虚车道线跟踪渲染方法、装置、设备及存储介质与流程
本发明涉及自动驾驶,尤其涉及一种虚车道线跟踪渲染方法、装置、设备及存储介质。
背景技术:
1、自动驾驶系统中,车道线作为一类很重要的感知元素,不仅在行为决策中起着重要作用,同时作为主要的显示元素在用户交互层面也起着主导作用。目前大部分感知系统在识别及输出车道线的时候,每条车道线是通过在车道线上的一系列点来表示,同时,学习到的车道线属性(如虚线/实线等)在发送的时候一并发送给下游使用。对于实车道线在可视化的时候直接进行渲染是没有问题的,但是对于虚线,由于车道线上一系列的点每次发送给下游的时候不能保证一致性,在可视化渲染的时候容易出现虚车道线流动的现象,不符合真实情况。而且,如果用户盯着流动的虚车道线容易产生眩晕问题,严重情况下会造成安全事故问题。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种虚车道线跟踪渲染方法、装置、设备及存储介质,旨在解决现有技术中虚车道线在可视化渲染时容易出现流动现象,容易造成用户眩晕,影响驾驶安全的技术问题。
2、为实现上述目的,本发明提供了一种虚车道线跟踪渲染方法,所述方法包括以下步骤:
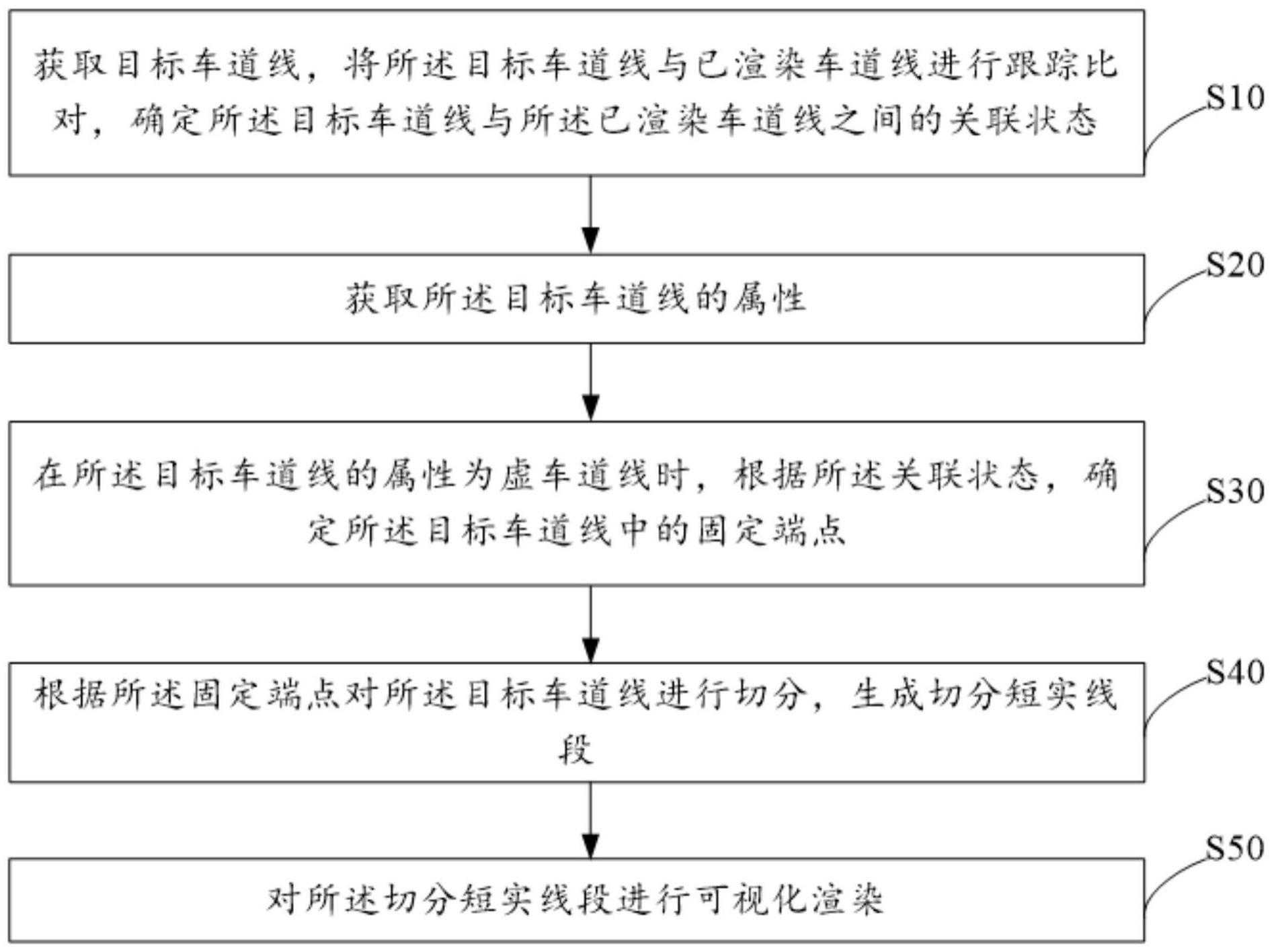
3、获取目标车道线,将所述目标车道线与已渲染车道线进行跟踪比对,确定所述目标车道线与所述已渲染车道线之间的关联状态;
4、获取所述目标车道线的属性;
5、在所述目标车道线的属性为虚车道线时,根据所述关联状态,确定所述目标车道线中的固定端点;
6、根据所述固定端点对所述目标车道线进行切分,生成切分短实线段;
7、对所述切分短实线段进行可视化渲染。
8、可选地,所述根据所述关联状态,确定所述目标车道线中的固定端点,包括:
9、在所述关联状态为无关联时,获取所述目标车道线两端的端点以及各所述端点对应的端点位置;
10、根据所述端点位置,确定所述端点是否分别位于车辆前方范围与车辆后方范围;
11、在所述端点分别位于车辆前方范围与车辆后方范围时,将位于所述车辆后方范围的端点作为所述固定端点。
12、可选地,所述根据所述端点位置,确定所述端点是否分别位于车辆前方范围与车辆后方范围之后,还包括:
13、在所述端点未分别位于车辆前方范围与车辆后方范围时,将所述端点中符合预设接近条件的端点作为所述固定端点。
14、可选地,所述根据所述固定端点对所述目标车道线进行切分,生成切分短实线段,包括:
15、根据预设需求,确定当前切分间隔;
16、根据所述固定端点与所述当前切分间隔对所述目标车道线进行切分,生成切分短实线段。
17、可选地,所述根据所述关联状态,确定所述目标车道线中的固定端点,包括:
