基于图像金字塔和矩形子区的数字图像飞艇蒙皮测量方法
本发明涉及配飞艇蒙皮检测,特别是涉及一种基于图像金字塔和矩形子区的数字图像飞艇蒙皮测量方法。
背景技术:
1、临近空间区域指距离地面20千米到100千米之间的领域,该领域位于普通航空器飞行高度和卫星的轨道运行高度之间。相比于其他飞行器,在临近空间这个良好的领域,开发飞行器将具有重要的军事和民用价值,可以应用于较长时间的定点勘察、环境监测、应急救灾等环境中。平流层飞艇是一种较为常见的临近空间飞行器,能够有效填补航空器和航天器飞行高度间发展的空白,其主要依靠空气浮力悬停在指定高度实现定点驻空。
2、但是临近空间飞行器发展也存在诸多的困难和挑战,因为这个特殊的高度环境,飞行器需要足够的气动升力和环境适应能力。飞艇长时间悬停,阳光辐射导致飞艇内部温度变化,这将造成飞艇内气体的膨胀和收缩。在自身重力和内外界气压变化的情况下,囊体材料容易发生较大的变形,一旦材料发生失效将会导致飞艇发生事故。为此对于蒙皮材料变形进行监测对延长飞艇寿命减少损失显得至关重要。
3、现有技术中往往采用传感器测量进行蒙皮材料变形监测,主要通过电阻应变片实现,虽然电阻应变片测量精度高、技术成熟,但是需要专门布置电路并且容易受到飞艇环境的影响,同时飞艇表面为柔性材料,直接接触的应变片难免会产生影响,一旦应变片脱落或接触不均匀将导致测量结果错误。因此,设计一种基于图像金字塔和矩形子区的数字图像飞艇蒙皮测量方法是十分有必要的。
技术实现思路
1、本发明的目的是提供一种基于图像金字塔和矩形子区的数字图像飞艇蒙皮测量方法,能够实现对飞艇蒙皮的测量,提高了测量的准确性及快速性,提升了飞艇蒙皮实时测量的可靠性。
2、为实现上述目的,本发明提供了如下方案:
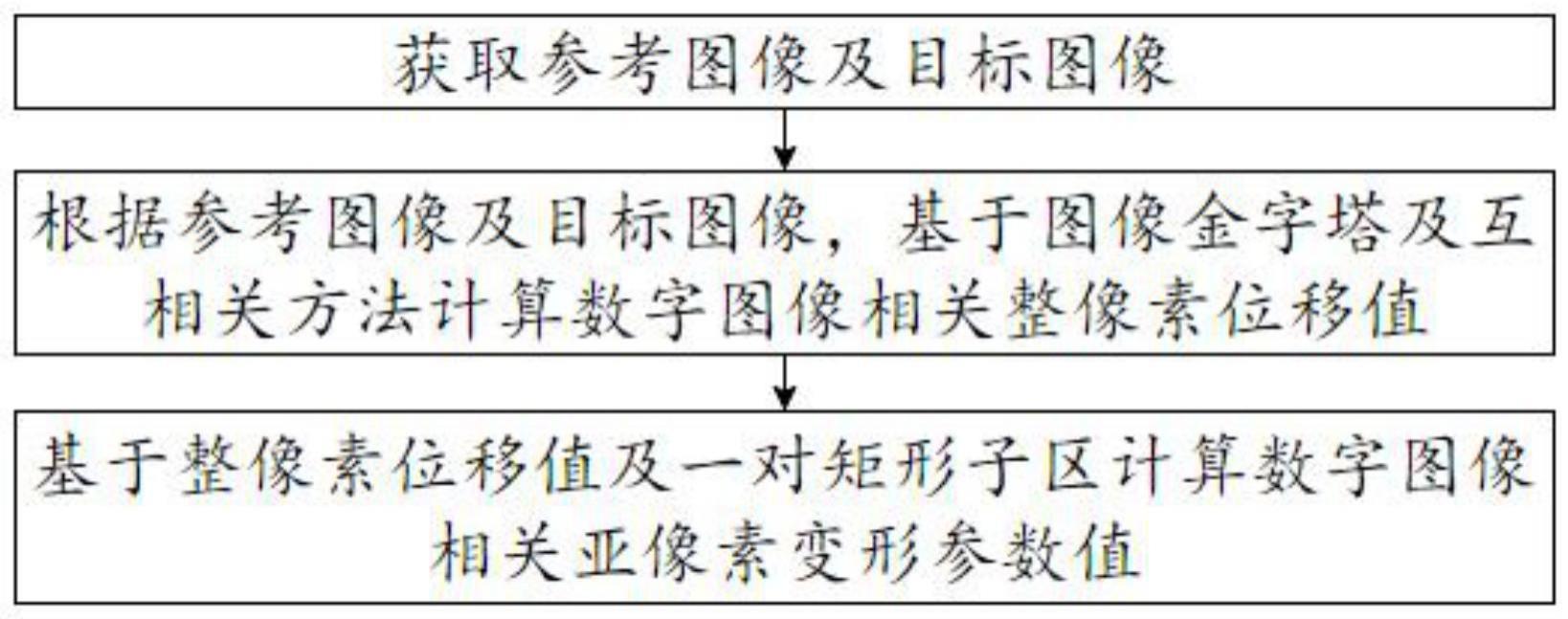
3、一种基于图像金字塔和矩形子区的数字图像飞艇蒙皮测量方法,包括如下步骤:
4、步骤1:获取参考图像及目标图像;
5、步骤2:根据参考图像及目标图像,基于图像金字塔及互相关方法计算数字图像相关整像素位移值;
6、步骤3:基于整像素位移值及一对矩形子区计算数字图像相关亚像素变形参数值。
7、可选的,步骤1中,根据参考图像及目标图像,基于图像金字塔及互相关方法计算数字图像相关整像素位移值,具体为:
