一种面向航天器凹舱内组件安装的三维重建方法及其装置
本发明属于航天器装配领域,特别是涉及一种面向航天器凹舱内组件安装的三维重建方法及其装置。
背景技术:
1、航天器凹舱是航天器外表面向内凹陷形成的空间统称,一般被用于安装航天器的工作部件,安装在凹舱内部的工作部件简称凹舱组件,凹舱组件与凹舱内部采用螺栓固定。
2、目前,凹舱组件安装到凹舱内部的过程多采用人工装配,通过操作员移动凹舱组件,将其与凹舱内部的螺栓安装孔对准,拧入固定螺栓。凹舱组件外形结构复杂,周边缠绕着许多管路和电缆,且与凹舱内部间距狭小。设备大而沉重、操作空间狭小和施力部位受限这三个方面的缺陷导致了操作者在安装凹舱组件的过程中难以施加平稳、可靠的作用力,凹舱组件在安装过程中晃动幅度较大,这增加了其与凹舱内部发生磕碰和刮蹭的风险。
3、机械臂具有承载能力强、空间定位精确和运行平稳顺滑的特性,通过机械臂将凹舱组件移动到安装位置后再进行固定操作可有效避免上述问题。但是,通过机械臂进行辅助安装需要依靠精准的空间位置坐标,传统的三维重建作业需要对工件进行贴点,效率低下。
技术实现思路
1、有鉴于此,本发明旨在提出一种面向航天器凹舱内组件安装的三维重建方法及其装置,以解决传统三维冲击作业需要对工件进行贴点效率低的问题。
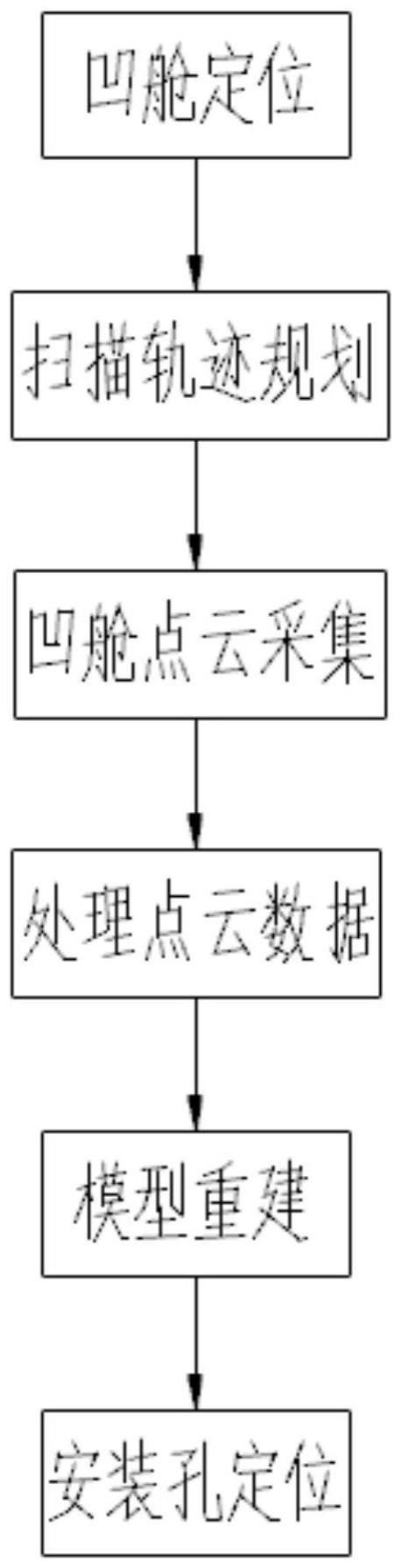
2、为实现上述目的,根据本发明的一个方面,提供一种面向航天器凹舱内组件安装的三维重建方法,包括以下步骤:
3、s1、凹舱定位,通过机械臂运动带动深度相机对准航天器舱体进行数据采集,将采集到的数据导入电脑对数据进行分析得到凹舱的轮廓信息和位置信息,得到a、b、c、d、e、f、g和h点的坐标位置信息;
4、s2、扫描轨迹规划,将凹舱四个侧边非矩形内部补齐为矩形,加上凹舱底部总共形成五个矩形扫描区,将每个矩形扫描区划分成大小相等的长方形扫描单元,每个长方形扫描单元的长度a和宽度b根据对应的矩形扫描区长度c和宽度d的数据确定,然后取每个长方形扫描单元的中心点为采集点,选取一顶角采集点作为初始点对每个采集点依次进行蛇形连线完成轨迹规划;
5、s3、凹舱点云采集,在机械臂带动下使3d相机沿轨迹运动,在每个采集点进行点云数据采集;
6、s4、处理点云数据;
7、s5、模型重建,对步骤s4生成的点云数据进行重建生成网格模型;
8、s6、安装孔定位,识别并定位网格模型中的安装孔坐标,为凹舱的安装提供精准的坐标位置。
9、更进一步的,所述步骤s1中,深度相机与航天器舱体的相对位置应保证深度相机取景框内包含凹舱整体。
10、更进一步的,所述步骤s1中利用open3d点云处理库对数据进行分析得到凹舱的轮廓信息和位置信息。
11、更进一步的,所述步骤s4中,处理点云数据的方式为:首先设定一个初始值为2的变量i,输入采集到的第i个点云;对点云i进行滤波处理,去除噪点;输入点云i和第i-1个点云的采集坐标,采集坐标为根据机械臂关节处的角度传感器信息计算得出的3d相机在每个采集点处的机械臂位姿信息;将点云i的采集坐标作为迭代初始值,对点云i与点云i-1进行配准;利用配准信息对点云i和点云i-1进行拼接;将拼接后的点云作为新点云i;判断i是否大于等于采集点总数目;如果满足,则顺次进入模型重建步骤与安装孔定位步骤,如果不满足,则i+1并返回至输入点云i处再进行循环。
12、更进一步的,所述步骤s5中,将步骤s4循环后输出的新点云i进行泊松表面重建。
13、更进一步的,进行泊松表面重建的方式为:将新点云i数据导入open3d点云处理库中进行重建。
14、更进一步的,重建利用的函数为create_from_point_cloud_poisson。
15、更进一步的,利用icp算法对点云i与点云i-1进行配准。
16、更进一步的,所述步骤s6中,采用基于轮廓形状的特征提取算法识别并定位网格模型中的安装孔坐标。
17、根据本发明的另一个方面,提供一种使用上述一种面向航天器凹舱内组件安装的三维重建方法的装置,包括机械臂、3d相机、末端法兰、深度相机和控制器,所述机械臂的末端设置末端法兰,所述3d相机和深度相机固定在末端法兰上,所述机械臂、3d相机和深度相机均与控制器电性连接,所述3d相机用于凹舱内部点云采集,所述深度相机用于凹舱的定位和运动轨迹规划,所述机械臂关节处设置角度传感器用于采集机械臂的位姿信息。