18、在所述关联状态为有关联时,获取所述目标车道线对应的已知切分短实线段;
19、根据所述已知切分短实线段的端点,在所述目标车道线中确定匹配端点作为所述固定端点。
20、可选地,所述根据所述固定端点对所述目标车道线进行切分,生成切分短实线段,包括:
21、根据所述固定端点对所述目标车道线进行切分,确定第一切分短实线段与当前切分间隔;
22、根据所述第一切分短实线段,确定剩余车道线;
23、根据所述当前切分间隔与所述固定端点,对所述剩余车道线进行切分扩展,得到第二切分短实线段;
24、将所述第一切分短实线段与所述第二切分短实线段作为所述切分短实线段。
25、可选地,所述获取所述目标车道线的属性之后,还包括:
26、在所述目标车道线的属性为混合车道线时,获取所述目标车道线中的实车道线与虚车道线;
27、对所述实车道线进行可视化渲染;
28、将所述虚车道线作为所述目标车道线,返回执行根据所述关联状态,确定所述目标车道线中的固定端点的步骤。
29、此外,为实现上述目的,本发明还提出一种虚车道线跟踪渲染装置,所述虚车道线跟踪渲染装置包括:
30、获取模块,用于获取目标车道线,将所述目标车道线与已渲染车道线进行跟踪比对,确定所述目标车道线与所述已渲染车道线之间的关联状态;
31、所述获取模块,还用于获取所述目标车道线的属性;
32、切分模块,用于在所述目标车道线的属性为虚车道线时,根据所述关联状态,确定所述目标车道线中的固定端点;
33、所述切分模块,还用于根据所述固定端点对所述目标车道线进行切分,生成切分短实线段;
34、渲染模块,用于对所述切分短实线段进行可视化渲染。
35、此外,为实现上述目的,本发明还提出一种虚车道线跟踪渲染设备,所述虚车道线跟踪渲染设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的虚车道线跟踪渲染程序,所述虚车道线跟踪渲染程序配置为实现如上文所述的虚车道线跟踪渲染方法的步骤。
36、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有虚车道线跟踪渲染程序,所述虚车道线跟踪渲染程序被处理器执行时实现如上文所述的虚车道线跟踪渲染方法的步骤。
37、在本发明中,通过获取目标车道线,将所述目标车道线与已渲染车道线进行跟踪比对,确定所述目标车道线与所述已渲染车道线之间的关联状态,获取所述目标车道线的属性,在所述目标车道线的属性为虚车道线时,根据所述关联状态,确定所述目标车道线中的固定端点,根据所述固定端点对所述目标车道线进行切分,生成切分短实线段,对所述切分短实线段进行可视化渲染。相较于直接对虚车道线进行可视化渲染,容易出现流动现象,本发明将虚车道线切分成一段段短实线段,并通过设置固定端点保证每条短实线段在连续帧上的改变最小,能够有效解决渲染时虚车道线生成点不一致导致的流动问题,能够更好地服务可视化渲染,减少潜在安全风险,提高驾驶安全。