8、为参考图像及目标图像构建相同层数的图像金字塔,对参考图像及目标图像中分辨率最低的图像进行快速傅里叶相关计算,其中,相关性最强的值获得整像素位移(u1,v1),即为整个图像中心点的位移,将计算得到的像素位移(u1,v1)作为下一层搜索的每个计算点的初始值,在对下一层进行计算时,计算点坐标及相应的位移加倍,在第n-k层中,在参考图像上选取以计算点坐标为中心,以(k+1)×2r+1为边长的正方形区域,根据前一层的位移值,确定目标图像中的计算点坐标,在目标图像上同样取边长为(k+1)×2r+1的正方形区域进行互相关,通过重新计算每一层的互相关,用于消除上一次传递的误差,将位移逐步传递到下一层,直至最后一层,得到位移结果为:
9、
10、式中,u和v为材料变形导致图像上一个计算点变形前后偏移的位移大小,即整像素位移,其中,u沿水平方向,v沿竖直方向,u1,...,un及v1,...,vn为图像金字塔每层的整像素位移。
11、可选的,步骤3中,基于整像素位移值及一对矩形子区计算数字图像相关亚像素变形参数值,具体为:
12、获取目标图像,基于一对矩形子区对其进行划分,分别使用w1×h1(w1>h1)的矩形子区及h2×w2(w2>h2)的矩形子区进行计算,其中,w1及h2为水平方向的像素个数,h1及w2为竖直方向的像素个数,且w1=w2,h1=h2,获取整像素位移,根据整像素位移通过最小化znssd准则,分别使用w1×h1(w1>h1)的矩形子区及h2×w2(w2>h2)的矩形子区进行计算,得到w1×h1(w1>h1)的矩形子区的增量变形参数δp1及h2×w2(w2>h2)的矩形子区的增量变形参数δp2,根据反向增量变形函数w-1(ξ,δp)及变形函数w(ξ,p)分别得到w1×h1(w1>h1)的矩形子区的变形参数p1及h2×w2(w2>h2)的矩形子区的增量变形参数p2,为:
13、p1=[u1,ux1,uy1,v1,vx1,vy1]t
14、p2=[u2,ux2,uy2,v2,vx2,vy2]t
15、根据w1×h1(w1>h1)的矩形子区的变形参数p1及h2×w2(w2>h2)的矩形子区的增量变形参数p2计算得到目标图像的变形参数p为:
16、
17、根据变形参数p得到增量变形参数δp为:
18、
19、式中,及分别为u1、u2的平均值及v1、v2的平均值,ux1、uy1、vx1及vy1表示w1×h1(w1>h1)的矩形子区在水平和垂直方向上位移的梯度,ux2、uy2、vx2及vy2表示h2×w2(w2>h2)的矩形子区在水平和垂直方向上位移的梯度,δux1、δvx1、δuy2及δvy2分别为ux1、vx1、uy2及vy2的变化量,判断变形参数p及增量变形参数δp是否满足收敛条件,若满足,则输出变形参数p,否则,则继续对两个矩形子区进行计算,直至满足收敛条件,其中,收敛条件为:
20、
