一种目标检测方法、系统、装置、移动机器人及电子设备与流程
本申请涉及机器人领域,尤其涉及一种目标检测方法、系统、装置、移动机器人及电子设备。
背景技术:
1、对于难清扫且易遗失物品的区域,例如,沙发下面、床下面、柜子下面等,物品掉进去后很难被找到。移动机器人,例如扫地机器人,其作为清洁机器人在清洁地面时会经常移动到上述难清扫且易遗失物品的区域,因此,如何基于移动机器人主动查找到遗失物品称为亟待解决的问题。
技术实现思路
1、有鉴于此,本申请实施例提供一种目标检测方法、系统、装置、移动机器人及电子设备,以实现通过移动机器人主动查找到目标物品,例如遗失物品。
2、根据本申请实施例的第一方面,提供一种目标检测方法,所述方法包括:
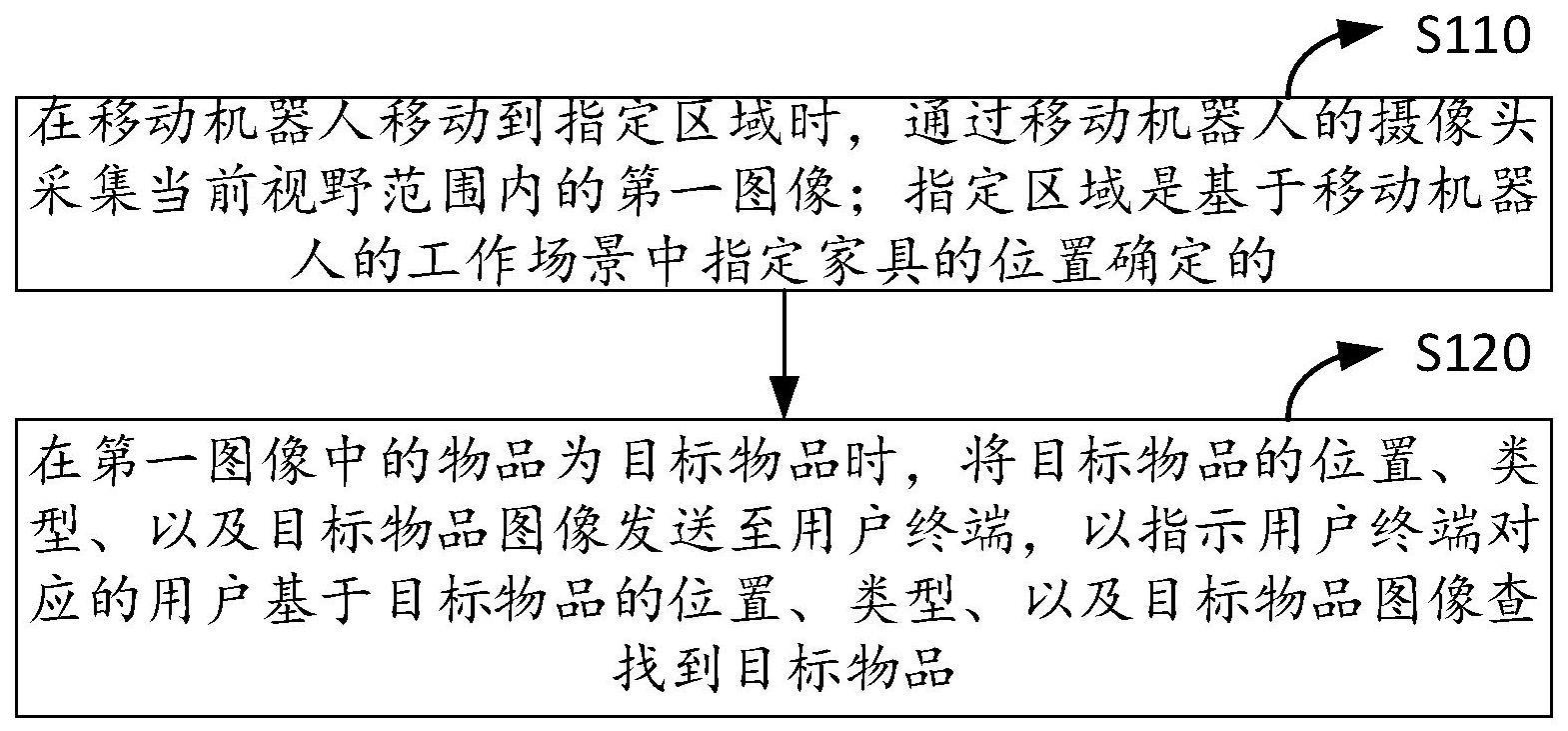
3、在移动机器人移动到指定区域时,通过移动机器人的摄像头采集当前视野范围内的第一图像;所述指定区域是基于所述移动机器人的工作场景中指定家具的位置确定的;
4、在所述第一图像中的物品为目标物品时,将所述目标物品的位置、类型、以及目标物品图像发送至用户终端,以指示所述用户终端对应的用户基于所述目标物品的位置、类型、以及目标物品图像查找到所述目标物品。
5、根据本申请实施例的第二方面,提供一种移动机器人,包括:
6、摄像头,用于采集当前视野范围内的第一图像;
7、处理器,用于执行如第一方面所述的方法。
8、根据本申请实施例的第三方面,提供一种目标检测系统,包括:
9、移动机器人,用于执行如第一方面所述的方法;
10、用户终端,用于接收到所述移动机器人发送的目标物品的位置、类型、以及目标物品图像,以指示该用户终端对应的用户基于所述目标物品的位置、类型、以及目标物品图像查找到所述目标物品。
11、根据本申请实施例的第四方面,提供一种目标检测装置,所述装置包括:
12、第一图像采集模块,用于在移动机器人移动到指定区域时,通过移动机器人的摄像头采集当前视野范围内的第一图像;所述指定区域是基于所述移动机器人的工作场景中指定家具的位置确定的;
13、物品检测模块,用于在所述第一图像中的物品为目标物品时,将所述目标物品的位置、类型、以及目标物品图像发送至用户终端,以指示所述用户终端对应的用户基于所述目标物品的位置、类型、以及目标物品图像查找到所述目标物品。