技术特征:
1.一种虚车道线跟踪渲染方法,其特征在于,所述虚车道线跟踪渲染方法,包括:
2.如权利要求1所述的方法,其特征在于,所述根据所述关联状态,确定所述目标车道线中的固定端点,包括:
3.如权利要求2所述的方法,其特征在于,所述根据所述端点位置,确定所述端点是否分别位于车辆前方范围与车辆后方范围之后,还包括:
4.如权利要求2或3所述的方法,其特征在于,所述根据所述固定端点对所述目标车道线进行切分,生成切分短实线段,包括:
5.如权利要求1所述的方法,其特征在于,所述根据所述关联状态,确定所述目标车道线中的固定端点,包括:
6.如权利要求5所述的方法,其特征在于,所述根据所述固定端点对所述目标车道线进行切分,生成切分短实线段,包括:
7.如权利要求1所述的方法,其特征在于,所述获取所述目标车道线的属性之后,还包括:
8.一种虚车道线跟踪渲染装置,其特征在于,所述虚车道线跟踪渲染装置包括:
9.一种虚车道线跟踪渲染设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的虚车道线跟踪渲染程序,所述虚车道线跟踪渲染程序配置为实现如权利要求1至7中任一项所述的虚车道线跟踪渲染方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有虚车道线跟踪渲染程序,所述虚车道线跟踪渲染程序被处理器执行时实现如权利要求1至7任一项所述的虚车道线跟踪渲染方法的步骤。
技术总结
本发明属于自动驾驶技术领域,公开了一种虚车道线跟踪渲染方法、装置、设备及存储介质。该方法包括:获取目标车道线,将所述目标车道线与已渲染车道线进行跟踪比对,确定所述目标车道线与已渲染车道线之间的关联状态;获取所述目标车道线的属性;在所述目标车道线的属性为虚车道线时,根据所述关联状态,确定所述目标车道线中的固定端点;根据所述固定端点对所述目标车道线进行切分,生成切分短实线段;对所述切分短实线段进行可视化渲染。通过上述方式,将虚车道线切分成若干短实线段,并保证每条短实线段在连续帧上的改变最小,有效解决渲染时虚车道线生成点不一致导致的流动问题,能更好地服务可视化渲染,减少潜在安全风险,提高驾驶安全。
技术研发人员:范云凤,卢留培,张肖,张鹏越,刘兰个川,崔留争
受保护的技术使用者:广州小鹏自动驾驶科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!