一种基于多源图像深度融合的水质浊度检测方法与流程
本发明涉及智能水质监测领域,特别是一种基于多源图像深度融合的水质浊度检测方法。
背景技术:
1、水是经济社会发展所依赖的不可或缺的资源,对人类的生产、生活具有重大影响。水质监测是实现水资源合理利用和保护的重要依据。浊度作为衡量水质状况的一个重要指标,浊度检测是水质监测中的一项重要内容。目前浊度检测主要通过对水源地进行采样,然后利用实验室仪器进行检测。该种检测方式需要投入较高的人力、物力成本,且难以对带有时间序列特性的水质实现浊度的动态检测。另一方面,基于图像的浊度检测目前大多采用单一光源的图像,易受环境、光照等因素的影响,其准确度还有待提升。
2、针对上述情况,提出一种基于多源图像深度融合的水质浊度检测方法。通过搭载可见光和红外光源的摄像头采集水源地的水下多源图像,利用深度网络提取图像特征进行特征融合,建立回归网络预测当前监测图像对应的浊度值,从而实现水源地浊度的动态检测。
技术实现思路
1、针对现有技术中存在的问题,本发明提供了一种基于多源图像进行深度融合的水质浊度检测方法。该方法通过水下摄像头采集水质图像,并利用预训练好的vgg16网络提取水下图像特征,然后利用2层全连接网络学习图像特征并进行特征融合,通过回归网络建立与浊度值之间的关系。本发明的方法能够利用水下多源图像,实现水源地浊度的动态检测。
2、本发明的目的通过以下技术方案实现。
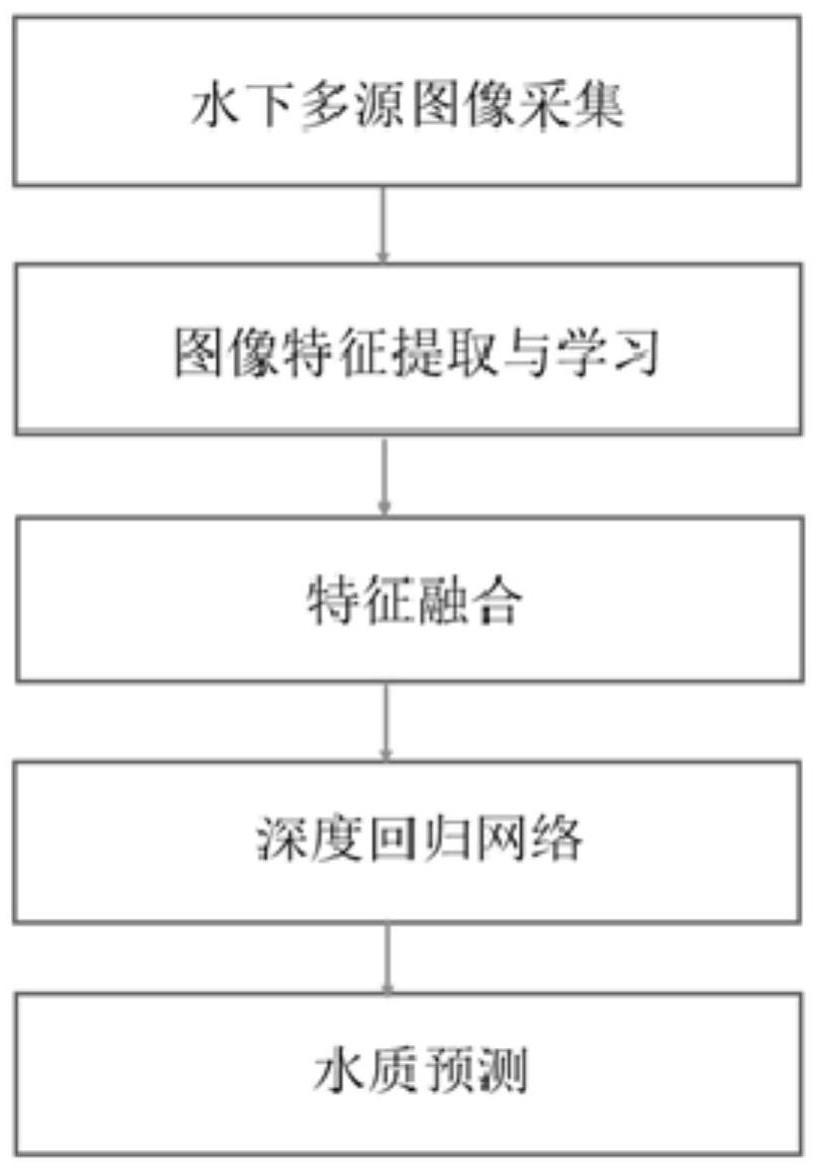
3、一种基于多源图像深度融合的水质浊度检测方法,包括以下步骤:
4、1)利用搭载可见光源和红外光源的摄像头分别获取不同浊度值下的水质图像,对采集到的可见光图像和红外图像进行人工标定;
5、2)利用卷积神经网络分别提取可见光图像和红外图像特征,并通过多个全连接层进行特征学习;
6、3)将学习得到的多源特征进行融合,通过训练深度回归网络,建立水下图像与浊度值之间的关系;
7、4)采集可见光和红外光源的水质图像,利用训练好的模型估计其对应的浊度值。
8、所述步骤1)中根据水下不同位置布置的摄像头,采集水源地多个位置的水下图像,得到多源数据其中xi1,xi2分别表示可见光图像和红外图像,yi为对应的浊度值,n表示样本的数目。
9、所述步骤2)中可见光图像和红外图像的特征提取方法采用预训练好的vgg16网络,所提取的特征维数大小为2048。
10、所述步骤2)图像特征学习采用2层全连接网络,每层网络神经元大小分别为512,256。
11、所述步骤3)中多源特征融合所使用的计算公式为:
12、
13、其中分别为步骤2中学习得到的第i个样本的可见光图像特征和红外图像特征,为融合后的特征,维数大小为128,a,b为待学习的融合系数矩阵,大小均为256×128,激活函数σ(·)=max(0,·)。
14、所述步骤3)中图像与浊度值关系采用线性回归网络,其损失函数公式为:
15、
16、其中l(w)表示模型损失函数,oi为模型输出的预测值,yi为真实值,w为待学习的参数。