18、与现有技术相比,本发明的有益效果是:
19、1、本方法利用机械臂带动3d相机对凹舱内部进行全自动的点云数据采集,改变了传统三维重建作业需要操作者手持扫描仪进行扫描的情况;
20、2、本方法利用机械臂利用关节处的角度传感器信息计算相机位姿信息并结合icp算法进行点云配准,去除了传统三维重建作业需要事先对工件进行贴点的步骤,简化了流程,显著提高了重建效率与重建精度;
21、3、本方法凹舱内部三维模型,可以为机械臂辅助安装凹舱组件的作业提供可靠的坐标位置信息参考,为机械臂辅助安装凹舱作业的自动化提供了环境感知上的支持。
技术特征:
1.一种面向航天器凹舱内组件安装的三维重建方法,其特征在于,包括以下步骤:
2.一种根据权利要求1所述的一种面向航天器凹舱内组件安装的三维重建方法,其特征在于:所述步骤s1中,深度相机(4)与航天器舱体(5)的相对位置应保证深度相机(4)取景框内包含凹舱(6)整体。
3.根据权利要求1所述的一种面向航天器凹舱内组件安装的三维重建方法,其特征在于:所述步骤s1中利用open3d点云处理库对数据进行分析得到凹舱(6)的轮廓信息和位置信息。
4.根据权利要求1所述的一种面向航天器凹舱内组件安装的三维重建方法,其特征在于,所述步骤s4中,处理点云数据的方式为:首先设定一个初始值为2的变量i,输入采集到的第i个点云;对点云i进行滤波处理,去除噪点;输入点云i和第i-1个点云的采集坐标,采集坐标为根据机械臂(1)关节处的角度传感器信息计算得出的3d相机(2)在每个采集点处的机械臂(1)位姿信息;将点云i的采集坐标作为迭代初始值,对点云i与点云i-1进行配准;利用配准信息对点云i和点云i-1进行拼接;将拼接后的点云作为新点云i;判断i是否大于等于采集点总数目;如果满足,则顺次进入模型重建步骤与安装孔定位步骤,如果不满足,则i+1并返回至输入点云i处再进行循环。
5.根据权利要求1所述的一种面向航天器凹舱内组件安装的三维重建方法,其特征在于:所述步骤s5中,将步骤s4循环后输出的新点云i进行泊松表面重建。
6.根据权利要求5所述的一种面向航天器凹舱内组件安装的三维重建方法,其特征在于,进行泊松表面重建的方式为:将新点云i数据导入open3d点云处理库中进行重建。
7.根据权利要求6所述的一种面向航天器凹舱内组件安装的三维重建方法,其特征在于:重建利用的函数为create_from_point_cloud_poisson。
8.根据权利要求4所述的一种面向航天器凹舱内组件安装的三维重建方法,其特征在于:利用icp算法对点云i与点云i-1进行配准。
9.根据权利要求1所述的一种面向航天器凹舱内组件安装的三维重建方法,其特征在于:所述步骤s6中,采用基于轮廓形状的特征提取算法识别并定位网格模型中的安装孔坐标。
10.一种使用权利要求1-9中任一项所述的一种面向航天器凹舱内组件安装的三维重建方法的装置,其特征在于:包括机械臂(1)、3d相机(2)、末端法兰(3)、深度相机(4)和控制器,所述机械臂(1)的末端设置末端法兰(3),所述3d相机(2)和深度相机(4)固定在末端法兰(3)上,所述机械臂(1)、3d相机(2)和深度相机(4)均与控制器电性连接,所述3d相机(2)用于凹舱(6)内部点云采集,所述深度相机(4)用于凹舱(6)的定位和运动轨迹规划,所述机械臂(1)关节处设置角度传感器用于采集机械臂(1)的位姿信息。
技术总结
本发明提出了一种面向航天器凹舱内组件安装的三维重建方法及其装置,属于航天器装配领域。解决传统三维冲击作业需要对工件进行贴点效率低的问题。一种面向航天器凹舱内组件安装的三维重建方法,包括以下步骤:S1、凹舱定位;S2、扫描轨迹规划;S3、凹舱点云采集;S4、处理点云数据;S5、模型重建,对步骤S4生成的点云数据进行重建生成网格模型;S6、安装孔定位,识别并定位网格模型中的安装孔坐标,为凹舱的安装提供精准的坐标位置。它主要用于对凹舱内组件安装进行三维重建。
技术研发人员:刘刚峰,郭照坤,孙宪超,李长乐,张学贺,赵杰
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!