一种多传感器协同目标跟踪方法、系统、设备及介质
本发明涉及目标跟踪,特别是涉及一种多传感器协同目标跟踪方法、系统、设备及介质。
背景技术:
1、高速机动飞行器同时具备导弹的高速度以及飞机的高机动特性,因此具有极其重要的军用和民用价值。在现代战争中,对机动目标的精确打击和在复杂环境下的高效突防已经成为决定战争成败的决定性因素。相较于常规飞行器,高速机动飞行器由于其高机动、攻击范围广、突防能力强、飞行环境复杂等一系列特性,使得其成为一种兼具精确打击和强大突防能力的现代化战略武器平台。作为新一代战略武器平台重要组成部分的高速大机动飞行器,由于其具有目标速度与响应时间快、探测困难以及兼具一定的侧向机动能力等特点,成为对国家安全具有重要威胁的武器之一。
2、目前,在基于传感器网络的协同目标跟踪问题研究中,大多数文章中都假设传感器网络中的所有节点均持续正常工作。但是,在实际战场中对高速大机动目标的跟踪中,传感器节点的安全性和稳定性很难得到保证。一方面,在复杂场景中,网络中的部分传感器节点可能会受到物理遮挡、电磁致盲、通信攻击等环境因素的影响;另一方面,传感器节点本身在长时间工作过程中,会产生一定的热疲劳,从而导致功能性下降甚至失效等。在传感器网络中,某个或部分节点出现故障可能会导致整个传感器网络的失效,从而极大地影响协同目标跟踪的精度。在高速机动目标的跟踪过程中,部分传感器节点的失效,更会导致目标状态估计误差激增引起滤波发散,甚至丢失目标等严重情况。因此,研究部分传感器节点失效情况下的协同目标跟踪方法是当前工程领域亟需解决的难题之一。
3、近年来,考虑传感器节点失效的鲁棒协同跟踪技术是当前的一个研究热点,吸引了许多专家学者的关注,但截至目前为止,相关研究成果还比较少,考虑高速大机动目标的鲁棒跟踪方法几乎鲜有人涉足。考虑到传感器网络中常发生随机通信时延、测量信息丢包、随机干扰等故障,夏等人提出了一种分布式鲁棒估计器,用于获取目标精确的状态信息,实现精确目标跟踪。张亚采用一种有限时间矩阵权重一致性策略来对传感器网络中各节点信息进行一致性融合,试图获得更好的一致性估计结果,并成功将其应用到编队合围问题中。maronna r a设计了一套鲁棒估计器来对传感器网络中失效的节点进行实时检测,来保证最终估计结果不受失效节点产生的错误信息的影响。isermann r通过对传感网络中失效节点的精确检测,提出了一种基于残差的反攻击目标跟踪策略。hamid n a和may m p分别提出利用无标签聚类的方法和决策树的方法来对传感器网络中的错误节点进行检测和区分。丁丁等人系统性地阐述了对于信息物理系统的安全估计问题是当前紧要且具有挑战性的任务,并对安全估计问题根据不同的性能指标和防御策略进行总结。bai c z基于信息论通过引入独立于估计器检测机制的一种信息攻击方法,将受到干扰后的测量信息用于卡尔曼滤波过程,分析了攻击传感器网络中正常节点对于分布式状态估计结果的影响。
4、从当前的研究中可以看出,对于基于传感器网络的目标协同跟踪问题,只有很少一部分研究中提到了传感器网络故障的问题,并且截至目前为止,并没有一套系统的考虑传感器网络中某个或者部分节点失效情况下仍然可以对高速机动目标进行持续鲁棒跟踪的方法。
技术实现思路
1、本发明的目的是提供一种多传感器协同目标跟踪方法、系统、设备及介质,以提高协同目标跟踪系统的鲁棒性,实现在部分传感器节点失效的情况下,仍然可以取得持续稳定的目标跟踪效果。
