一种基于红外的沉管隧道渗漏检测方法和装置
本发明涉及管道渗漏检测,更具体的说是涉及一种基于红外的沉管隧道渗漏检测方法和装置。
背景技术:
1、沉管隧道是把若干节的预制箱状混凝土管沉放水底,拼接连成一条通道,作为地上交通的有利补充。由于隧道工程埋深较大,渗透力强,管节、接缝处易产生渗漏,若未及时发现处理,将会破坏隧道结构,造成生命、财产的重大损失。
2、目前,红外检测作为一种非接触式方法,具有测量原理简单、响应速度快、测量范围宽、不受光线环境影响等优点,在隧道的渗漏检测中也发挥重要作用;
3、但是,由于沉管隧道长时间长距离位于海面以下,需要灯具、风机、排烟管道等设备保证其正常运行,若该等设备出现在红外相机的视场中,则会引起热异常,从而在计算机视觉中将其误认为渗漏区域,使得识别率降低、误报频繁。
4、因此,如何克服上述缺陷,提供一种能够准确识别沉管渗漏的检测方法或装置是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明对现有红外检测算法进行改进,创新性的提出了一种新型的基于红外的沉管隧道渗漏检测方法和装置,目的在于消除隧道内其他设备引起的热异常带来的干扰,准确识别沉管隧道的渗漏情况。
2、为了实现上述目的,本发明采用如下技术方案:
3、一方面,本发明提供了一种基于红外的沉管隧道渗漏检测方法,包括:
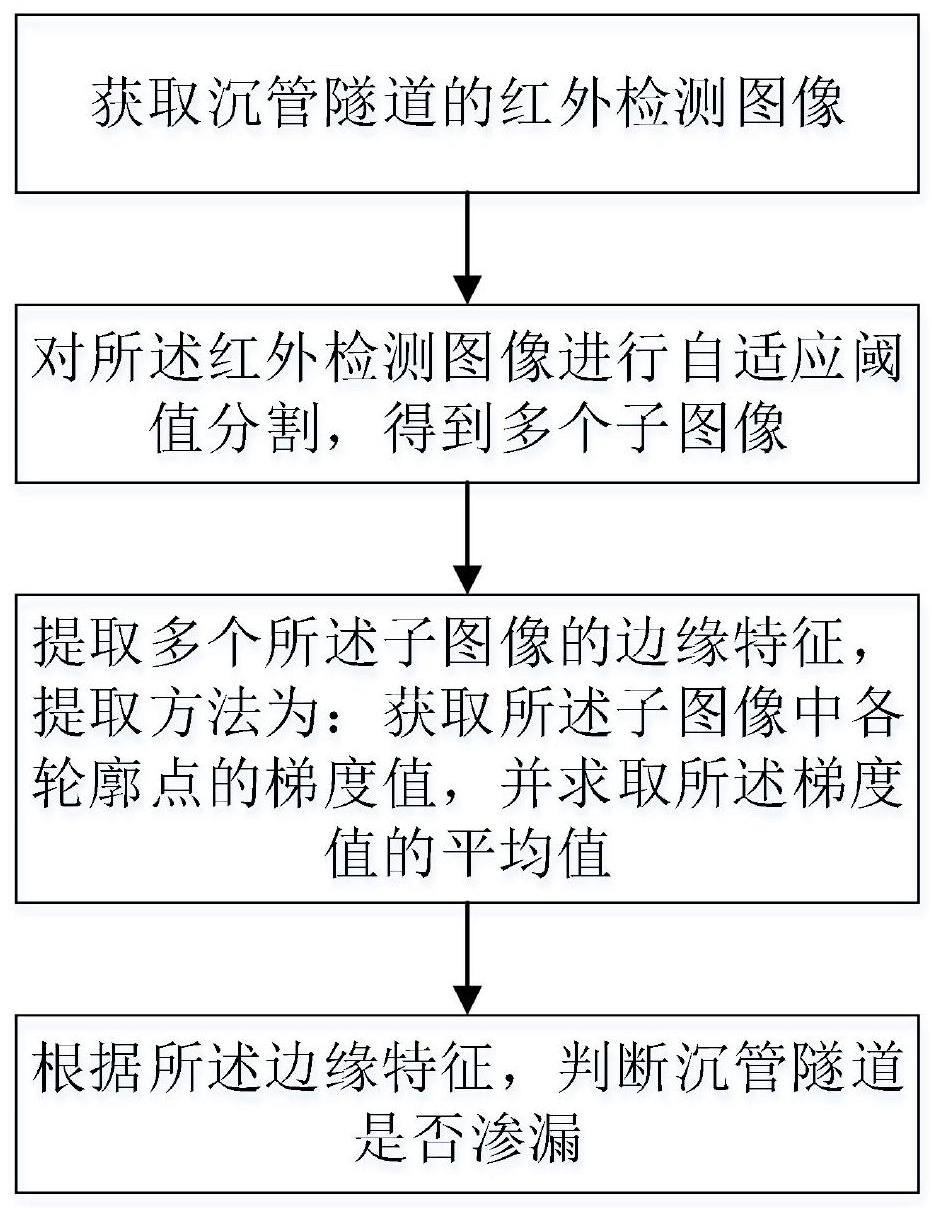
4、获取沉管隧道的红外检测图像;
5、对所述红外检测图像进行自适应阈值分割,得到多个子图像;
6、提取多个所述子图像的边缘特征,提取方法为:计算所述子图像中各轮廓点的梯度值,并求取梯度值的平均值;
7、根据所述边缘特征,判断沉管隧道是否渗漏。
8、作为优选,所述自适应阈值分割从以下三个方面进行分割,包括:邻域块的大小和阈值偏移量。
9、作为优选,设置梯度阈值,将计算所得的各轮廓点的梯度值中低于所述梯度阈值的置为0,然后求取平均值,从而提高平均值的区分度。
10、作为优选,同时提取多个所述子图像的形状特征和灰度值特征,
11、所述形状特征的提取过程为:获取所述子图像的最小外接矩形,根据最小外接矩形得到矩形长宽比,以及矩形面积与子图像面积比;
12、所述灰度值特征的提取包括:提取所述子图像与邻域灰度最大值差值、灰度范数差值、灰度极差差值、和/或最小值差值,使得达到同样检测效果的同时,大大降低计算量,从而有效提高对较长隧道的巡检效率。
13、作为优选,确定边缘特征阈值,当提取的子图像的边缘特征均小于边缘特征阈值时,判断沉管隧道无渗漏;
14、当提取的子图像边缘特征大于边缘特征阈值时,结合对应的形状特征和灰度值特征再次判断沉管隧道的渗漏。
15、作为优选,根据提取的边缘特征,形状特征、和/或灰度值特征,利用经过训练的支持向量机进行沉管隧道渗漏的识别判断。