14、根据本申请实施例的第五方面,提供一种电子设备,电子设备包括:处理器和存储器;
15、其中,所述存储器,用于存储机器可执行指令;
16、所述处理器,用于读取并执行所述存储器存储的机器可执行指令,以实现如第一方面所述的方法。
17、本申请实施例提供的技术方案可以包括以下有益效果:
18、在本实施例中,通过在移动机器人移动到指定家具位置对应的指定区域时采集第一图像,当在第一图像中检测出目标物品时,就将目标物品的位置、类型、以及目标物品图像发送至用户终端,以指示用户终端对应的用户基于目标物品的位置、类型、以及目标物品图像查找到目标物品,结合家具的位置实现了通过移动机器人主动查找目标物品;
19、进一步地,当目标物品为遗失物品时,实现了通过移动机器人主动查找遗失物品。
技术特征:
1.一种目标检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,该方法进一步包括:
3.根据权利要求1所述的方法,其特征在于,所述指定区域通过以下步骤确定:
4.根据权利要求3所述的方法,其特征在于,所述获得所述移动机器人之前在工作场景进行工作时识别到的指定家具的位置,包括:
5.根据权利要求1所述的方法,其特征在于,所述目标物品通过如下步骤确定:
6.一种移动机器人,其特征在于,包括:
7.一种目标检测系统,其特征在于包括,包括:
8.根据权利要求7所述的系统,其特征在于,所述移动机器人包括:
9.一种目标检测装置,其特征在于,所述装置包括:
10.一种电子设备,其特征在于,电子设备包括:处理器和存储器;
技术总结
本申请实施例提供一种目标检测方法、系统、装置、移动机器人及电子设备。在本实施例中,通过在移动机器人移动到指定家具位置对应的指定区域时采集第一图像,当在第一图像中检测出目标物品时,就将目标物品的位置、类型、以及目标物品图像发送至用户终端,以指示用户终端对应的用户基于目标物品的位置、类型、以及目标物品图像查找到目标物品,结合家具的位置实现了通过移动机器人主动查找目标物品;进一步地,当目标物品为遗失物品时,实现了通过移动机器人主动查找遗失物品。
技术研发人员:吴佳萍
受保护的技术使用者:杭州萤石软件有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!