,模型构建模块包括:
28、构建模型单元,用于基于深度玻尔兹曼机构建图像识别模型;
29、预训练单元,用于将训练数据输入到图像识别模型中进行预训练,得到n维度的初始类别标签;
30、聚类单元,用于基于k-means算法对初始类别标签进行聚类,得到k个初始化聚类簇;
31、参数微调单元,用于根据初始化聚类簇结合初始类别标签,基于反向传播算法通过kl散度损失函数对图像识别模型的网络参数进行微调,得到修正类别标签;
32、数据训练单元,用于将训练数据输入到图像识别模型中进行训练,得到训练完成的图像识别模型。
33、本发明还提供了一种基于深度玻尔兹曼机聚类的图像识别方法/系统的应用,其特征在于,包括:
34、获取物品的图像数据并进行数据预处理,得到训练数据;
35、基于深度玻尔兹曼机,构建图像识别模型,并基于k-means算法对图像识别模型的初始类别标签进行聚类并修正,通过训练数据对物品图像识别模型进行训练,得到训练完成的物品图像识别模型;
36、利用训练完成的物品图像识别模型对待识别物品进行图像识别,得到待识别物品的对应类别标签。
37、优选地,利用训练完成的物品图像识别模型对待识别物品进行图像识别,得到待识别物品的对应类别标签,包括:
38、利用多个摄影机对待识别物品采集多个待识别图像;
39、多个待识别图像进行融合,得到融合图像;
40、对融合图像进行数据预处理,得到数据预处理后的融合图像;
41、将数据预处理后的融合图像输入到训练完成的物品图像识别模型,得到待识别物品对应的物品类别标签。
42、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
43、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!