16、另一方面,本发明还公开了一种基于红外的沉管隧道渗漏检测装置,包括:
17、红外图像接收模块,用于接收待检测的红外图像;
18、图像处理模块,应用如上所述的基于红外的沉管隧道渗漏检测方法,用于对接收的红外图像进行自适应阈值分割和特征提取;
19、渗漏识别模块,用于根据提取的特征判断沉管隧道是否渗漏。
20、作为优选,所述图像处理模块包括图像分割单元和特征提取单元;
21、所述图像分割单元,用于从邻域块的大小、阈值偏移量和阈值类型三方面对图像进行分割;
22、所述特征提取单元,用于对分割后的子图像进行特征提取。
23、经由上述的技术方案可知,本发明公开提供了一种基于红外的沉管隧道渗漏检测方法,与现有技术相比,本发明结合阈值分割与边缘检测,以提高管道渗漏检测的准确率,具体的本发明首先采用自适应阈值分割方法筛选出多个子图像,然后根据子图像的特征信息进一步判断沉管隧道是否渗漏,
24、本发明结合阈值分割和边缘检测,并综合考虑其他维度特征信息,使提供的检测方法能够克服干扰,提高渗漏检测的识别准确率、降低误报率。
技术特征:
1.一种基于红外的沉管隧道渗漏检测方法,其特征在于,包括:
2.根据权利要求1所述的一种基于红外的沉管隧道渗漏检测方法,其特征在于,所述自适应阈值分割从以下三个方面进行分割,包括:邻域块的大小和阈值偏移量。
3.根据权利要求1所述的一种基于红外的沉管隧道渗漏检测方法,其特征在于,设置梯度阈值,将计算所得的各轮廓点的梯度值中低于所述梯度阈值的置为0。
4.根据权利要求1所述的一种基于红外的沉管隧道渗漏检测方法,其特征在于,同时提取多个所述子图像的形状特征和灰度值特征,
5.根据权利要求4所述的一种基于红外的沉管隧道渗漏检测方法,其特征在于,确定边缘特征阈值,当提取的子图像的边缘特征均小于边缘特征阈值时,判断沉管隧道无渗漏;
6.根据权利要求4所述的一种基于红外的沉管隧道渗漏检测方法,其特征在于,根据提取的边缘特征,形状特征、和/或灰度值特征,利用经过训练的支持向量机进行沉管隧道渗漏的识别判断。
7.一种基于红外的沉管隧道渗漏检测装置,其特征在于,包括:
8.根据权利要求7所述的一种基于红外的沉管隧道渗漏检测装置,其特征在于,所述图像处理模块包括图像分割单元和特征提取单元;
技术总结
本发明公开了一种基于红外的沉管隧道渗漏检测方法和装置。检测方法包括:获取沉管隧道的红外检测图像;对红外检测图像进行自适应阈值分割,得到多个子图像;提取多个子图像的边缘特征,提取方法为:获取子图像中各轮廓点的梯度值,并求取所述梯度值的平均值;根据边缘特征,判断沉管隧道是否渗漏。本发明结合阈值分割和边缘检测,并综合考虑其他维度特征信息,使提供的检测方法能够克服干扰,提高渗漏检测的识别准确率、降低误报率。
技术研发人员:李帆,周思成,赵建辉
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!