21、式中,δx′为w1×h1(w1>h1)的矩形子区及h2×w2(w2>h2)的矩形子区水平方向上的所有相对计算点的偏移,δy′为w1×h1(w1>h1)的矩形子区及h2×w2(w2>h2)的矩形子区竖直方向上的所有相对计算点的偏移,其中,初次计算时,位移u1、u2、v1及v2均来源于整像素位移,其余参数则为0。
22、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供的基于图像金字塔和矩形子区的数字图像飞艇蒙皮测量方法,该方法包括获取参考图像及目标图像,根据参考图像及目标图像,基于图像金字塔及互相关方法计算数字图像相关整像素位移值,基于整像素位移值及一对矩形子区计算数字图像相关亚像素变形参数值;该方法采用整像素的方法进行估计,能够实现准确的整像素估计,同时也能加快亚像素匹配的效率,能够避免亚像素搜索方法在大变形下失效的情况,整像素方法采用图像金字塔逐层传递,在金字塔的最顶层是对全图进行计算,能够测量大变形,基于快速傅里叶互相关计算,能够在光线变化及噪声干扰下具有良好的计算效果及快速计算的优势;亚像素计算用于获取更高的测量精度,采用一对矩形子区,由于每个矩形子区在单方向上计算精度高,利用一对矩形子区互补的方式实现计算点的高精度计算,同时一对子区在每次合并变形量前可以单独计算,能够通过并行计算提高效率。
技术特征:
1.一种基于图像金字塔和矩形子区的数字图像飞艇蒙皮测量方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于图像金字塔和矩形子区的数字图像飞艇蒙皮测量方法,其特征在于,步骤1中,根据参考图像及目标图像,基于图像金字塔及互相关方法计算数字图像相关整像素位移值,具体为:
3.根据权利要求1所述的基于图像金字塔和矩形子区的数字图像飞艇蒙皮测量方法,其特征在于,步骤3中,基于整像素位移值及一对矩形子区计算数字图像相关亚像素变形参数值,具体为:
技术总结
本发明提供了一种基于图像金字塔和矩形子区的数字图像飞艇蒙皮测量方法,包括:获取参考图像及目标图像,根据参考图像及目标图像,基于图像金字塔及互相关方法计算数字图像相关整像素位移值,基于整像素位移值及一对矩形子区计算数字图像相关亚像素变形参数值。本发明提供的基于图像金字塔和矩形子区的数字图像飞艇蒙皮测量方法,能够实现对飞艇蒙皮的测量,提高了测量的准确性及快速性,提升了飞艇蒙皮实时测量的可靠性。
技术研发人员:王全保,朱方涛
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!