2、为实现上述目的,本发明提供了如下方案:
3、一种多传感器协同目标跟踪方法,包括:
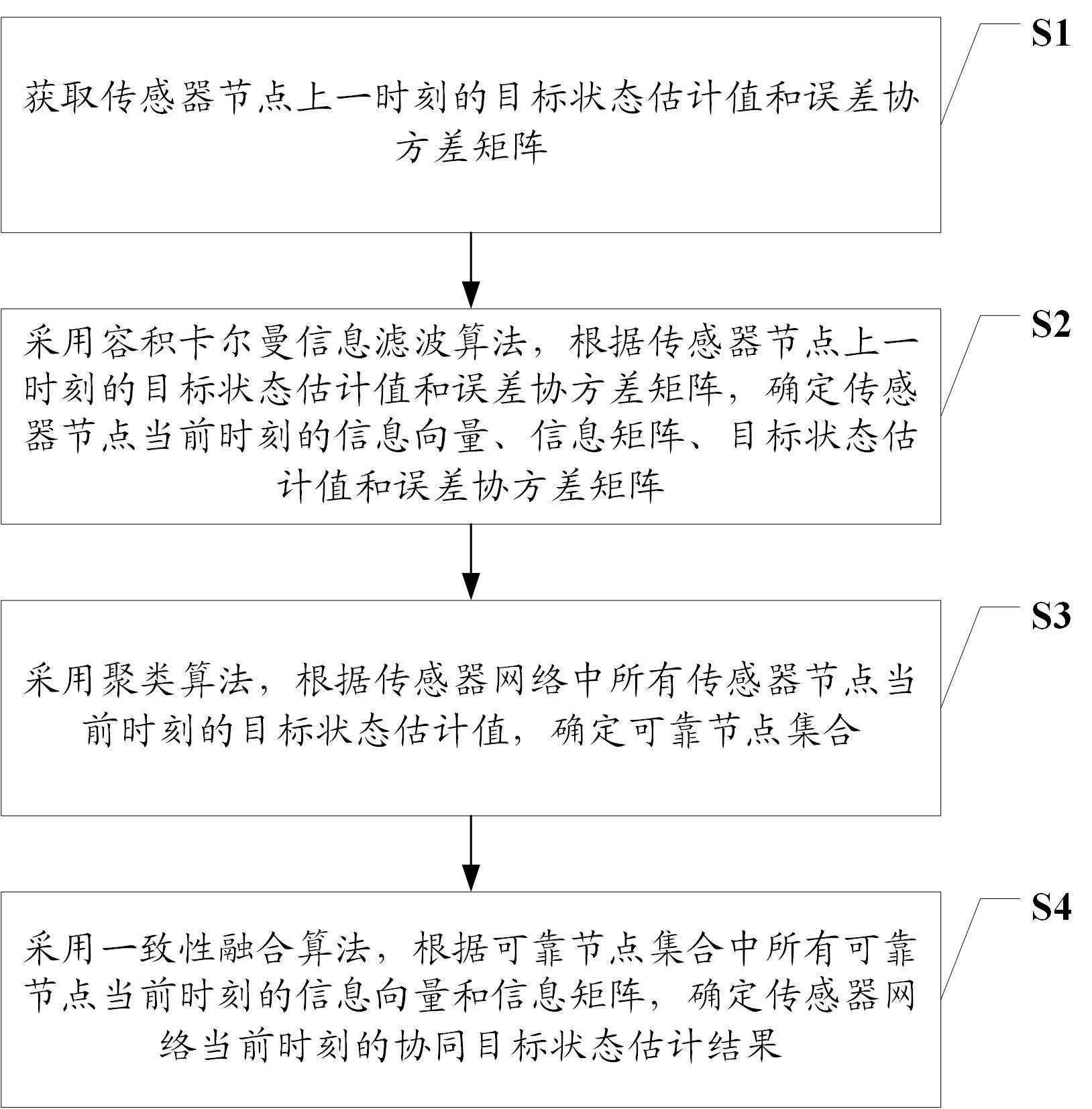
4、获取传感器节点上一时刻的目标状态估计值和误差协方差矩阵;
5、采用容积卡尔曼信息滤波算法,根据传感器节点上一时刻的目标状态估计值和误差协方差矩阵,确定传感器节点当前时刻的信息向量、信息矩阵、目标状态估计值和误差协方差矩阵;其中,传感器节点初始时刻的目标状态估计值和误差协方差矩阵均为预设值;
6、采用聚类算法,根据传感器网络中所有传感器节点当前时刻的目标状态估计值,确定可靠节点集合;所述可靠节点集合表征所述传感器网络中未失效的传感器节点;
7、采用一致性融合算法,根据可靠节点集合中所有可靠节点当前时刻的信息向量和信息矩阵,确定传感器网络当前时刻的协同目标状态估计结果。
8、可选地,采用容积卡尔曼信息滤波算法,根据传感器节点上一时刻的目标状态估计值和误差协方差矩阵,确定传感器节点当前时刻的信息向量、信息矩阵、目标状态估计值和误差协方差矩阵,具体包括:
9、根据传感器节点上一时刻的目标状态估计值和误差协方差矩阵,确定传感器节点上一时刻的目标状态采样值;
10、根据传感器节点上一时刻的目标状态采样值和状态转移方程,确定传感器节点当前时刻的状态预测数据;
11、根据传感器节点当前时刻的状态预测数据,确定传感器节点当前时刻的目标状态预测值和误差协方差预测值;
12、根据传感器节点当前时刻的目标状态预测值和误差协方差预测值,确定传感器节点当前时刻的信息矩阵预测值和信息向量预测值;
13、根据传感器节点上一时刻的目标状态采样值和观测方程,确定传感器节点当前时刻的观测值;
14、根据传感器节点当前时刻的状态预测数据、目标状态预测值和观测值,确定传感器节点当前时刻的伪观测矩阵;
15、根据传感器节点当前时刻的目标状态预测值和伪观测矩阵,确定传感器节点当前时刻的信息贡献矩阵和信息贡献向量;
16、根据传感器节点当前时刻的信息矩阵预测值、信息向量预测值、信息贡献矩阵和信息贡献向量,确定传感器节点当前时刻的信息向量和信息矩阵;
17、根据传感器节点当前时刻的信息向量和信息矩阵,确定传感器节点当前时刻的目标状态估计值和误差协方差矩阵。
18、可选地,采用聚类算法,根据传感器网络中所有传感器节点当前时刻的目标状态估计值,确定可靠节点集合,具体包括:
19、将传感器网络中所有传感器节点当前时刻的目标状态估计值合并为状态集;
20、采用k近邻聚类算法,将所述状态集划分为若干个聚类;所述聚类中的一个样本为一个传感器节点当前时刻的目标状态估计值;
21、根据样本与聚类中心的欧式距离,确定样本权重;
22、根据样本和样本权重,计算各聚类对应的加权中心向量;
23、统计各聚类中样本的个数,并将样本个数最多的一个聚类作为可靠聚类,将所述加权中心向量的最大值作为可靠中心向量;
24、计算所述可靠聚类中的各样本与所述可靠中心向量的欧式距离;
25、将所述可靠聚类中与所述可靠中心向量的欧式距离最小的若干个样本对应的传感器节点作为可靠节点,将所有可靠节点构成的集合作为可靠节点集合。
26、可选地,采用一致性融合算法,根据可靠节点集合中所有可靠节点当前时刻的信息向量和信息矩阵,确定传感器网络当前时刻的协同目标状态估计结果,具体包括:
