一种基于高精地图的数字孪生模型自动生成方法及系统与流程
本发明属于地图数据处理,具体涉及一种基于高精地图的数字孪生模型自动生成方法及系统。
背景技术:
1、数字孪生是一个仿真的过程,在虚拟空间中映射出现实的概念,可以被视为一个或多个重要的、彼此依赖的装备系统的数字映射系统。而现有的道路构建路网存在以下不足:1、现有技术大多使用osm数据或shp数据构建路网。2、osm数据和shp数据为传统路网数据,数据精度可以达到某条路。采用线的方式表达某条道路,缺乏道路的宽度以及车道信息。其中的经纬度数据也与真实世界存在一定的偏差,缺乏人工测绘的过程,无法保证数据的微观准确性。为此,我们提出了一种基于高精地图的数字孪生模型自动生成方法及系统。
技术实现思路
1、本发明的目的是为了解决现有技术中存在构建路网的精度低,缺乏道路的宽度以及车道等信息的缺点,而提出的一种基于高精地图的数字孪生模型自动生成方法。
2、为了实现上述目的,本发明采用了如下技术方案:
3、设计一种基于高精地图的数字孪生模型自动生成方法,包括如下步骤:
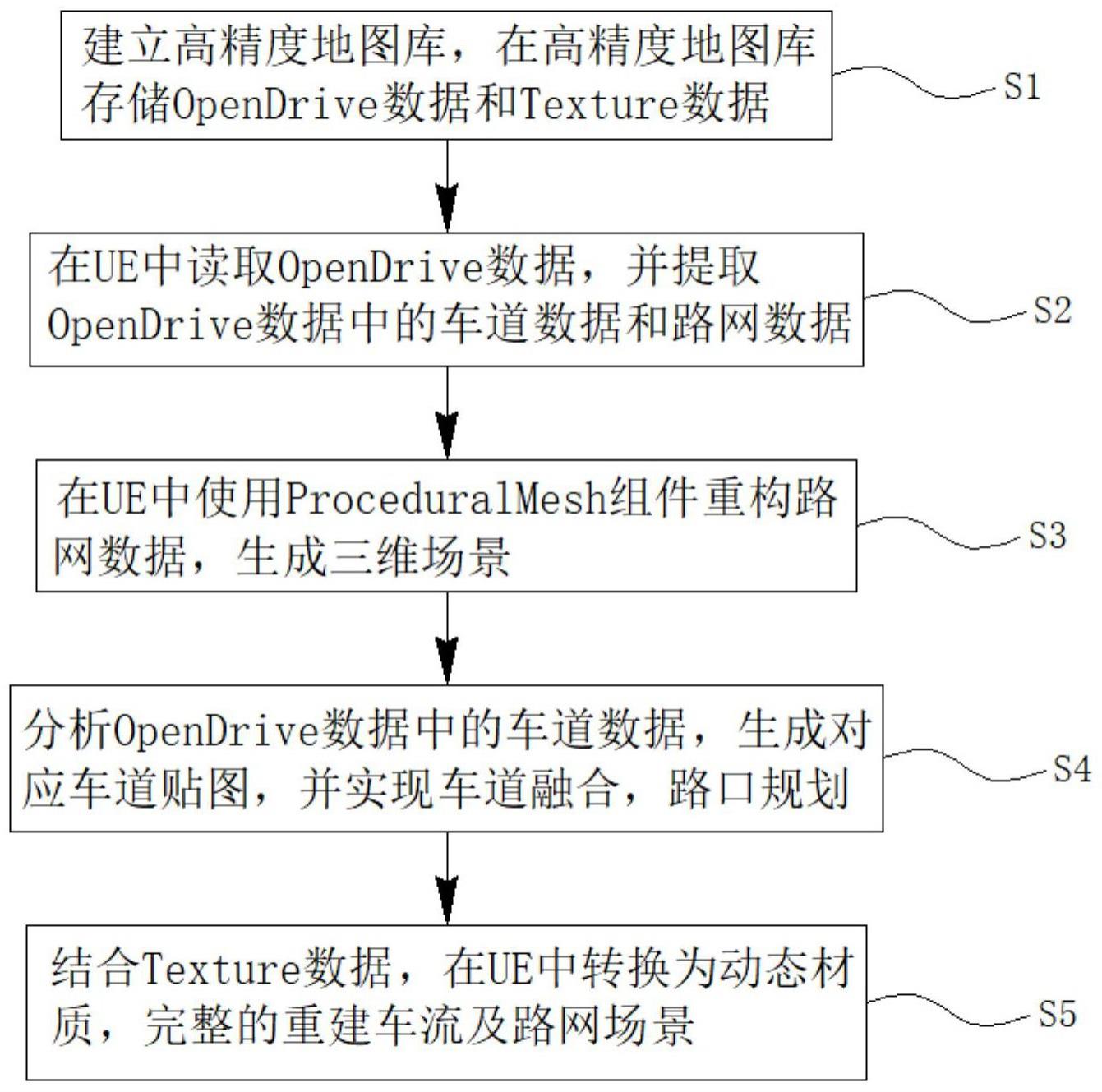
4、步骤1、建立高精度地图库,在高精度地图库存储opendrive数据和texture数据。
5、步骤2、在ue中读取opendrive数据,并提取opendrive数据中的车道数据和路网数据。
6、步骤3、在ue中使用proceduralmesh组件重构路网数据,生成三维场景。
7、步骤4、分析opendrive数据中的车道数据,生成对应车道贴图,并实现车道融合,路口规划。
8、步骤5、结合texture数据,在ue中转换为动态材质,完整的重建车流及路网场景。
9、为了解决上述技术问题,本发明还提供了一种基于高精地图的数字孪生模型自动生成的系统,包括:
10、高精度地图库,用于存储opendrive数据和texture数据。
11、读取模块,用于在ue中读取opendrive数据,并提取其中的车道数据和路网数据。
12、重构路网数据模块,用于在ue中使用proceduralmesh组件重构路网数据,生成三维场景。
13、车道贴图生产模块,用于分析opendrive数据中的车道数据,生成对应车道贴图,并实现车道融合,路口规划。
14、重建车流及路网场景模块,用于结合texture数据,在ue中转换为动态材质,完整的重建车流及路网场景。
15、标志信息分析模块,用于解析opendrive数据中的标志信息,根据gb/t 30699-2014标准对标志信息进行解析。
16、本发明提出的一种基于高精地图的数字孪生模型自动生成方法及系统,有益效果在于:
17、一、对交通相关的数字孪生业务具有重要意义
18、(1)、本发明可大大减少了传统交通类数字孪生项目中,三维场景构建时繁杂的工作内容。
19、(2)、本发明推进了高速公路数字管控、隧道管控、城市交通管控等实际业务场景的发展历程。