17、所述步骤2)和步骤3)中的待学习参数采用自动微分技术计算模型参数的梯度,然后采用梯度下降法优化求解模型参数,采用的梯度下降法的公式为:
18、
19、其中η为学习速率。
20、所述步骤4)中针对待测样本的可见光图像和红外图像,首先使用残差网络resnet50提取特征,然后使用融合网络和回归网络预测待测样本的浊度值。
21、相比于现有技术,本发明的优点在于:1、本发明采集水下图像,采用残差网络提取图像特征,可以获取更强的水质浊度表征,进而提高后续预测效果。
22、2、本发明采用2层全连接网络实现特征学习,引入自适应参数矩阵实现多源特征融合,可以提高后续浊度检测精度。
技术特征:
1.一种基于多源图像深度融合的水质浊度检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于多源图像深度融合的水质浊度检测方法,其特征在于所述步骤1)中根据水下不同位置布置的摄像头,采集水源地多个位置的水下图像,得到多源数据其中xi1,xi2分别表示可见光图像和红外图像,yi为对应的浊度值,n表示样本的数目。
3.根据权利要求1所述的基于多源图像深度融合的水质浊度检测方法,其特征在于所述步骤2)中可见光图像和红外图像的特征提取方法采用预训练好的vgg16网络,所提取的特征维数大小为2048。
4.根据权利要求1所述的基于多源图像深度融合的水质浊度检测方法,其特征在于所述步骤2)图像特征学习采用2层全连接网络,每层网络神经元大小分别为512,256。
5.根据权利要求1所述的基于多源图像深度融合的水质浊度检测方法,其特征在于所述步骤3)中多源特征融合所使用的计算公式为:
6.根据权利要求1所述的基于多源图像深度融合的水质浊度检测方法,其特征在于所述步骤3)中图像与浊度值关系采用线性回归网络,其损失函数公式为:
7.根据权利要求1所述的基于多源图像深度融合的水质浊度检测方法,其特征在于所述步骤2)和步骤3)中的待学习参数采用自动微分技术计算模型参数的梯度,然后采用梯度下降法优化求解模型参数,采用的梯度下降法的公式为:
8.根据权利要求1所述的基于多源图像深度融合的水质浊度检测方法,其特征在于所述步骤4)中针对待测样本的可见光图像和红外图像,首先使用残差网络resnet50提取特征,然后使用融合网络和回归网络预测待测样本的浊度值。
技术总结
本发明公开了一种基于多源图像深度融合的水质浊度检测方法,通过水下成像设备采集水体的可见光和红外图像,使用深度学习模型提取图像特征,建立全连接层进行特征学习和特征融合,建立图像特征与浊度值的回归模型。本方法首先通过预训练好的VGG16网络提取可见光和红外图像特征,然后利用2层全连接网络进行特征学习,建立特征融合网络,进而利用回归模型建立融合特征与浊度值之间的关系。本发明的方法能够利用水下多源图像实现水源地浊度的动态监测。
技术研发人员:李庆铁,熊迎军,李靖,舒欣
受保护的技术使用者:上海蓝长科技集团有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!