27、根据可靠节点集合,确定传感器网络当前时刻的通信拓扑;
28、采用一致性融合算法,根据可靠节点集合中所有可靠节点当前时刻的信息向量和信息矩阵以及传感器网络当前时刻的通信拓扑,确定传感器网络当前时刻的融合信息向量和融合信息矩阵;
29、根据传感器网络当前时刻的融合信息向量和融合信息矩阵,确定传感器网络当前时刻的协同目标状态估计结果。
30、可选地,根据传感器节点上一时刻的目标状态估计值和误差协方差矩阵,确定传感器节点上一时刻的目标状态采样值,具体包括:
31、采用cholesky分解方法,对传感器节点上一时刻的误差协方差矩阵进行分解,得到传感器节点上一时刻的误差协方差分解值;
32、采用容积采样规则,根据传感器节点上一时刻的目标状态估计值和误差协方差分解值,确定传感器节点上一时刻的目标状态采样值。
33、可选地,将所述可靠聚类中与所述可靠中心向量的欧式距离最小的若干个样本对应的传感器节点作为可靠节点,将所有可靠节点构成的集合作为可靠节点集合,具体包括:
34、将所述可靠聚类中的各样本与所述可靠中心向量的欧式距离按照从小到大的顺序进行排序,得到欧氏距离序列;
35、对于所述欧式距离序列中的任意两个相邻的欧式距离,若满足前一个欧式距离小于或等于后一个欧式距离的十分之一,则将所述可靠聚类中与所述可靠中心向量的欧式距离小于或等于所述前一个欧式距离的所有样本对应的传感器节点作为可靠节点,将所有可靠节点构成的集合作为可靠节点集合。
36、可选地,根据可靠节点集合,确定传感器网络当前时刻的通信拓扑,具体包括:
37、根据马氏距离对所述可靠节点集合进行通信拓扑重组,得到传感器网络当前时刻的通信拓扑。
38、一种多传感器协同目标跟踪系统,包括:
39、信息获取模块,用于获取传感器节点上一时刻的目标状态估计值和误差协方差矩阵;
40、本地滤波模块,用于采用容积卡尔曼信息滤波算法,根据传感器节点上一时刻的目标状态估计值和误差协方差矩阵,确定传感器节点当前时刻的信息向量、信息矩阵、目标状态估计值和误差协方差矩阵;其中,传感器节点初始时刻的目标状态估计值和误差协方差矩阵均为预设值;
41、聚类筛选模块,用于采用聚类算法,根据传感器网络中所有传感器节点当前时刻的目标状态估计值,确定可靠节点集合;所述可靠节点集合表征所述传感器网络中未失效的传感器节点;
42、信息融合模块,用于采用一致性融合算法,根据可靠节点集合中所有可靠节点当前时刻的信息向量和信息矩阵,确定传感器网络当前时刻的协同目标状态估计结果。
43、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述的多传感器协同目标跟踪方法。
44、一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述的多传感器协同目标跟踪方法。
45、根据本发明提供的具体实施例,本发明公开了以下技术效果:
46、本发明提供的多传感器协同目标跟踪方法,在本地滤波和一致性融合阶段中,采用聚类算法将失效的传感器节点进行滤除,最终对可靠的节点信息进行一致性融合,从而使得协同目标跟踪系统具有对部分传感器节点失效情况下的鲁棒性,在部分传感器节点失效的情况下,仍然可以取得持续稳定目标跟踪效果。
- 还没有人留言评论。精彩留言会获得点赞!