20、(3)、本发明解决了传统路网场景中精度不足、车道信息缺失、与现实不符的致命问题。
21、二、对交通预测、交通流模拟、城市道路规划等交通类城市大脑类业务具有重要意义。
22、(1)、本发明可以对接sumo仿真软件中的实时数据进行车流模拟,将车流状况可视化。
23、(2)、本发明同时结合sumo中的仿真数据,可以实现城市交通拥堵状况预测、交通事故预测、道路规划等城市大脑实行方案。
技术特征:
1.一种基于高精地图的数字孪生模型自动生成方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于高精地图的数字孪生模型自动生成方法,其特征在于,步骤s3中,在ue中形成双层结构的空间层,第一空间层和第二空间层,第一空间层位于第二空间层的下方,在第一空间层内形成二维结构的平面地图,在第二空间层上重构路网数据,沿路线生成所述三维场景。
3.根据权利要求2所述的一种基于高精地图的数字孪生模型自动生成方法,其特征在于,所述第一层为二维结构的平面地图为数字线划地图。
4.根据权利要求3所述的一种基于高精地图的数字孪生模型自动生成方法,其特征在于,第二空间层中生成的路网与第一空间层内的平面地图的路网相互对应重叠。
5.根据权利要求4所述的一种基于高精地图的数字孪生模型自动生成方法,其特征在于,沿路线生成三维场景的具体步骤如下:
6.根据权利要求5所述的一种基于高精地图的数字孪生模型自动生成方法,其特征在于,所述第一空间层内的平面地图与第二空间层内三维场景融为一体结构。
7.根据权利要求1所述的一种基于高精地图的数字孪生模型自动生成方法,其特征在于,在s4中,分析opendrive数据中的车道数据包括标志信息,所述标志信息根据gb/t30699-2014标准对标志信息进行解析。
8.一种基于高精地图的数字孪生模型自动生成的系统,用于权利要求1-7任一项所述的基于高精地图的数字孪生模型自动生成方法,其特征在于,包括:
技术总结
本发明公开了一种基于高精地图的数字孪生模型自动生成方法,涉及地图数据处理技术领域,包括如下步骤:建立高精度地图库,在高精度地图库存储OpenDrive数据和Texture数据;在UE中读取OpenDrive数据,并提取OpenDrive数据中的车道数据和路网数据;在UE中使用ProceduralMesh组件重构路网数据,生成三维场景;分析OpenDrive数据中的车道数据,生成对应车道贴图,并实现车道融合,路口规划;结合Texture数据,在UE中转换为动态材质,完整的重建车流及路网场景。本发明可大大减少了传统交通类数字孪生项目中,三维场景构建时繁杂的工作内容,可解决了传统路网场景中精度不足、车道信息缺失、与现实不符的致命问题,可推进了高速公路数字管控、隧道管控、城市交通管控等实际业务场景的发展历程。
技术研发人员:陈锋,王加义,邓牧涵
受保护的技术使用者:浙江高信技术股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!